宽幅喷墨打印机字车机构运动及控制联合仿真
2011-05-18李剑笛
廖 强,李剑笛
(重庆大学 a.机械传动国家重点实验室;b.机械工程学院,重庆 400030)
宽幅喷墨打印机是一种典型的机电一体化设备,而其字车机构是打印机中最为重要的运动机构。在字车机构的设计过程中,不但要设计出合理可靠的机械部分和性能优越的控制系统,而且要解决机械系统和控制系统的耦合问题。如依据传统的设计流程,往往是先设计、制造出产品的机械部分和控制部分实物模型,然后分别测试,测试通过后,再进行机械部分和控制部分的组装,进行联合测试验证,如果联合测试验证没有通过,则需修改出现问题的部分,进行改进。重复上述过程,直至产品通过联合测试验证[1-4]。这个过程是相当繁琐的,成本也很高,更重要的是推迟了产品的上市时间,失去了市场机会。随着计算机技术及CAD/CAE、机械动力学仿真、控制仿真技术的发展,仿真的可信度和效率越来越高,现在人们广泛应用虚拟样机技术进行机械系统的运动学和动力学仿真分析[1-2],应用控制仿真软件进行控制系统的设计及验证[5]。对虚拟样机和控制模型的仿真实验可以代替大部分的实物实验。如果仅是分别在虚拟样机软件中对机械部分进行分析,在控制仿真软件中对控制部分进行验证,也只能各自验证机械部分和控制部分的性能,不能对机械和控制二者的耦合情况进行验证,而二者的耦合问题又是极为重要的,往往关系到机电一体化设备设计的成败。这种同时对复杂的机械系统和控制系统进行仿真的需求,在一个单一的软件环境下是很难做到的。在本宽幅喷墨打印机设计中,利用Adams提供的Adams/Controls插件,在Adams中建立打印机字车系统的机构模型,在Matlab中建立起对字车速度进行控制的模糊PID控制系统,结合Adams和Matlab对宽幅喷墨打印机字车机构进行运动及控制联合仿真,可以随时调整结构及控制参数,验证设计方案性能,极大地加快了设计进程。
1 宽幅喷墨打印机组成及其字车机构
打印机组成及原理:结合图1,普通PC机对待打印的图像处理成打印机可接受的信息,经数据线传输给主控制卡,主控制卡根据待打印信息和反馈信息,发出合适的控制信息,驱动字车电机转动,从而通过字车传动系统带动字车在机架横梁上的精密直线导轨上往复运动,固定在字车上的CMYK四色喷头在控制板卡的控制下,在正确的位置喷出合适比例的墨水即完成打印动作,当打印一趟后,走纸电机驱动走纸辊转动,带动纸张走动一个喷墨头宽度,准备下次打印。
由图2所示,字车系统由直流电机、电机同步带轮、右同步带轮、左同步带轮、电机同步带、字车同步带、字车、字车导轨、直线光栅传感器构成。字车铆接在字车同步齿形带上,直线光栅传感器把字车的速度和位置信息传送给主控制板卡,控制卡利用此反馈信息及打印机的其他状态信息,通过专用的直流电机驱动模块对电机进行PWM驱动,电机的转动通过同步带带动字车在字车导轨上运动。

图2 打印机字车机构示意图
本宽幅喷墨打印机设计的最大打印宽度为3.2 m,字车在开始打印时,要快速加速到打印速度,受限于喷头的喷墨频率,字车速度不宜超过0.6 m/s,但要提高打印速度,又要使字车速度尽量快,因此,字车打印速度定为0.55 m/s。字车在整个打印阶段要保持速度的平稳,否则会造成某些像素点墨滴重合或漏喷,严重降低打印质量。
字车机构作为打印机最为重要的运动机构,为保证字车系统能满足运动和控制要求,设计中对字车机构进行了反复的联合仿真验证,仿真的可信度高低很大程度上取决于仿真模型对实际系统的符合度[5]。本仿真中,应用Pro/e和Adams构建了字车系统的机构模型,并在Simulink中构建了模糊PID控制系统。直流电机的驱动也采取与真实系统相符的PWM驱动方式。机构运动模型和控制模型的耦合也得到处理。
