基于红外光干涉技术的微纳结构内部三维形貌测量*
2011-05-06牛康康丑修建杜妙璇薛晨阳张文栋
牛康康,丑修建,杜妙璇,薛晨阳,张文栋
(中北大学电子测试技术国家重点实验室,太原 030051)
随着 MEMS(micro-electro mechenical systems)器件从研发阶段到产业化阶段的过渡,以及广阔应用领域的日益增加,对其性能测试的需求也越来越迫切。MEMS测试技术是 MEMS设计、仿真、制造及产品质量控制和性能评价的关键环节之一,其本身正经历着一个从二维平面到三维立体、从表面到内部、从静态到动态、从单参量到多参量耦合、从封装前到封装后的发展过程。
MEMS器件的微观形貌尺寸对其性能评价具有直接影响,能够更全面更真实的反映微器件及系统的特征和质量。微观形貌的测量方法有很多种,通常可分为接触式和非接触式两类。接触式测量容易损坏器件表面从而影响器件性能,同时触针可能变形和磨损,在某些高精微表面测量方面的应用受到限制。非接触式测量中以白光扫描干涉法发展应用最为广泛,其测量原理和系统是在 1980年由 Balasubramanian提出来的[1]。白光干涉测量技术具有量程大、非接触、灵敏度高、无损伤、精度高的特点,同时,白光干涉测量法能够解决单色光干涉测量中存在的2π相位模糊问题,因而更适用于阶跃式的和不连续的表面形貌测量[2-3]。
近年来,美国 Zygo公司和 Veeco公司、德国 Polytec公司及英国泰勒◦霍普森有限公司已生产出性能卓越的白光干涉仪,可以获得高分辨率的三维形貌。国内也开展了大量关于白光干涉测量方面的研究[4-6]。但是,目前的白光干涉仪器主要工作于可见光波段,只能用于微器件表面三维形貌测试,对于基于半导体材料的 MEMS器件内部结构细节还无法得知。本文利用红外光对 Si、GaAs等半导体材料相对透明的特性,将现有成熟的白光扫描干涉技术推广到红外光波段,通过红外光的透射干涉实现 MEMS器件内部形貌测量。本方法为封装后的微器件提供了一种有效的“内视”手段,为 MEMS微结构和器件工艺质量的快速检测技术提供了一种新方法。
1 测试原理
1.1 垂直扫描白光干涉原理
垂直扫描白光干涉测量利用了双光束白光干涉的特性,白光干涉时两列相干光波之间的允许光程差极小,而且干涉条纹数目极少。当产生干涉时,不同的波长各自产生一组条纹。在光程差为零的位置,不同波长的零级条纹完全重合使得光强达到最大值。随着光程差及干涉级数的增加,不同干涉条纹相互错开使得光强值逐渐减小,到一定程度时干涉条纹会自动消失[1]。基于白光的这种特性,光强值最大的零级条纹很容易与其它级次条纹相区别。当微位移平台带动被测器件进行垂直扫描运动时,不同的点会经过不同的零光程差位置,同时产生不同的干涉条纹。因此,可以利用白光的零级条纹来指示零光程差的位置,从而获得各点的相对高度,进而通过相应算法准确的重构出器件三维形貌。
1.2 红外光透射原理
当一束宽谱光经过半导体材料时,低于某个特定波长 λg的光将被半导体吸收,而高于该波长的光将透过半导体。这是由于半导体的本征吸收引起的,λg称为半导体的本征吸收波长。电子从价带激发到导带引起的吸收称为本征吸收。当一定波长的光照射到半导体上时,电子吸收光能从价带跃迁入导带。显然,要发生本征吸收,光子能量必须大于半导体的禁带宽度 Eg,即:

