GPS/SINS组合导航系统的多尺度融合算法研究
2011-04-26林雪原
林雪原
(海军航空工程学院电子信息工程系 山东 烟台 264001)
多尺度分析理论以小波变换理论为基础,融合了小波理论[1]和卡尔曼滤波[2]的优点。该理论最早在目标跟踪领域内进行研究[3-4],并取得了一系列的研究成果。近年来,国内外学者开始研究多尺度融合理论在导航系统中的应用[5-7]。文献[7]提出将量测信息用小波进行最低尺度的预处理,进而引入到组合导航系统中。然而当分解尺度较大时,将会丢掉系统的某些动态信息。文献[8]对惯性元件输出信号进行频谱分析,确定相应的多分辨分析尺度以及不同尺度下对高频系数采取的相应措施,然后对噪声占主要成分的尺度的高频系数全部置零,对噪声和有用信号共同占有的尺度的高频系数作阈值处理,进而提高导航精度。但由于小波降噪需要花费一定的时间,因此组合导航系统的实时性会受到影响。
为此,本文利用多尺度分析思想,首先在某一尺度N(原始尺度或最细尺度)上给出系统的状态方程与量测方程,然后利用小波变换将系统状态方程与量测方程在不同尺度上进行分解,并在每个尺度上进行卡尔曼滤波以对系统的状态进行估计,在得到多个不同尺度估计值的基础上,进行有效的数据融合以得到全局最优估计。相对于几种常见的滤波算法,该方法稳定,可有效地提高系统的精度。
1 多尺度系统描述


2 多尺度融合算法模型的建立


3 基于多尺度的组合导航系统实验
本文采用SINS的误差方程作为系统的状态方程,导航坐标系选用北东地坐标系,在忽略高度通道的情况下,通过对SINS系统的性能及误差源的分析,可以获得系统的误差方程为[2]:

式中,H为4×10维矩阵;v(t)为量测噪声矩阵[2]。

在基于本文研究方案的系统实验中,采用db4小波且分解层数为4以对GPS进行在线小波多尺度预处理。实验结果没有列出航向角误差曲线的原因是由于状态方程中航向信息的可观测性较弱。

