DCL2-32型连续式捣固车连续作业模式拨道修正值分析
2011-05-04潘亚嘉刘三忠
王 胜,潘亚嘉,丁 坤,刘三忠
(西南交通大学 机械工程学院,成都 610031)
襄樊金鹰轨道车辆有限公司生产的DCL2-32型捣固车有连续作业模式和步进作业模式,在连续作业模式下,需要实时检测C点检测小车与A,B,D点检测小车的相对位移关系,用以计算修正值。本文重点介绍连续作业模式下的四点法检测拨道修正值计算模型。
1 B点偏离对C点矢距的影响
连续式捣固车在连续作业模式下,主车连续走行,捣固小车步进走行,主车上的A,B,D点检测小车间的相对位置不发生改变,C点检测小车与A,B,D点检测小车间的相对位置时刻变化。如图1所示,假设在拨道的瞬间,C点小车偏离静态位置的距离为Δx。

图1 连续作业模式下四点法检测
设C点检测小车到C'时,B,C点检测小车测量的矢距分别为 H'2,H'1,则有K'B定义为连续作业模式下B点偏离对C点矢距的影响系数。
2 D点偏离对C点矢距影响
如图2所示,点划线表示正确的轨道位置,实线段AB为整正后的线路,实线段BD为未整正的线路。C点的矢距随C点的位置变化而变化,小车由C点移动Δx到 C',C点矢距为 H1,C'点矢距为 H'1,B 点矢距为H2,D点偏移距离为 FD,C'点残留偏差为F'C,拨道作业只能将轨道移动到虚线位置。

图2 四点法检测连续作业模式的偏差分析
偏差F'C可由下列方程组求出
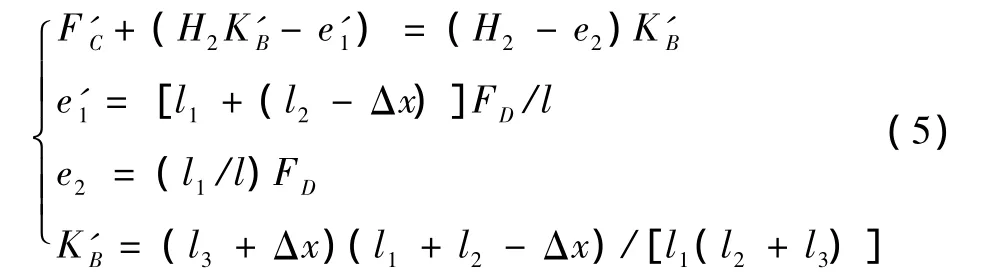
如图2,式(5)中,e'1为连续作业模式下D点偏移对C'矢距的影响量;e'1为连续作业模式下D点偏移对B点矢距的影响量。
解方程组式(5)得出

3 拨道过程数学模型
如图3所示,连续作业模式下四点法检测拨道有以下规律:D点检测小车处于未整正曲线上,C点检测小车处于即将拨动的轨道上,A,B点检测小车处于已整正的曲线上,A,B,D点检测小车间相对位置固定,C点检测小车与A,B,D点检测小车间有相对运动。

图3 连续作业模式下四点法检测拨道数学模型
如图3所示,C点检测小车与 A,B,D点检测小车间产生相对位移Δx时,以C'横坐标为X轴建立直角坐标系,F(x)为未经整正的线路曲线,f(x)为经过整正的线路曲线,建立方程有

又H1'=H2'KB',将式(8)及式(9)代入整理得


可以看出,捣固车拨道过程是根据拨道前的线路线型F(x)求拨道后的线路线型f(x)。
4 修正值计算模型
拨道修正,即根据作业方向上各检测点所处位置的钢轨线型,计算出各检测点偏离圆曲线的大小对C点的理论影响值,然后对实测的拨道量进行修正。
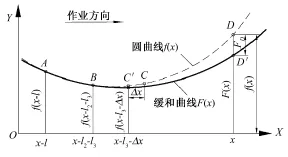
图4 连续作业模式下四点法检测拨道修正值计算
如图4所示,捣固车连续作业模式下四点法检测拨道时,A,B,C三点处于圆曲线上,C点与 A,B,D 点间有相对运动,对应D点的D'点在缓和曲线上,D点偏移量FD为

设FD对C点矢距的影响值为V4'(C点的修正值)为

又根据式(12)推得

将式(15)代入式(14),得出连续作业模式下四点法检测拨道时修正值计算的数学模型V'4为

同理写出连续作业模式下三点法检测拨道时修正值计算的数学模型V'3为

式中,K'3D、K'3B分别是三点法检测时 D,B点对 C'点矢距的偏离影响系数,其值为

5 总结
在曲率变化的缓和曲线上以及线型变更点处,需要针对不同的线型计算拨道量的修正值,要求出连续作业模式下不同线型处单弦法检测拨道修正值的计算方程式,包括在有缓和曲线的直缓点、缓圆点、圆缓点、缓直点四种线型变更点处的修正值计算方程,以及在无缓和曲线的直圆点、圆直点处修正值计算方程,只需将各检测点的线型方程式代入修正值计算的数学模型计算拨道修正值。
[1]韩志清,唐定全.抄平起拨道捣固车[M].北京:中国铁道出版社,1996:137-150.
[2]蒋刚.D09-32型连续式捣固车拨道原理分析[J].铁道建筑,2008(10):107-109.
[3]谢寅山.D09-32连续式捣固车工作小车的拨道补偿数学几何原理[J].科技情报开发与经济,2008(21):134-136.
