清洗地膜污水处理自动控制系统的研究
2011-04-26郭亮,鹿剑
郭 亮, 鹿 剑
(1.新疆产品质量监督检验研究院,新疆 乌鲁木齐 830017;2.新疆特种设备检验研究院,新疆 乌鲁木齐 830000)
0 引 言
由于新疆维吾尔自治区的农业生产基本实现了机械化以及新疆自身的气候原因,所以地膜在新疆农业生产中被广泛使用。以前对于使用后地膜的处理方法通常为直接翻入土中,近年来地膜的白色污染问题逐渐被重视,政府规定地膜必须强制回收处理,其处理途径通常为经过清洗后进行再融化造粒从而用来生产塑料制品。
经过调查,发现新疆的地膜清洗企业现在的工作方式全部为人工清水直接清洗,清洗后的污水直接排放,生产率很低并耗费大量水资源,由于回收的地膜中含有大量农药残留,清洗后的污水经排放对环境造成了严重的污染。针对这种情况,该文提出了在地膜清洗厂增设一套水处理自动控制系统,将地膜清洗污水经过净化处理反复使用,尽量做到零排放,从而起到节能减排同时降低成本的效果。
在清洗厂的水处理系统中采用自动控制技术,不仅可以提高系统的性能、生产率、可靠性,而且还可以增加系统的稳定性、降低操作成本、加快启动过程等。由于水处理过程是较复杂的连续批量生产过程,既有现场设备的运行协调,又有大量的现场数据采集和处理,同时各功能单元地理位置分散,相互间由管道或管网互连。针对控制要求,该文提出了基于DCS控制技术,以下位机PLC为控制中心,利用变频控制技术与现场总线技术构建现代化水处理控制系统的设计思想[1-2]。
1 污水处理过程控制要求
污水处理设备的首要任务就是保证出水水质稳定、合格,达到二次洗涤使用的标准,同时降低吨位水处理成本。在污水处理设备设计和操作运行过程中需要考虑以下4点:
(1)生产率。改进操作方式,提高单元过程污水处理量的能力。
(2)可靠性。降低过程故障发生率,特别是保证干扰事件(干旱、暴雨)情况下污水处理设备正常运行。
(3)稳定性。当过程出现高度稳定性时,偶尔的干扰可能会对出水水质产生严重影响,但通过控制技术可以避免干旱、暴雨等事件的影响。
(4)操作费用。减少能源损耗,降低生产成本。考虑收纳水体的动态特性,施加控制,匹配收纳水体的同化能力。
2 系统结构及功能
2.1 系统结构
根据污水处理过程的工艺特点及控制要求,针对该清洗厂投资小、占地少等特点,系统采用了PC+PLC分级分布式控制形式。通过主从PLC相结合的控制结构,通过现场总线实现低成本通信,并且提高系统安全性和可靠性,实现分布式控制的目的。把整个自动控制系统按照分布式系统结构分为3层:中央控制层(操作站或上位机)、现场控制层(下位机)和现场执行层,系统基本结构如图1所示[3]。

图1 系统基本结构图
2.1.1 中央控制层
基于组态软件的中央控制室计算机监控系统。上位机与PLC之间采用组态软件的驱动程序进行数据通信,完成数据采集、处理、监督及控制功能。
2.1.2 中间控制层
采用一台西门子S7-300PLC作为中央控制单元主PLC,通过MPI卡与中央控制层PC机联系,每一个驱动程序都是一个COM对象。通信程序与组态软件之间组成一个完整的系统,与现场仪表通过RS485通信口直接通信,传输距离可达50m,满足现场需要,保证系统高效运行。
2.1.3 现场执行层
分布在污水处理现场的就地分控站,其现场控制单元PLC负责采集各设备的工作状态信号,并通过现场CAN总线送给主PLC。主PLC完成对各分站信息的采集、运算、控制等功能并向分站发出控制命令,同时与中央控制层交换工艺数据及控制指令,控制命令送至各分站以后,通过各输出模块完成对现场设备的控制。
2.2 系统功能
系统功能主要包括以下3个方面:
(1)数据采集和设备控制。数据采集主要完成对现场各种工艺参数的检测,如pH值、电机状态、污水浓度、液位、加药量等并将其传送至控制层,设备控制主要完成对现场各种工作设备如水泵、排泥机、加药泵等的各种控制。
(2)过程控制。过程控制回路主要完成污水提升泵站自整定PID控制技术、浮选、加药控制以及液位自动控制。
(3)工艺过程监视。该监控系统采用北京亚控科技有限公司的组态王6.0组态软件,该软件采用了多线程、COM组件等新技术,实现了实时多任务,软件运行稳定可靠。
监控操作画面分多屏,包括方便工人操作的监控画面、为软件工程师提供接口的整定画面、形象直观的模拟画面、易于统计的参数画面、便于追查事故原因的历史趋势画面、提供技术分析信息的实时曲线画面以及报警窗口,此外,还可以实现历史记录的储存和报表的打印。