图1 俯仰角误差曲线
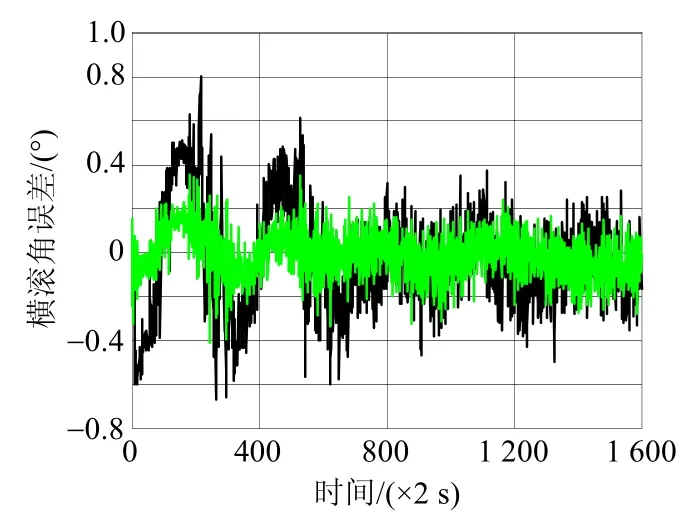
图2 横滚角误差曲线

图3 经度误差曲线

图4 纬度误差曲线
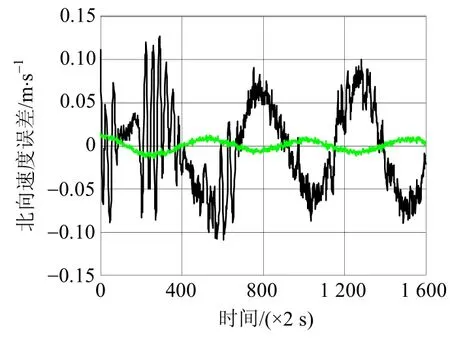
图5 北向速度误差曲线

图6 东向速度误差曲线
实验时采用的步骤如下:1) 建立系统的原始状态方程与观测方程;2) 将上述方程依次分解到尺度i(1≤i≤N)上;3)根据式(13)~式(18)在尺度i进行常规卡尔曼滤波;4) 根据式(11)~式(12)进行全局信息最优估计,并对SINS进行反馈校正。
从上述实验误差曲线可以看出,本文方法具有明显的优越性。文献[7]提出了一种将系统模型递归得到最低尺度1的组合导航系统信息融合模型,并且理论仿真结果证明其滤波效果优于常规卡尔曼滤波。为此,本文以上述实验原始数据为基础又进行了基于文献[7]算法的组合导航系统实验。在基于本文滤波算法、文献[7]滤波算法以及常规卡尔曼滤波算法条件下,表1给出了各导航参数误差的均方根。
从表1可以看出,本文的算法相对于常规卡尔曼滤波算法以及文献[7]的算法具有较大的优越性。

表1 实验结果误差均方根比较
本文进行了理论动态仿真实验,以验证本文算法的完整性。由于实际的动态实验不像静态实验可以在固定转台上进行(即有姿态、位置、速度参考点),从实际的动态实验看不出本文算法的有效性。为此,本文进行了动态理论仿真实验,系统结构如图7所示。该系统仿真时间长600 s,采用的仿真轨迹由加速、爬升、平直飞行、转弯,以及进一步爬升、下滑,最后进行盘旋状态构成。飞行器的初始航向角为90°,初始俯仰角及横滚角均为0°,初始位置为东经118°和北纬29°,高度50 m,MEMS陀螺漂移为0.5(°)/s、白噪声误差为0.5(°)/s,MEMS加速度计漂移为10−3g,采样周期为0.02 ms。假设GPS的定位误差为8 m(1σ),测速误差为0.5 m/s,采样周期为1 s。
目前,基于统计线性化的非线性系统直接滤波方法在组合导航系统中表现出其特有的优势,其中以Sigma-Point(简称CDKF滤波)[11]为代表。为此,本文基于相同的仿真原始数据进行了针对本文方法与Sigma-Point方法的组合导航系统仿真实验。两者的位置误差与姿态误差(滤波后的导航参数与仿真的真值之差)曲线如图8~图12所示。基于本文算法、CDKF滤波以及常规卡尔曼滤波的系统滤波时间对比图如图13所示。

图7 基于多尺度融合的组合导航仿真系统结构图
针对文献[8]的算法,本文对惯性元件的输出信号进行尺度为3的小波消噪处理(进行滑动窗口式滤波时,选取信号宽度N=200)。在同样条件下的仿真结果表明,其定位结果精度与本文的算法基本相当,但是其平均滤波周期为1.698 9 s,根据上述条件可知,其实时性受到影响。表2给出了基于CDKF以及本文算法的各导航参数误差的均方根。

