基于遗传算法的阵列天线综合及分析
2011-05-11王黎莉
张 旺,王黎莉,伍 洋
(1.中国电子科技集团公司第五十四研究所,河北石家庄050081;2.中国交通通信信息中心,北京100011)
0 引言
天线阵列的综合是指在给定天线辐射方向图,或给定天线的性能参量的要求来设计天线阵的阵元数、单元间距,单元上电流的幅度与相位分布。对一个给定阵元数目和阵元间距的天线阵而言,这一问题就是要寻求各个阵元上激励电流的幅度和相位分布。天线阵列综合是一个可以用很多经典方法求解的非线性的优化问题。然而,这些方法往往只对于有一个约束条件的问题有效,对于更加复杂的问题,经典的问题往往因为容易受到局部最小值的影响而变得无能为力。作为一种典型的全局优化算法,遗传算法可以有效求解非线性问题,因而可以将其应用于阵列综合。
这里将遗传算法和谢昆诺夫法相结合,用于给定方向图的峰值和零点位置的天线阵列的综合,并对关键环节进行了分析。
1 遗传算法
遗传算法(GA)是在上世纪60年代、70年代由Holland等人提出的一种全局优化算法,该算法仿效生物的进化与遗传,根据“生存竞争”和“优胜劣汰”原则,通过选择、交叉、变异,使要解决的问题逼近最优解。与经典的优化算法相比,遗传算法具有以下特点:①遗传算法使用参数组,而不是参数本身;②遗传算法使用一组点搜索,而不是单个点;③遗传算法使用目标函数信息,而不是推导或者其他辅助信息;④遗传算法使用概率规则,而不是确定规则。
遗传算法主要有3个操作:复制、交叉和变异。复制是根据其适应度值将现有个体的信息复制给下一代的过程。选择之后,交叉利用基因重组由2个现有个体产生出2个新的个体。而变异在遗传算法中扮演着关键的角色,一个随机选中的个体通过随机变异成为了另一个体,具有个一个或多个新的特性。变异扩展了搜索范围,改善了解的多样性。
适应度函数是将物理世界和遗传算法联系起来的唯一的关系,每一组解与其他组解相比的优劣都使用适应度函数来评价。适应度函数是被优化的函数,但还没有确定适应度函数的规则,每个问题中适应度函数的范围都是不断变化的。为保持各种问题的统一性,适应度函数被归一化到0~1的范围内。而适应度值决定了每组解解决问题的能力,图1给出了遗传算法应用的基本流程。

图1 遗传算法流程
2 阵列天线综合
谢昆诺夫法是天线阵列方向图综合的一种经典方法,可以在方向图的指定位置产生零深。将谢昆诺夫法和遗传算法相结合,可以综合出具有指定波束零点的赋形波束。
由N+1个阵元构成的线阵列的阵因子可写为:

式中,In是第n个阵元的复激励,k为波数。应用谢昆诺夫单位圆方法,在式中作变换Ψ=kdcosθ和ω=exp(jΨ)可以得到:

式中,ω1,ω2…ωN是多项式的N个根,若令IN=1,则式(2)的幅值可以写为:

由式(3)可知只有位于单位圆上的根对方向图的零点做出贡献,若N个根中有M个不在单位圆上,将它们用ω′m表示,则有:

可将式(3)进一步写为:

