SPR污水处理系统的智能控制
2011-05-21李军生
李军生
(宝鸡文理学院 陕西 宝鸡 721016)
现代城市污水处理大多采用传统的SBR工艺和CCAS工艺,其相应的处理系统均存在污水输送管道长、处理工艺流程长、占地面积大、系统组成庞大、投入大、散发臭气、处理后的水不能回用、运行费用高等问题;随着我国社会经济的不断发展,新兴工业城市规模的不断扩大,人们对水资源的需求在不断地扩大,城市可持续发展中的水污染和节水、居住环境的好坏已越来越成为人们关注的焦点,特别是那些产生高浊度高浓度污水的高污染企业,给城镇人类生存环境带来巨大的压力,人们迫切需要一种专用于高浊度高浓度污水处理的新技术,SPR污水处理技术正是应这种实际需求,依靠化学反应、物理吸附、悬浮泥层精细过滤与流体力学分离原理的巧妙结合,可直接进行高浊度高浓度污水处理的新技术,由于SPR污水处理系统具有高效、节省、占地少、无臭气散发、污水净化后可再生利用等特点,使其成为解决城市水污染和节水问题的最好途径之一;但由于SPR污水处理系统出水水质和化学药剂用量大小是依靠紊流速度、混合时间和污水净化罐特有的水力学结构设计,通过污水在瓷球污水净化罐内与药剂取得最佳混凝净化效果来保证的,这样,它们极易受到电机转速、紊流速度、电网电压波动、输入污水浊度浓度变化、罐内压力变化的影响,使出水水质变差,或因水中含有化学药剂成分较大而造成二次污染,降低系统效率;为此,提出一种通过对药筒阀门开度的模糊控制,控制流入泵前管中的化学药剂量,达到控制出水化学需氧量COD保持恒定的效果,以保证在各种条件下出水的水质,达到合理投药量的目的。
1 药筒阀门开度的控制原理
SPR污水处理工艺流程为:已被送入污水池的高浊度高浓度污水经水泵泵前管道、药筒流入处、水泵叶轮和蛇形管道以一定的流速被送入瓷球污水净化罐内,化学药剂通过泵前吸药管道、高速旋转的水泵叶轮的搅拌、蛇形反应管的紊流切割和瓷球反应罐内球面趋肤效应等途径后得以充分的混合,使污水中处于溶解状态的有机污染物、重金属离子和有害的盐类从水中析出,成为有固相界面的微小颗粒,并依靠污水净化罐内部结构凝聚吸附,在罐体的中上部形成一个几十厘米厚、致密的悬浮泥层,对出水进行过滤,输出达标的处理水;对罐内的污泥处理,当罐内形成的悬浮泥层达到一定量后,依靠涡流形成的向心力、过滤水力学形成的牵引力和自身的重量,被快速引入污泥浓缩室沉降分离,当污泥浓缩室蓄满时被定期排出。