图8 经度位置误差曲线

图9 纬度位置误差曲线

图10 横滚角误差曲线

图11 俯仰角误差曲线

图12 航向角误差曲线
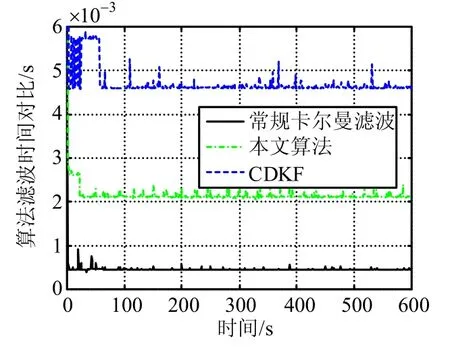
图13 各算法滤波时间对比
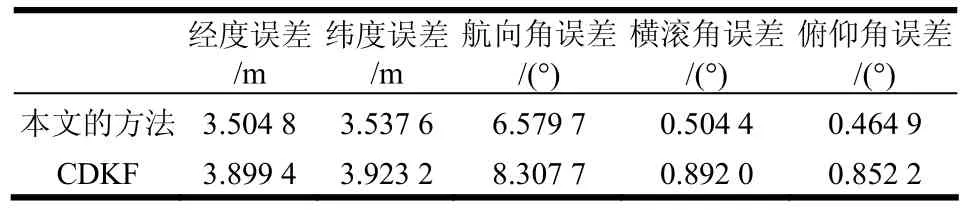
表2 实验结果误差均方差比较
4 结 论
本文根据多尺度分析理论,研究了基于多尺度融合估计理论的组合导航系统,将其应用于GPS/SINS组合导航系统中,并给出了实验步骤,进行了相应的实际静态实验与动态理论仿真实验,并给出了实验曲线。
从计算结果可以看出:1) 在不增加计算量的数量级的情况下,在GPS/SINS组合导航系统中引入多尺度状态融合技术,能够显著地提高组合导航系统的导航参数精度,因此,该算法是提高组合导航系统精度的有效方法。2) 本文以实验为基础,加大小波分解的层数,然后重新实验,发现上述各导航参数的误差将会进一步降低,但会增加系统的复杂性。3) 在多尺度分解过程中,尺度过高会使系统解算时间过长,因此,在实际应用中应该综合考虑系统精度与系统复杂性之间的关系。
[1] 孙延奎. 小波分析及其应用[M]. 北京: 机械工业出版社,2005.SUN Yan-kui. Wavelet analysis and its application[M].Beijing: China Machine Press, 2005.
[2] 袁信, 俞济祥, 陈哲. 导航系统[M]. 北京: 航空工业出版社,1993.YUAN Xin, YU Ji-xiang, CHEN Zhe. Navigation system[M]. Beijing: Aviation Industry Press, 1993.
[3] 郑容, 文成林, 施晨鸣, 等. 多分辨率多模型机动目标跟踪[J]. 电子学报, 1998, 26(12): 115-117.ZHENG Rong, WEN Cheng-lin, SHI Chen-ming.Multiresolutional multiple model maneuver target tracking[J]. Acta Electronica Sinica, 1998, 26(12): 115-117.
[4] 闫莉萍, 刘宝生, 周东华. 一类多速率多传感器系统的状态融合估计算法[J]. 电子与信息学报,2007,29(2):443-446.YAN Li-ping, LIU Bao-sheng, ZHOU Dong-hua. A class of state fusion estimation algorithm for multirate multisensor systems[J]. Journal of Electronics Information Technology, 2007, 29(2): 443-446.
[5] NASSAR S, NASER E S. Wavelet analysis for improving ins and ins/gps navigation accuracy[J]. The Journal of Navigation, 2005, 58: 119-134.
[6] NASER E S, NASSAR S. Wavelet de-noising for IMU alignment[J]. IEEE A&E System, 2004, 10: 32-38.
[7] 周雪梅, 苏丽, 吴俊伟. 多尺度递归融合估计在组合导航系统中的应用[J]. 中国惯性技术学报, 2009, 17(1): 59-62.ZHOU Xue-mei, SU Li, WU Jun-wei. Application of multiscale resursive fusion estimation in integrated navigation system[J]. Journal of Chinese Inertial Technology,2009, 17(1): 59-62.
[8] 吴富海, 杨元喜. 基于小波阈值自适应滤波的GPS/SINS组合导航[J]. 测绘学报, 2007, 36(2): 124-128.WU Fu-mei, YANG Yuan-xi. GPS/INS integrated navigation by adaptive filtering based on wavelet threshold de-noising[J]. Acta Geodaetica ET Cartographica Sinica,2007, 36(2): 124-128.
[9] 文成林, 周东华. 多尺度估计理论及其应用[M]. 北京:清华大学出版社, 2002.WEN Cheng-lin, ZHOU Dong-hua. Multi-scale estimation theory and its application[M]. Beijing: Tsinghua University Press, 2002.
[10] 林雪原, 田淑荣, 闫立东. GPS小波去噪的误差方差建模技术与实验[J]. 海军航空工程学院学报, 2009, 24(4):361-364.LIN Xue-yuan, TIAN Shu-rong, YAN Li-dong. Technique and test of error variance modeling of gps’s reducing noise using wavelet transform[J]. Journal of Naval Aeronautical and Astronautical University, 2009, 24 (4): 361-364.
[11] 李荣冰, 刘建业, 赖际舟, 等. 惯性组合导航系统Sigma-Point直接式卡尔曼滤波算法[J]. 控制与决策,2009, 24 (7): 1018-1022.LI Rong-bing, LIU Jian-ye, LAI Ji-zhou, et al. Sigma-point direct kalman filtering algorithm for inertial integrated navigation system[J]. Control and Decision, 2009, 24(7):1018-1022.