2 机械系统的建模、仿真,联合控制结构的导出
2.1 字车系统的机械部分建模及仿真
在Pro/e中完成宽幅喷墨打印机字车机构的实体模型及装配体的建立,然后把字车机构装配体模型整体导入Adams,在Adams中完成运动约束副的定义,合理定义各运动副的摩擦,尽量与真实系统相符[6]。先对字车驱动电机同步带轮施加一个常数转动驱动,进行一次仿真。若通过运动仿真,说明此模型正确,可以进行下一步操作;如果有误,则修改,直到正确。验证通过后,删除先前电机带轮上的转动驱动,在此齿轮上施加一个驱动力矩。随后在仿真的过程中,此力矩由Simulink输入,即为直流电机输出的驱动转矩大小。
在Adams中创建状态变量Torque和vel,Adams与控制软件在运行过程中利用Torque和vel进行信息交互。其中:Torque作为Adams的输入变量,其值由控制系统经运算后决定;vel作为Adams的输出变量,其值设为VX(BEAMSIMPLESTL-1,ZICHE-CG,BEAMSIMPLE-STL-1),即为求取机构运行过程中字车x轴向平移速度,对应于真实打印机中直线光栅传感器测出的字车速度,vel好似Adams中一个对应的虚拟速度传感器的输出,将其值作为Adams的输出。修改前述齿轮上作用的力矩,使其等于VARVAL(Torque),即把Matlab运算输出的Torque值作为驱动力矩的值,使其驱动虚拟字车系统运动。Adams与Matlab的状态变量交换如图3所示。
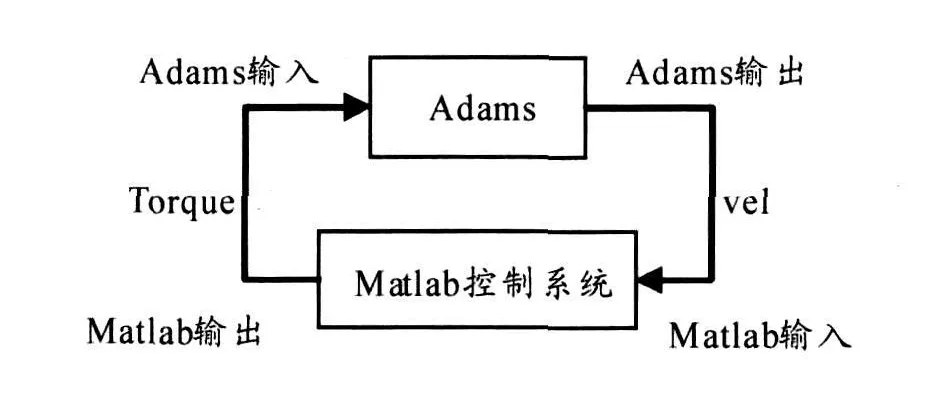
图3 Adams与Matlab的状态变量交换
2.2 导出联合控制结构
完成状态变量的定义和驱动力矩的修改后,可以导出联合控制结构(Adams control plant),注意Torque和vel分别作为adams-plant的输入变量和输出变量,Adams生成了用于仿真的m文件及Simulink仿真模块。在Simulink中进行控制系统搭建时,需用到adams-sub模块(如图4所示),它是Adams为本字车系统生成的用于在Simulink中进行仿真时联系Adams和Matlab交换状态变量用的。在一个仿真歩开始时,Adams和Matlab交换状态变量的实时值,然后按照本次读取的输入状态变量的值各自求解,如此循环,直至完成仿真[2,4]。
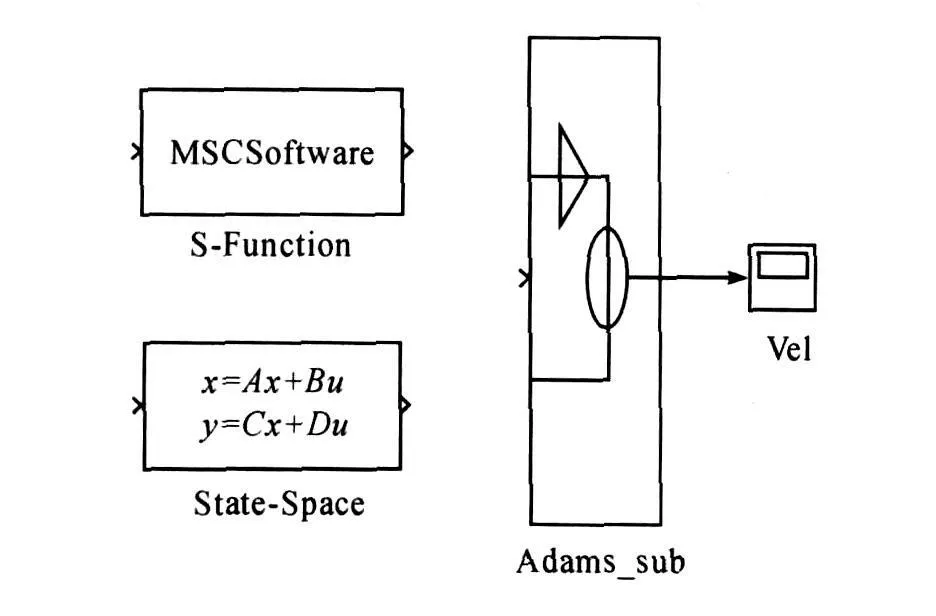
图4 用于仿真的adams-sub
3 控制系统建模
对打印机字车的速度控制采用模糊PID控制方法,在运行中根据字车的实时状态,动态修改PID控制的参数,以使控制达到要求。控制系统仿真模型选择在Matlab/Simulink环境中搭建,充分利用Matlab模糊逻辑工具箱和电力电子系统仿真工具箱,以使建模快捷,可靠。
3.1 模糊PID控制方法
PID控制是在工程中应用最为广泛、成熟的控制策略[7-9],它是对偏差信号ε(t)进行比例、积分和微分运算后生成的一种控制规律,通过选择合适的比例系数Kp、积分系数Ki、微分系数Kd可以得到满意的结果。但它对控制对象的数学模型精确性依赖大,在整个控制过程中参数恒定不变,难以达到最佳控制效果[8-9]。宽幅喷墨打印机字车系统中存在间隙、摩擦等非线性因素,且当打印机启动时,要求字车快速加速到喷印速度,在达到喷印速度进行喷墨打印时,字车速度波动又极小,要保证速度的平稳性,所以应用一组恒定的参数很难达到好的控制效果。因此,最好能在打印机运行的过程中,根据打印机的实时状态对PID控制的参数Kp、Ki、Kd进行动态调整,以达到控制要求。本仿真应用模糊推理理论,构建模糊PID控制器,使其根据速度的误差和误差变化率来动态改变PID控制的参数Kp、Ki、Kd[8-9]。