从上面的工艺流程中可以看出,药筒阀门开度的大小在整个污水处理过程中起着很关键的作用,开度过小,随污水流入的药量小,不足以达到化学反应所需的药量,不能保证出水的COD指标;开度过大,随污水流入的药量大,造成投入浪费和二次污染;为了使阀门开度能根据流入污水的实际情况和处理的效果有合理的开度,选择处理后水中的化学需氧量COD大小作为衡量出水水质好坏的标准,通过监测出水COD大小,控制药筒阀门的开度及化学药剂的流入量,使出水COD基本保持不变,从而组成了COD闭环控制系统模式;由于在SPR污水处理工艺流程中存在物理、化学、流体力学等过程[1],使整个过程非常复杂,此对象为一个非线性、大滞后、时变不确定环节,因而,采用二维模糊控制器和传统的PI调节器相结合,构成混合型模糊控制器的控制形式,组成无差模糊控制系统[2,5-6],系统框图如图1所示。

图1 模糊控制系统框图Fig.1 Block diagram of fuzzy control system
系统的工作原理为:首先,通过COD在线检测仪测定出水的COD参数与给定的COD参数进行比较,得到偏差信号e,送到积分调节器,同时,将偏差信号和一个采样周期后该偏差的变化量ec作为模糊控制器的输入变量,经各自的量化因子,送到二维模糊控制器进行计算、判断与决策、非模糊化处理,经比例因子Kuf得到控制变量uf,与经过PI运算和强弱因子Kui处理的ui相加,得到药筒阀门开度的控制变量u,实现对污水中COD的无静差控制,提高处理后的水质。
2 模糊控制器和积分调节器的设计
2.1 模糊化处理
为了提高系统的性能,模糊控制器采用二维模糊控制器,其输入信号分别为COD偏差信号e和偏差的变化量ec,阀门开度控制信号uf,其对应的模糊变量分别为E、EC、Uf。
模糊化处理就是将输入变量、输出变量、控制变量由基本论域转换成相应的模糊论域。而基本论域一般由实际要求决定,模糊论域由经验设定,其量化因子、比例因子及实际输入值的计算公式为[3]:

式中,x为输入输出变量的实际值,a、b为其基本论域的上下限,c、d为模糊集论域的上下限,k为量化因子或比例因子。
根据SPR污水处理工艺的实际情况,通常出水COD一般要求为40 mg/L以下,本系统中出水COD要求基本稳定在30 mg/L,设偏差 e的基本论域为[-30,30],其模糊量 E的模糊论域为[-6,6],则模糊量化因子Ke=0.2;误差变化率ec的基本论域为[-6,6],模糊量EC的模糊论域为[-6,6],则模糊量化因子 Kec=1;控制量 uf的基本论域为[-78°,78°],其模糊量 Uf的模糊论域为[-6°,6°],则比例因子Ku=13。为了提高稳态精度,E的模糊集取8个元素,有NO和PO之分;EC及Uf的模糊集取 7 个元素,它们是 NB(负大)、NM(负中)、NS(负小)、NO(负零)、ZO(零)、PO(正零)、PS(正小)、PM(正中)、PB(正大)。