3 关键控制技术
污水处理的特点要求控制系统必须能够兼顾流程和单元控制。流程控制与系统的工艺流程相关,而计算机控制的基础是单元控制,是实现系统优化控制的条件。根据工艺要求,重点研究了污水提升泵站和浮选加药环节的控制系统。
3.1 污水提升泵站PID控制技术
泵站工艺要求:
(1)污水提升泵启动速度快,保证污水全部进入处理系统;
(2)泵房集水井水位可在一定范围内变化;
(3)3台提升泵负荷平均分配,在闲时可关闭1~2台。
近年来基于PID算法的泵站控制方式得到了广泛关注,该方法结构简单,使用时不需要确定精确的系统模型,控制精度高,响应速度快,适合用于控制系统负荷变化大、容量滞后大、对控制质量要求又比较高的场合。该系统采用PID变频调速方法对泵站进行控制[4],结构框图如图2所示。
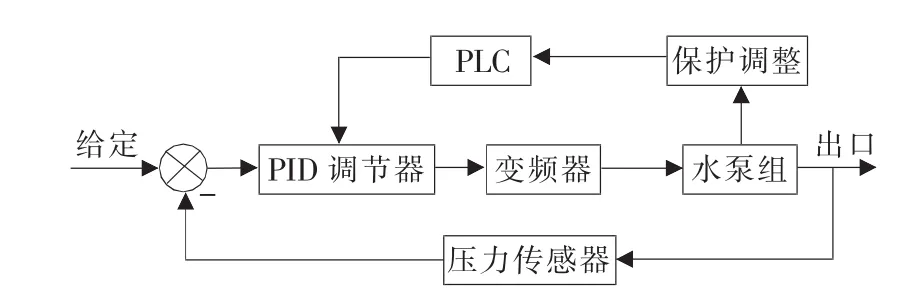
图2 泵站控制系统框图
3台水泵由1台小污水提升泵和2台大污水提升泵组成,利用1台变频器控制2台大水泵(2#、3#水泵),小水泵(1#泵)始终处于工频电源运行状态。系统工作时首先投入1#泵和2#泵,2#泵工作在变频工作状态,随着集水井水位的变化可调节变频器输出频率以保证水位不超过警戒水位。当水位超高时,2#泵自动切换到工频电源运行,并向PLC发出信号,继而变频启动3#泵,对水位进行调节。
3.2 浮选加药自整定PID控制技术
浮选加药是污水处理系统工艺控制的关键,直接关系到污水处理效果和处理成本。
根据处理设备具体需要,该系统采用了药剂流量、出口浊度双闭环控制系统,利用PID控制调节加药量,从而提高控制质量[5]。该部分结构框图如图3所示。
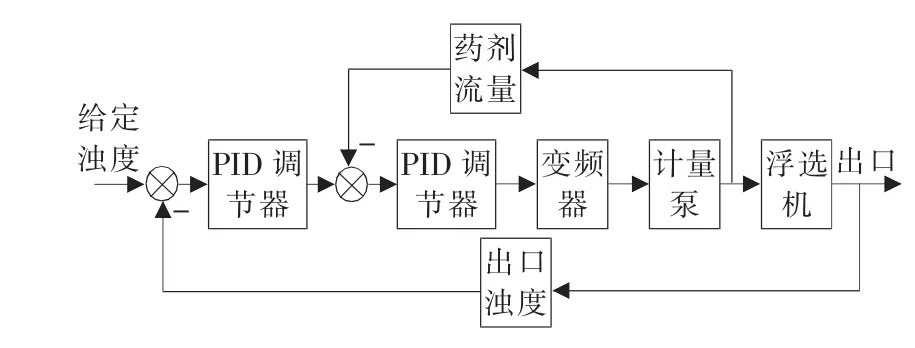
图3 浮选加药控制系统框图
PID控制器是一种比例、积分、微分并联控制器,工作原理可用式(1)表示

式中:u(t)——控制器输出;
e(t)——控制器输入,即偏差信号;
kp,Ti,Td——控制器的比例系数、积分系数、微分系数。
该系统采用S7-300PLC内部的SFB41“CONT_C”连续控制功能模块,利用FC105功能模块接受一个IN,并将其转化为介于LO_LIM与HI_LIM之间的实型值,通过模拟量输入输出模块持续接受输入变量并发出输出变量对过程进行控制。可使用Matlab提供的Simulink可以对动态系统进行建模、仿真和分析,其子模型库中的功能模块可以直观地设计系统模型,仿真时可以选择仿真步长、各种数值算法等参数,并可以将仿真结果动态显示。
针对式(1)描述的偏差控制药剂流量过程的PID控制规则使用Matlab的m语言进行编程,表达为Simulink可以调用的S函数,并对其进行封装,使其成为图形化的控制模块(具体方法可参见文献[6]和文献[7])。最后确定,流量环 kp=18.4,Ti=0,Td=13.2,浊度环kp=55.4,Ti=0.7,Td=0,基本可使系统达到理想的控制效果。
同时,应注意在启动阶段,各电机不能进行PID调节,以防出现震荡。
4 结束语
实现水处理自动化的目的是节能减排、提高工作人员的劳动生产率,该系统采用“EIC三电一体化”计算机集散控制技术,以PLC控制的自动控制系统代替原有的人工控制以及继电器控制,具有较高的自动化程度,运行可靠,可维护性好,兼具一定的灵活性,可以极大地降低投资成本,减小劳动强度。
经过试验统计得出,使用自动控制的水处理系统后的每吨地膜清洗成本可以降至原生产成本的60%左右,大大降低了生产成本,提高了企业的市场竞争力。
[1] 温盛军.基于PLC的水厂源水处理自动控制系统[J].重庆科技学院学报:自然科学版,2008,10(1):69-72.
[2] 江琳,李宏.基于PLC的电解电源监控系统设计[J].电子设计工程,2009,17(2):75-76.
[3] 毛慧欧.城市污水处理计算机控制系统的应用研究[J].环境污染治理技术与设备,2001,5(2):32-36.
[4] 周志敏.变频调速系统设计与维护[M].北京:中国电力出版社,2007.
[5]郭照新.PLC在一体化反应器污水处理系统中的应用[J].微计算机信息,2006(5):29-33.
[6] 姚俊,马松辉.Simulink建模与仿真[M].西安:西安电子科技大学出版社,2002.
[7] 吴晓莉,林哲辉.Matlab辅助模糊控制系统设计[M].西安:西安电子科技大学出版社,2002.