式中:h为普朗克常数;υ为光频率。

因此,波长大于 λg的光能透过半导体,而波长小于 λg的光将被半导体吸收。Si的禁带宽度为1.12 ev,最小透射波长为 1.10μm。
2 红外光干涉测试系统及算法
2.1 测试系统
图1所示为所设计红外光干涉系统结构示意图。系统采用 Linnik干涉结构,物镜放大倍数 40X,数值孔径 0.65。光源采用红外卤素光源,光谱范围1 100 nm~1 400 nm,在此波段对半导体材料具有良好的透射性能。通过 InGaAs红外 CCD采集干涉条纹,光谱响应范围 900 nm~1700 nm,像素 320×256,像元大小 30μm。红外光经过分光器(50∶50)后,一束到达参考镜,一束到达待测器件。两束光被参考镜和待测器件反射后沿原路返回,在 CCD阵列上产生干涉,形成干涉条纹。采用 PI公司的 P-622.ZCD微位移平台驱动被测器件进行垂直扫描,在测试表面的不同高度达到等光程形成干涉条纹,量程 250μm,分辨率 1 nm。将采集到的干涉图像输入计算机,采用 Matlab软件编制相应的干涉信号分析处理算法,实现三维形貌的还原。

图1 红外光干涉系统结构示意图
为了验证红外光干涉测试系统的透射测试性能,取两片同等厚度(约 400μm)的 Si晶片。一片置于待测器件上方,红外光透过 Si晶片后到达器件上表面。另一片置于参考镜前,用于补偿红外光透射器件上方 Si片所引起的光程差。图 1示出了两片半导体 Si晶片的位置。
2.2 三维形貌重构算法
白光干涉信号处理算法可分为以下两种:①通过分析光强值信息解算相对高度值:如重心法、垂直扫描法;②通过解算相位信息提取相对高度值:如空间频域算法、移相法、包络线拟合法。在干涉系统光路结构、扫描机构、光源光谱宽度等已经确定的情况下,零光程差点的定位精度直接决定于干涉信号处理算法。如果直接采用干涉信号的极大值作为零光程差点,则其定位精度容易受到光源波动及噪声影响,同时需要很高的采样率,会大大影响测试精度和效率[7]。为了提高测试精度、提高运算速度和减小计算量,本文采用将干涉条纹对比度最大值判别与五步相移法[8]结合的算法实现对微器件形貌的透射测试[6]。在被测器件垂直扫描移动过程中,根据式(4)计算得出相邻五帧 CCD各个不同像素点的调制度值。当调制度达到最大值时,记录微位移平台的移动步数 N,根据式(6)计算得出相移变化量 Δφ,最后根据式(5)得到被测器件不同点的高度值。
白光干涉条纹的光强度值可表示为[9]:

式中:I0(x,y,z)为直流光强;C(x,y,z)为干涉条纹调制度函数,其峰值为两相干光束达到零光程差的位置;φ(x,y,z)为两相干光束相位差。
五步相移算法干涉条纹调制度计算式为[10]:

式中:I1,I2,I3,I4,I5分别为五帧干涉图的光强。
器件表面各点高度值可表示为:

式中:N为调制度达到最大值时微位移平台移动的步数;λ0为光源中心波长;Δφ由五帧相移算法计算[11]。

3 实验结果分析与讨论
测试器件为北京大学微电子研究所设计加工的三层台阶结构样品。通过三次刻蚀形成三层台阶,为了增加台阶处的反射率,镀一层厚度约为 300 nm的 Au层。使用 JSM-7500F扫描电子显微镜对器件进行了测试。图 2所示为器件 SEM图,三个台阶高度分别为 A:1.00μm,B:0.66μm和 C:0.16μm。
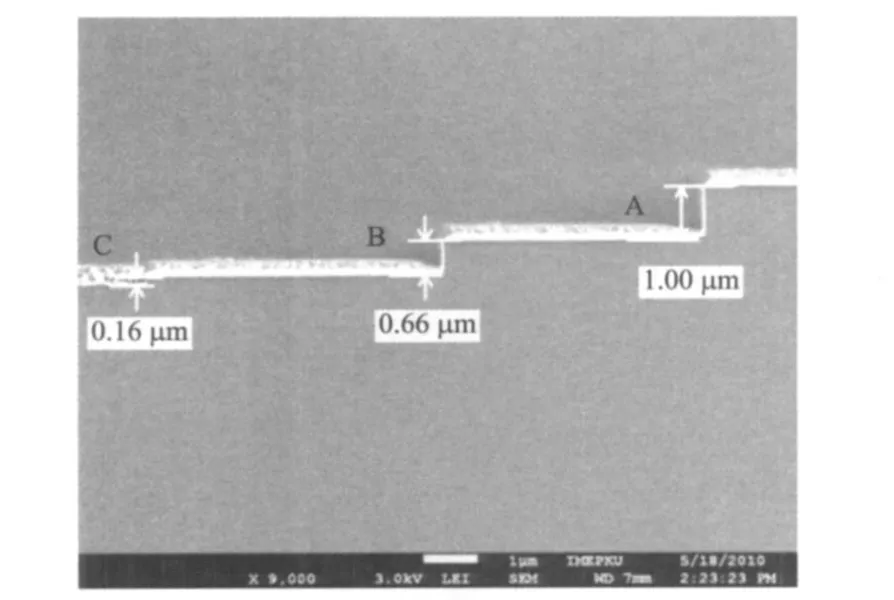
图2 测试样品SEM图
为了验证本红外光干涉系统的性能,首先使用德国 Polytec公司生产的微系统测试分析仪 MSA 400(Micro System Analyzer)对器件表面进行了非透射形貌测试。选用 50X白光干涉镜头,显微镜下视场大小为 0.179mm×0.134mm,分辨率为 0.129μm×0.129 μm。曝光时间为 1/120 s,计算方法选用相干相位法。图 3为测试所得三维形貌和截面图,台阶高度分别为 A:1.013 7 μm,B:0.6780μm,和 C:0.164 7μm。
接下来采用本红外光干涉系统对微器件进行透射形貌测试。对干涉图进行处理分析,图 4为微器件在扫描过程中某点的干涉相干图。从图中可以看出,红外光干涉条纹的光强是正弦变化的,具有与白光(可见光波段)干涉光强相同的变化特征。在扫描过程中,当光程差为零时光强具有最大值,条纹对比度变化剧烈,零级条纹极易与其它次级条纹相区别,可以很容易确定零光程差的位置。


图5(a)所示为利用红外光干涉系统透射测试所得的微器件三维形貌图,(b)所示为像素 y=60处的台阶截面图。同 SEM图和 MSA 400测试结果相一致,具有较好的三层台阶结构。台阶高度分别为 A:1.014 2μm,B:0.681 8μm和 C:0.167 2μm。图 5(b)左侧第一个台阶处出现了突跳,应为光的衍射效应引起[2,12],属于白光干涉法测量的常见现象。
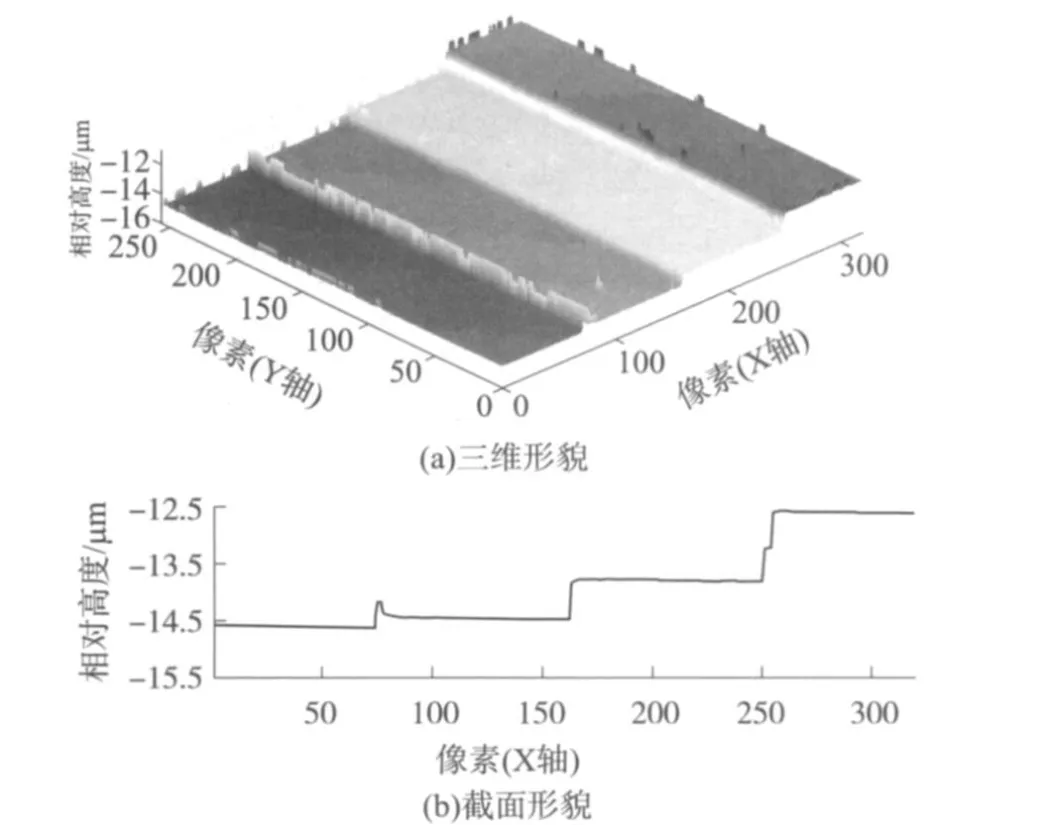
图5 红外光干涉系统测试结果
表1列出了不同测试方法所得台阶相对高度同SEM测试结果的相对误差。采用 MSA 400测试产生的台阶高度误差分别为 1.37%,2.73%,2.94%,采用红外光干涉系统透射测试产生的台阶高度误差分别为 1.42%,3.30%,4.50%。测试结果证明,红外光垂直扫描干涉方法可以满足高精度的测量要求,能够准确实现微器件内部形貌的透射重构。同国外的商业化仪器 MSA 400相比,测试误差控制在同一数量级,具有较高的精确度。