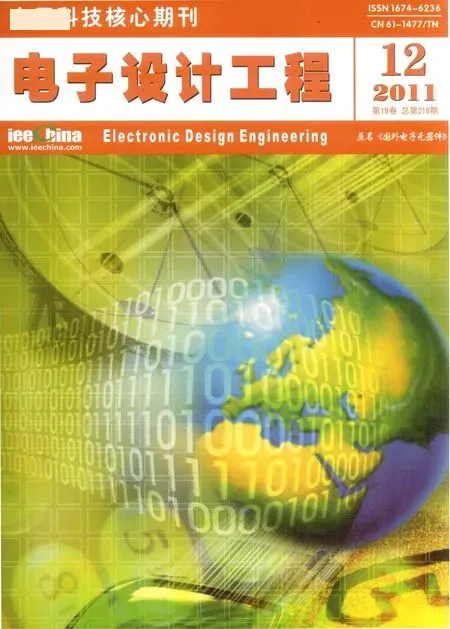
各变量隶属函数的确定是由实际具体情况和设计者的经验来选择的,不同形状隶属函数所代表的控制含义不同,系统的性能不同,为使系统具有较好的稳定性,隶属度函数均取为三角形函数,表1为COD偏差E的隶属度列表,其他列表在此省略。
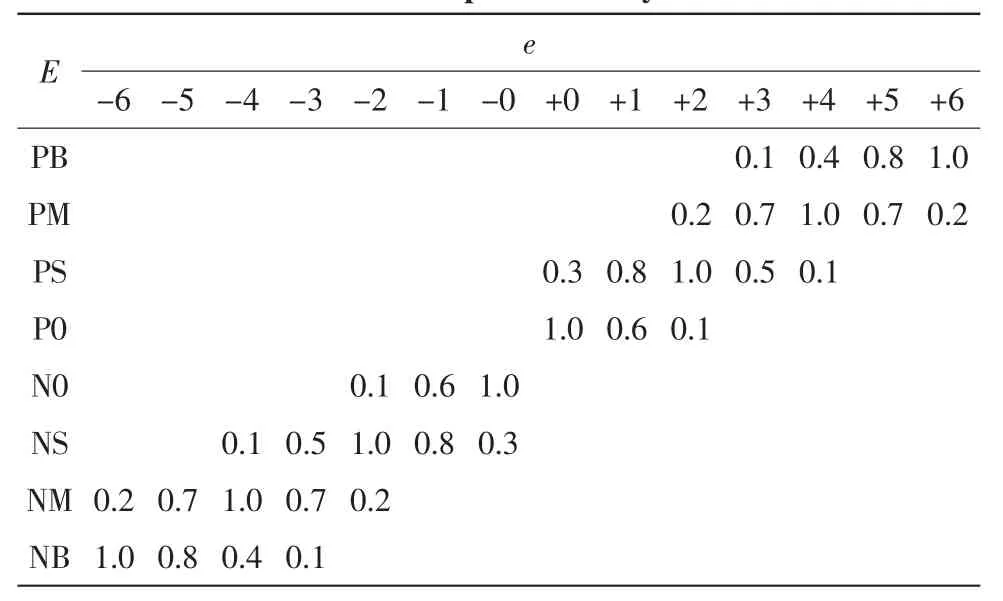
表1 模糊变量E的隶属度表Tab.1 Membership list of fuzzy variable E
2.2 模糊控制规则
模糊控制规则建立的原则是必须保证引入模糊控制器能使系统的动态性能和静态性能达到最佳,根据总结的实际控制经验和实际运行情况,建立的糊控控制规则可用21条模糊条件语句来描述,具体以表2的形式来表示。
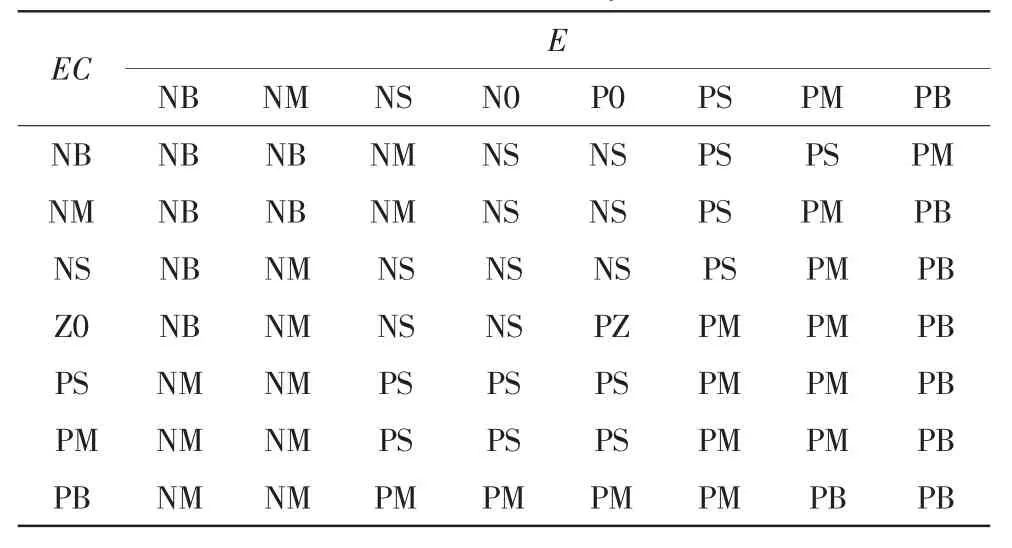
表2 模糊量Uf的模糊控制规则表Tab.2 Rule table of fuzzy variable Uf
2.3 解模糊化
根据模糊控制规则表2,运用模糊推理合成规则,可求出输出模糊量,采用最大隶属度法进行解模糊化计算,即可得到药筒阀门开度控制的模糊控制量表,如表3所示。当系统进行控制时,只要知道E和EC的值,按此表所对应的数值乘上比例因子Kuf,即可得到药筒阀门开度的实际控制量,通过对流入药量的控制,实现最终COD的控制。

表3 模糊量Uf的模糊控制表Tab.3 Fuzzy control table of fuzzy variable Uf
2.4 PI调节器设计
为了提高系统的静态性能和稳态准确度,系统在采用模糊控制的同时,又引入传统的PI控制,组成了混合型模糊控制器的形式,PI调节器采用位置式数字PI算法,其参数KPI、TI按典Ⅰ系统的二阶最佳系统进行设计[4](具体过程省略),ui的变化范围为[-12°,12°],强弱因子 Kui=0.133 3,它与 uf相加共同完成对药筒阀门开度的控制。
3 模糊控制的软件设计
鉴于常规的SPR污水处理系统一般均采用PLC对系统各部分进行开关量控制,为了节省硬件资源,降低成本,根据PLC内部资源的使用状况,在允许的条件下,可在系统硬件方面增加A/D模块、D/A模块、COD在线检测仪及变送电路、药筒电阀门进行硬件改造;也可采用PLC+单片机的模式进行控制。