模糊控制是建立在模糊集合论基础上的一种基于语言规则与模糊推理的控制理论,它是智能控制的一个重要分支,近年来,模糊控制在洗衣机、电冰箱、照相机、空调等家电数码产品中得到了大量成功的应用。模糊控制器是模糊控制系统的核心。模糊控制系统性能的优劣主要取决于模糊控制器的结构、所采用的模糊规则、合成推理算法,以及模糊决策的方法等[8-9,12]。
模糊PID控制器通过在运行过程中不断地检测e和ec,根据模糊推理规则对Kp、Ki、Kd三个参数进行动态修改,从而使被控对象拥有良好的动静态特性,满足控制要求[8-9],其典型结构如图5所示。

图5 模糊PID控制器结构
Kp、Ki、Kd的实时值为:
Kp=Kp′+ΔKp
Ki=Ki′+ΔKi
Kd=Kd′+ΔKd
其中:Kp′、Ki′、Kd′分别为Kp、Ki、Kd上一次的的值;ΔKp、ΔKi、ΔKd分别为经模糊推理后对Kp、Ki、Kd所作出的修正。
3.2 模糊控制器的建立
对于本模糊控制器的输入e和ec,确定其论域均为[-100,100],其模糊子集均取为{负大,负中,负小,零,正小,正中,正大},用字母表示为{NB,NM,NS,Z,PS,PM,PB},将Kp、Ki、Kd的模糊子集也定为{NB,NM,NS,Z,PS,PM,PB}。在本文中,将Kp、Ki、Kd分别量化到[-40,40]、[-12,12]、[-50,50]。对e、ec、ΔKp、ΔKi、ΔKd的模糊子集NB,NM,NS,Z,PS,PM,PB的隶属度函数均分别取Matlab预定义隶属度函数为zmf、trim f、trimf、trimf、trimf、trimf和smf,根据实际其参数各自对应设置。
根据PID控制中各参数的作用,结合工程控制经验,可得到模糊控制规则表[8-9],如表1所示。第1条规则含义为:如果e是NB,且ec是NB,则ΔKp是PB,ΔKi是NB,ΔKd是PS,其余规则含义类似。

表1 模糊控制规则
在Matlab中利用模糊逻辑工具箱中的图形化编辑工具可以很方便地生成上述模糊推理系统[13],取名为fzpidcon.fis,利用重心法对输出变量进行量化。完成后,可利用提供的可视化工具方便地观察输入和输出的关系,e和ec与ΔKp、ΔKi、ΔKd的关系可通过观察输出曲面直观地看到,如图6~8所示。

图6 ΔKp输出曲面

3.3 控制模型的搭建及仿真
控制模型的搭建:充分利用基本的Simulink模块和Simpowersystems模块库以及Adams导出的控制模块adams-sub和前面建立的模糊推理系统fzpidcon.fis建立控制模型。
Simpowersystems对Simulink进行了扩展,允许采用标准符号对电子电路进行建模和仿真,提供全面的模块库,以构建具体的电力系统模型,这些模块库经过大量的验证,性能可靠[14]。本次仿真运用该模块中的直流电机模型和PWM发生器,利用经模糊PID运算后的误差信号调制PWM发生器的脉宽,对直流电机进行控制[14-15],简化了模型的搭建,提高了仿真的方便性和可靠性,而且更加符合打印机的真实模型。其中的直流电机模块可以仿真电机的电磁特性和机械特性,本仿真中,就利用其机械信号接口实现Adams中的负载和控制系统的耦合。本仿真的Simulink模型如图9所示。模型中,要注意Adams中与Matlab中信号单位的匹配比例关系,以及电机模型与机械系统的力矩与负载的联系,取字车速度Vel作为控制和反馈信号。