应用该方法对一30元线阵进行综合,阵元间距d=0.5λ。针对这一问题,式(3)应该有29个根。令目标方向图主波束在60°方向,有17个目标点和18个零点位置(18个确定的根),因而有11个待定根,也就是22个变量(11个幅度变量和11个相位变量)。各变量取8位二进制编码,种群规模为50,交叉概率取0.6,变异概率取为0.02,利用Matlab编程迭代200次,重复执行10次,各次迭代的适应度值及阵列方向图综合结果分别如图2和图3所示。
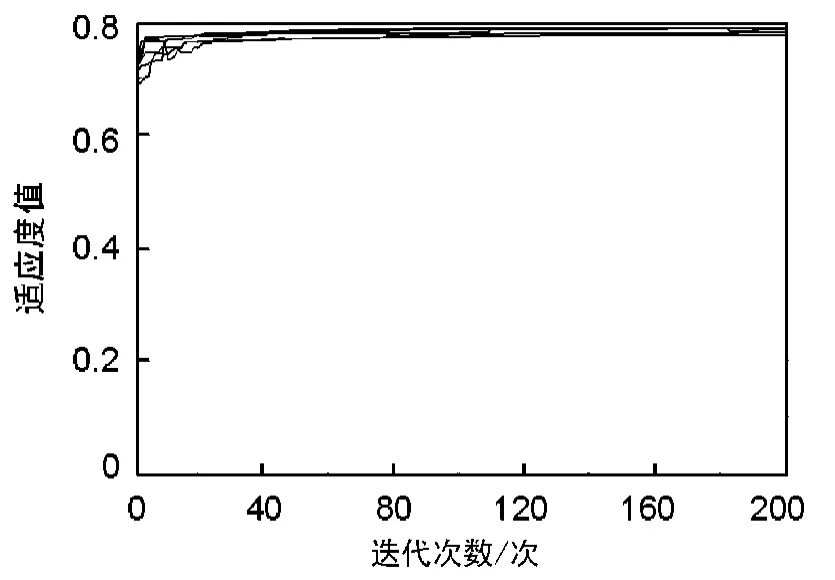
图2 各次迭代适应度值
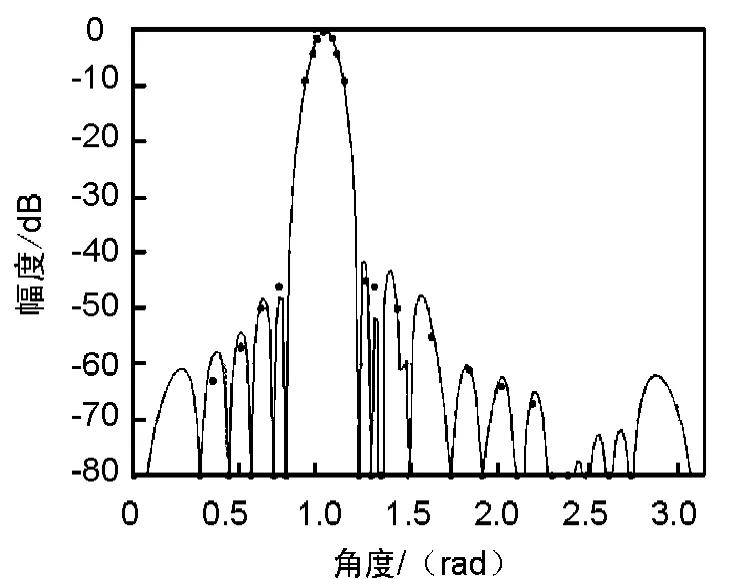
图3 方向图综合结果
计算采用轮盘赌方式选择父本,适应度函数取
式中,ei(θ)为个体相对误差,Tθk为目标方向图在θk点的幅值,Pθk为θk点处的个体综合的方向图值,Q为种群规模。根据求得的方向图,经过变换就可得到各个阵元的激励。
3 关键环节分析
前面利用遗传算法结合谢昆诺夫法对给定波束零点的赋形波束进行了综合,该方法方便准确地在方向图中得到指定位置的零点,并尽量满足波束辐射要求,仿真结果表明了这种方法的有效性,但也暴露了一些问题。
3.1 遗传算法的特点
遗传算法不依赖于初始值以及各种数理推导,仅通过“优胜劣汰”的竞争法则使得“适者生存”,得以产生新的个体,并不断重复这一过程直至得到最优解,方法简便易行,但这也造成了遗传算法的重大缺点:由于缺少对最优解方向的更多推断,使得遗传算法需要进行多次迭代运算,这对于适应度值个体参数之间具有复杂关系、需要进行大量计算的问题才能得出个体适应度值的问题(如需数值计算才能得出结果的复杂电磁问题)来说,无疑是要耗费海量时间的,导致该方法只具有理论意义。而中间各代个体值则仅仅被使用一次,也使得大量耗时的计算过程的意义大大降低。
3.2 计算过程的不确定性
由于初始参数选取以及进化过程的不确定性,各次迭代的结果往往存在差异,虽然总体符合一定的规律,但可能会出现与其他结果差异较大的结果(可能好也可能坏),因而仅依靠一次迭代便得出结论是片面的,但多次重复计算过程,进一步增大了遗传算法的计算量。
3.3 适应度函数的选取
适应度函数的选取对于结果会有极大的影响,如该文算例中ei(θ)分别为归一化误差和时,得到的结果不同,这一影响反映在主瓣误差和旁瓣误差的权重上。该算例所取误差为分贝误差,此时结果与目标拟合较好,若取归一化误差,则主瓣拟合结果变差,如图4所示。

图4 改变适应度函数后的结果
3.4 目标函数的定义
遗传算法中目标函数的定义应更加明确。该算例中给出了方向图的主波束、零点位置以及若干个目标点,但对于非目标点处的方向图未加定义,对于给定目标点是否位于旁瓣峰值也未定义,因而具有高适应度值的方向图可能反而与期望方向图有较大差距。因此采用包络线作为优化条件更具有普遍性,可以在各个点上对方向图进行约束。
3.5 终止条件的确定
迭代的终止条件不明确。该文采用迭代200次作为终止条件,可以看到各次计算的适应度值大致收敛于0.79,且40次迭代后适应度值变化不大,但若进行2000次迭代,是可以得到更优解的,如图5所示。同时,由于变异的随机性与小概率性,适应度值可能达到某一结果后,在若干次迭代中不发生改变,之后继续提高(类似于中世纪欧洲社会发展的停滞和文艺复兴),因此由各次迭代结果的相对值变化作为终止条件也是有局限性的。所以,增加迭代次数便有可能得到更优解,导致了迭代终止条件的不确定性。

图5 迭代2 000次结果
4 结束语
将遗传算法应用于阵列天线综合,解决了多约束条件下的阵列天线综合问题,在给定方向图的要求和阵列规模的条件下得到了较优解,并针对求解过程中的关键点进行了分析。尽管存在一些不足,但遗传算法仍不失为解决问题的一个方法,可以为寻找更优算法提供了一些经验和思路。
[1]ICHAEL JOHNSON J.YAHYA Rahmat Samii.Genetic algorithms in engineering electromagnetics.IEEE Trans AP:1997,39:7-21.
[2]翟孟云,严育林.阵列天线理论引导[M].国防工业出版社,1980.
[3]史永康.遗传算法在阵列天线方向图综合中的应用[J].遥测遥控,2010,31(2):15-19.
[4]李引凡.基于遗传算法的MF-HF天调调谐算法[J].无线电工程,2010,40(7):43-46.