在软件方面,设计时将增加硬件初始化、软件初始化,参数 Ke、Kec、Kuf、T、KPI、TI的预置和各变量的量化,模糊控制表及量化预置、计算、判断等内容,其模糊控制子程序流程图如图2所示。
4 模糊控制仿真与结论
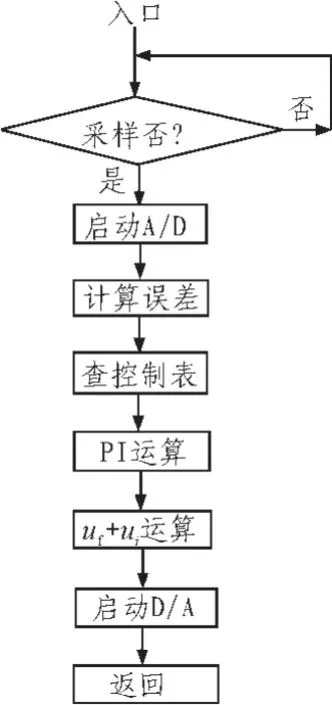
图2 模糊控制子程序图Fig.2 Subroutines diagram of fuzzy control
鉴于本设计的控制对象为电磁阀和污水净化罐,根据它们的电磁物理过程和实际运行情况,其传递函数可以用2个惯性环节来等效,为了分析该模糊控制系统对输入信号的响应情况,在MATLAB中,用FUZZY工具箱构造模糊控制器,建立了模糊控制系统仿真模型,仿真参数设置如下:电磁阀的惯性时间常数T1=0.05 s,比例系数K1=4.8;污水净化罐的惯性时间常数T2=0.5 s,比例系数K2=0.44,采样时间T=0.1 s,通过对出水COD的给定设置(30 mg/L)进行仿真,仿真结果如图3所示。从仿真曲线可以看出,控制速度快,超调量小,调节时间短,系统具有良好的动态响应性能、静态性能和较高的鲁棒性。
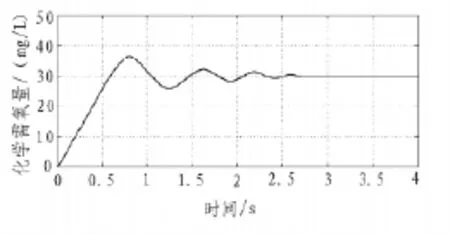
图3 系统仿真波形Fig.3 Simulation waveformof system
[1]马勇,彭永臻.城市污水处理系统运行及过程控制[M].北京:科学出版社,2007.
[2]陶永华,葛芦生,等.新型PID控制及其应用[M].北京:机械工业出版社,2001.
[3]诸静.模糊控制与应用[M].北京:机械工业出版社,1999.
[4]陈伯时.电力拖动自动控制系统[M].3版.北京:机械工业出版社,2007.
[5]YANG Guo-jing, LI Xiao-ming, ZENG Guang-ming, et al.Simultaneous biological phosphorus and nitrogen removing technology-denitrifying dephosphatation[J]. Environmental Science&Technology, 2005, 28(2):107-109.
[6]XUE Jun, XIE Xi-dong, An Chang-wei.The experimental study of intergrated sewage treat process[J].Environmental Chemistry and Technology, 2009, 32(12): 154-159.