基于DSP的UPS电源在线控制技术研究
2011-05-11李杰辉
李杰辉
(民航中南空管局通信网络中心,广东广州510470)
随着现代网络技术和信息产业的进一步发展,供电中断带来的损失也变得越来越严重,对UPS电源的需求还将会进一步扩大。逆变器是UPS的核心,它必须具有输出高质量电压波形的能力。随着工业用高速数字信号处理器(DSP)的发展,正弦波逆变器的控制方案正由模拟控制向数字化控制的方向发展。
1 UPS逆变器的电路模型
在线式UPS一般采用桥式逆变电路,属于电压型逆变电源范畴。图1为典型的单相UPS的PWM逆变电路图。电路由单相半桥式逆变器、L-C滤波器和负载组成。图中Uo为逆变器的输出,Udc为直流母线电压,Lf和Rf分别是滤波电感的电感量和等效阻抗,Cf为滤波电容。
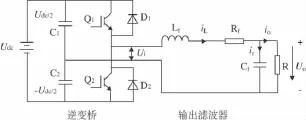
图1 单相半桥式逆变器电路模型
图1中给出了逆变环节输出的详细结构图,输出环节由BUS电容C1和 C2、功率管 Q1和 Q2、输出滤波电感Lf、输出滤波电容Cf组成。其中电容C1和 C2分别为正、负BUS电容,在正常工作时,它们的直流电压分别为+170 V和-170 V。
按输出电压极性有单极性SPWM和双极性SPWM之分。单极性是指在一个载波周期内,逆变桥的输出电压uab只有0和正电压或0和负电压;双极性是指一个载波周期内,逆变桥的输出电压uab既有正电压,又有负电压。
本系统的SPWM采用一组正弦双极性脉宽调制波形控制功率管Q1和Q2的开通、关断。Q1和Q2是交替开通和关断的,它们的工作状态是互补的。当Q1开通时,Q2必然处于关断状态,输出到电感Lo上的电压是+170 V的电压脉冲;反之,当Q1关断时,Q2必然开通,此时输出到电感Lo上的电压是-170 V的电压脉冲。这样,随着Q1和Q2的交替开断,就形成一组正弦脉宽调制波形,经过输出滤波电感Lo和滤波电容Cf,在负载端就会得到标准的正弦波形。
2 基于DSP的数字PWM产生机制
DSP要实现对逆变器的数字控制,关键是解决数字PWM的发生。模拟PWM是用三角波和控制信号进行比较产生的;数字PWM采用定时器和数字比较器来实现,其中定时器用来产生锯齿波或对称三角波,数字比较器决定输出信号的高低电平。上述两种方式实现的基本原理是一样的,但是数字PWM有其独特之处。
DSP芯片TMS320LF2406内部集成了对称和非对称的两种数字PWM发生模块。本系统采用的是对称PWM,其发生原理是:定时器1从0开始递增计数到周期值T1PR,接着从T1PR递减计数到0。然后开始下一个周期。对于高有效的那一路PWM输出口,当计数值上升到比较值CMPRx时,输出高电平;当计数值下降到比较值CMPRx时,则输出低电平;低有效的那一路与之互补。
为了避免逆变桥同一组桥臂的上下管共通,两路互补的PWM信号必须设置死区。死区可以通过外部模拟电路实现,也可以由DSP内部的死区发生模块设定。通过设定死区时间寄存器,TMS320LF2406可以实现从50 ns到102.4 μs的死区时间,它实际上是让每一路PWM的上升沿时刻延迟一个死区时间。必须指出的是:TMS320LF2406的全比较动作控制寄存器ACTR 决定了其输出引脚 PWMx(x=1,2,3,4,5,6)的性质,这六个引脚中的1,3,5分别与2,4,6共享一个比较寄存器CMPRx(x=1,2,3),所以一共可以产生三对互补的PWM信号。死区有效的前提是其中的1,3,5引脚被设置为高有效,对应的2,4,6引脚被设置为低有效。否则死区的设置非但不能起到应有的保护作用,而且会使一对本应互补的PWM信号发生重叠,直接造成破坏。
本文使用的DSP芯片TMS320LF2406的计数频率f0=40 MHz,逆变器的开关频率fc=16 kHz,若采用对称PWM方式其分辨率Dmin=2fc/f0=1/1 250,这样的PWM分辨率基本上可以满足UPS逆变器的控制精度要求。因此本文的逆变器控制采用了对称PWM方式。
3 基于DSP的UPS控制电路设计
本系统研究DSP控制的50 Hz l00 V UPS,核心控制芯片采用TMS320LF2406,这种DSP芯片是专门针对控制应用而设计的。TMS320LF2406具有高速信号处理和数字控制所必须的结构特点,能实现复杂控制算法,本系统依靠这一特点,用软件实现逆变重复控制算法。
3.1 UPS控制系统的结构
图2给出了DSP芯片TMS320LF2406控制实现在线式UPS的结构框图。仅用一片DSP就可以实现在线式UPS的四个功率变换环节:输入PFC环节、输出逆变环节、电池充电环节、电池升压环节,各个功率变换环节的控制是彼此独立的。由于DSP一条指令的时间50 ns,所以能用DSP实时处理电流环和电压环。