搭建好模型后,设置好合适的参数,运行一次7 s的仿真,结果如图10所示,上方曲线为速度曲线,下方曲线为控制力矩。通过分析仿真结果可得,控制系统可以很好地把字车速度控制在551 mm/s,速度波动在0.3%以内。在字车加速阶段,控制力矩大,以使字车快速达到打印速度,在字车达到打印速度后,控制力矩减小,主要用于克服阻尼力,其大小变化是因为要抑制字车速度的波动。
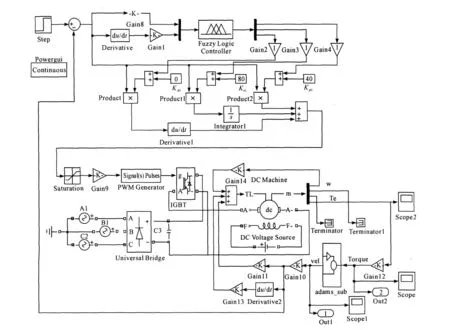
图9 控制系统的Simulink模型
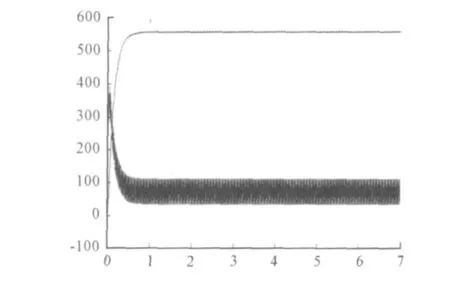
图10 字车速度Vel和输入转矩Torque
4 结束语
针对宽幅喷墨打印机设计过程中对字车系统运动和控制的需求,利用Adams/Controls插件联合Adams和Matlab对字车进行了机构运动和控制仿真。通过联合仿真可以很方便地调整、优化机械系统的结构参数和控制系统的各控制参数,极大地提高了设计效率,这为在没有物理样机的情况下得到优良的结构参数和控制参数提供了极大方便。本联合仿真方法可以用于其他大多数的机电一体化系统,尤其是对于复杂系统,通过利用Adams和Matlab的功能,构建出复杂的机械系统和控制系统联合仿真模型,可在设计的各个阶段,方便验证各种设计方案和各种设计参数,从而设计出最优产品,极大加快产品的开发速度,提高产品的性能。
[1] 郑建荣.ADMAS虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.
[2] 葛正浩.Adams2007虚拟样机技术[M].北京:化学工业出版社,2010.
[3] 王玉,高桂仙,富国亮.虚拟样机技术的应用研究[J].安徽农业科学,2009,37(24):11720-11721.
[4] 李杰仁,马吉胜,郑海起,等.某高炮自动机虚拟样机仿真[J].四川兵工学报,2009,30(6):69-71.
[5] 张晓华.控制系统仿真与CAD[M].3版.北京:机械工业出版社,2009.
[6] 郑凯,胡仁喜,陈鹿民.ADAMS 2005机械设计高级应用实例[M].北京:机械工业出版社,2006.
[7] 王积伟,吴振顺.控制工程基础[M].北京:高等教育出版社,2001.
[8] 刘金琨.先进PID控制MATLAB仿真[M].2版.北京:电子工业出版社,2004.
[9] 黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010.
[10]刘金琨.智能控制[M].北京:电子工业出版社,2009.
[11]吕佳.污水处理过程中的模型参数自校正控制器设计[J].重庆师范大学学报:自然科学版,2007,24(1):44-47.
[12]韩峻峰.模糊控制技术[M].重庆:重庆大学出版社,2003.
[13]张国良,曾静,柯熙政.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002.
[14]周渊深.交直流调速系统与Matlab仿真[M].北京:中国电力出版社,2007.
[15]杜坤梅,李铁才.电机控制技术[M].哈尔滨:哈尔滨工业大学出版社,2002.