表1 测试结果比较
4 结论
将红外光透射半导体材料特性和白光扫描干涉方法相结合,设计研制了红外光干涉系统,实现了微器件三维形貌透射测试。将透射测试结果同 SEM和 MSA 400表面测试结果进行了比较分析,该方法可实现对百 nm量级台阶高度的精确透射测试,误差为 4.5 0%。同目前的白光干涉测量仪器相比,该方法可用于测试基于 S i、G a A s等非透明半导体材料的 M E M S器件内部结构特征,检查封装后 M E M S器件的内部缺陷等。
[1]Lee B S,Strand T C.Profilometry with a Coherence Scanning Microscope[J].Applied Optics,1990,29(26):3784-3788.
[2]Roy M,Schmit J,Hariharan P.White-Light Interference Microscopy:Minimization of Spurious Diffraction Effectsby Geometric Phase-Shifting[J].Optics Express,2009.17(6):4495-4499.
[3]Thomas D,Gerd H,Holger V.Three Dimensional Sensing of Rough Surfacesby Coherence Radar[J].Applied Optics,1992,31(7):919-9251.
[4]李新弘,章海军,张冬仙.基于白光干涉的自稳定定量相位成像系统[J].光学学报,2008,28(7):1279-1282.
[5]杨军,苑立波.白光干涉双环传感网络理论与实验研究[J].光学学报,2005,25(6):731-736.
[6]戴蓉,谢铁邦,常素萍.垂直扫描白光干涉表面三维形貌测量系统[J].光学技术,2006,32(4):545-552.
[7]李其德,卢荣胜.白光扫描干涉测量算法[J].科学仪器与装置,2008,4:78-81.
[8]Stoilov G,Dragcstinov T.Phase-Stepping Interferometry:Five-Frame Algorithm with an Arbitrary Step[J].Optics and Lasers in Engineering,1997,(28):61-69.
[9]Nikolaidis N,Pitas I.Robust Image Watermarking in the Spatial Domain[J].Signal Process,1998,66(3):385-403.
[10]Nikolaidis A,Pitas I.Asymptotically Optimal Detection for Additive Watermarking in the DCT and DWT Domains[J].IEEE Transactions on IP,2003,12(5):563-571.
[11]Wang Y,Doherty J.A Wavelet-Based Watermarking Algorithm for Ownership Verification of Digital Images[J].IEEE Transactions on IP,2002,11(2):77-88.
[12]Harasaki A,Wyant JC.Fringe Modulation Skewing Effectin White Light Vertical Scanning Interferometer[J].Appl Opt,2000,39(13):2101-2106.