UPS的四个功率变换环节,总共需要6路信号反馈,分别是:输入电压、直流BUS正负电压、输出电压、输出电流、电池电压。DSP芯片内部集成了A/D转换模块,可以实现对上述6路信号的采样。DSP芯片的A/D转换模块分为两个,其中ADCO~ADC7在第一个模块,ADC8~ADC15在第二个模块,两个模块可以实现并行的转换。ADC1用于输入电压的检测;ADC0和 ADC3用于正负 BUS电容电压的检测;ADC14和ADC7用于输出电压、电流的检测;ADC4用于电池电压检测。
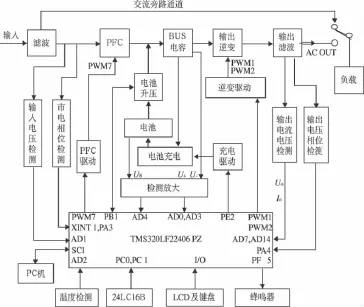
图2 DSP控制在线式UPS的结构
3.2 系统软件的设计
本系统根据输出电压及稳压值通过嵌入式重复控制和积分、比例控制复合控制算法来修正DSP中EVB模块中CMPRl中的正弦波幅值,从而控制开关管IGBT的占空比,达到控制输出电压的目的。本控制算法很好地解决了重复控制静差的问题和响应缓慢的不足,较好地满足了UPS不间断电源的要求。改进后的重复控制软件流程如图3所示。
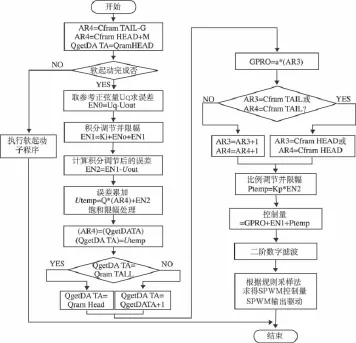
图3 软件流程图
图中CFramHEAD和CFramTAIL分别为重复控制器累加存储单元的头地址和尾地址指针,AR3为取数据地址指针,AR4为存数据地址指针,QramHEAD和QramTAIL分别为超前补偿存储单元的头和尾指针,QgetDATA为存放数据地址指针,G和M为超前补偿量,Ki为积分系数,Kp为比例系数,Q为二阶滤波因子,a为重复衰减常数,Temp,Ptemp和 GPRO为暂存单元。
4 实验结果与分析
在实验中,输入110 V 50 Hz的市电电压,BUS电压为170 V,输出滤波电容为4.7 μF,输出滤波电感为2 mH,负载为0~700 W的白炽灯;闭环控制器中前馈控制系数Kq=1,重复增益系数Kr=0.25,Q(Z-1)=0.95,比例控制系数 Kp=1,死区时间为 2 μs,采样频率为8 kHz。实验结果和波形如图4至图6。下面将对采用复合重复控制算法的逆变输出波形的动态响应过程逐一分析,可以看到采用比例、积分控制后波形的改进。
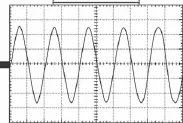
图4 UPS闭环空载输出电压波形
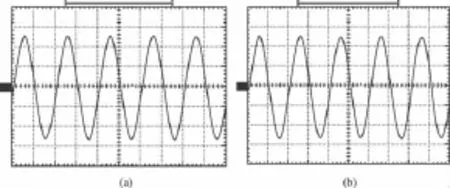
图5 闭环带载100 W输出电压波形及其与空载电压波形的叠加
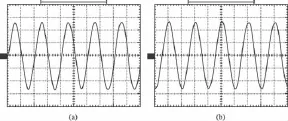
图6 闭环满载输出电压波形及其与空载电压波形的叠加
图4至图6捕捉到的示波器波形中,给出了逆变环重复控制的改进过程中输出电压波形加(减)载时的动态响应过程及稳态波形。图4为只有嵌入式重复控制算法时输出电压的动态响应过程,可以看出加(减)载瞬间超调量较大,恢复至稳态的过程较慢,且稳态误差较大(约为5 V)。为提高系统响应的快速性,加入比例调节器,如图5所示,可见加(减)载瞬间超调量明显变小,且恢复至稳态的过程加快,但仍存在稳态误差(约3 V)。下一步,为解决误差的问题加入积分调节器,如图6所示,加(减)载瞬间超调量更小,恢复至稳态的过程进一步加快,通过带不同负载时的稳态波形及空载、负载时的波形叠加可看到,两种情况下的稳态波形几乎达到了无静差,且波形畸变非常小。
由于仿真时的BUS电压采用恒定值,而实际系统中是通过PFC功率因数校正达到直流BUS电压稳压的目的,实际直流母线电压不是最理想的,当突加、减重载时,可能会引起母线电压的下垂,从而加剧逆变电源输出电压变化。所以本实验结果中的动态过程(如超调量、响应速度)与仿真结果相比仍有一定的差距,需要进一步改进。
5 结论
信息技术的巨大进步,推动了高可靠的逆变电源的发展。由于大量非线性负载的存在,使得用户对UPS的性能和结构有了越来越高的标准和要求。本文从实际出发,从数字化UPS的角度,对在线式UPS的设计和应用进行了研究和实验。结果表明:采用此控制方案在额定负载范围内输出特性良好,能获得稳定的50 Hz正弦电压,是一种高性能、低成本的控制系统。
[1]陈 坚.电力电子学——电力电子变换和控制技术[M].北京:高等教育出版社,2002.
[2]陈 宏,胡育文.针对逆变电源的重复控制器设计[J].机械制造与自动化,2002,(4):32-34,36.
[3]林新春,段善旭,康 勇,等.基于 DSP的UPS全数字化控制系统[J].电力电子技术,2001,(2):51-54.
[4]侯振义,王义明.UPS电路分析与维修[M].北京:科学出版社,2001.
[5]谢力华,苏彦民.正弦波逆变电源的数字控制技术[J].电力电子技术,2001,(12):52-57.
[6]郭卫农,段善旭,康 勇,等.电压型逆变器的无差拍控制技术研究[J].华中理工大学学报,2000,(6):30-33.
[7]胡雪梅,孙旭松.有源功率因数校正技术及发展[J].电气时代,2006,4:117.