干式DCT单离合器执行机构变结构伺服控制
2011-04-25眭加彩赵治国
眭加彩 赵治国
(同济大学汽车学院,上海 210804)
1 引言
双离合器自动变速箱DCT(Dual Clutch Transmission,简称DCT)因其可以保证换档过程中动力输出不中断而成为国内外研究的热点。由于干式双离合器执行机构的伺服控制系统存在强非线性,主要体现在膜片弹簧的非线性和直流电机本身的非线性,使得离合器执行电机的伺服控制精度难以保证。赵和平、赵永胜、吴光强等[1-3]对采用无刷直流电机的离合器执行机构,设计了三阶变结构控制器,并分析了变结构控制器对系统参数扰动的鲁棒性,取得了较好的仿真效果。但是这些控制器的控制输入量包含分离轴承位置传感器信号的三阶微分以及电机的负载转矩项,工程实现困难。
本文以有刷直流电机作为离合器执行机构的动力源,建立了干式电动双离合器执行机构的动力学模型,并详细给出了电机转子等效负载转矩的计算方法。针对执行机构的强非线性,设计了两阶变结构伺服控制器。仿真表明,该控制器具有很高的跟踪精度。此外,该控制器的控制输入量只包含分离轴承位置传感器信号的一阶微分,具有很强的工程应用价值。
2 干式DCT离合器执行机构建模
图1为干式DCT离合器的执行机构示意图。它由直流电机,螺旋传动机构,螺旋助力弹簧,液压传动机构,膜片弹簧及其压盘组成。其中螺旋传动机构采用螺杆旋转、螺母移动的方式,把电机的旋转运动转换成螺母的直线运动,再由螺母推动与其固结的活塞推杆,使工作腔里的液压油增压或减压,从而使得分离轴承推动或松开膜片弹簧的分离指,实现离合器压盘的接合或分离。
由于螺旋传动机构具有自锁特性,使得向离合器分离轴承方向简化并建立动力学模型变得困难,因此,本文将采用往直流电机转子方向简化的方式,同时给出电机转子等效负载转矩的计算方法。
2.1 直流电机模型
直流电机模型可简化为图2所示的等效电路。根据基尔霍夫定律定理,建立电机模型。
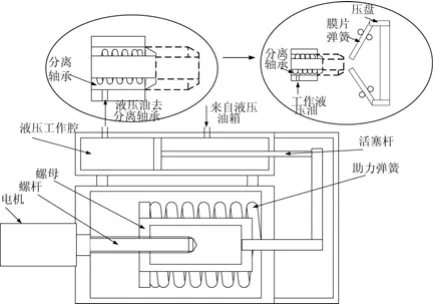
图1 离合器执行机构示意图
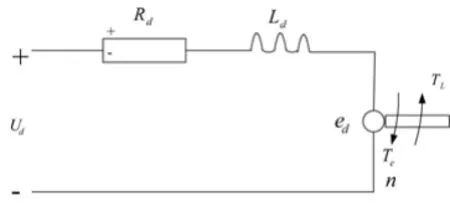
图2 直流电机模型
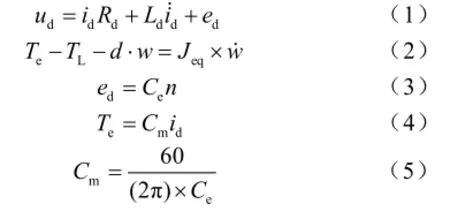
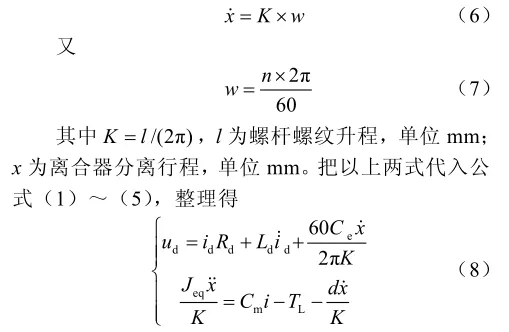
其中,du为电机电枢电压,单位V;di为电机电枢电流,单位A;n为电机转速,单位r/min;w为电机转速,单位rad/s;aR为电枢绕组内置,单位Ω;aL为电机电感,单位H;de为电枢反电动势,单位V;T为电机输出转矩,单位Nm;LT为电机转子等效负载转矩,单位N m⋅;d为电机转子阻尼系数;eC为电动势常数,单位N m/A⋅ ;mC为力矩常数,单位V min/r⋅ ;eqJ为电机转子等效惯量,单位2kg m⋅ 。根据螺旋传动原理,有
2.2 电机转子等效负载转矩的计算
根据干式DCT离合器的实际运动过程,分别计算离合器分离和接合过程中电机转子等效负载转矩。离合器分离时螺母受力如图 3,离合器接合时螺母受力如图4。
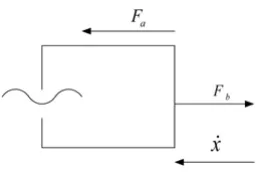
图3 离合器分离时螺母受力图
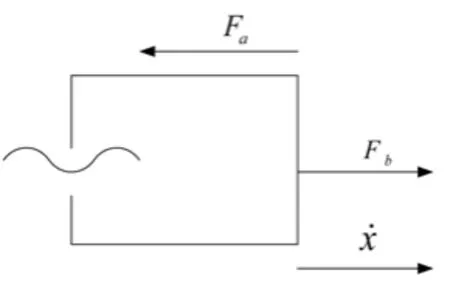
图4 离合器接合时螺母受力图
当电机的输出力矩作用在螺杆时,螺旋传动的效率为

其中,ϕ为螺杆当量摩擦角,单位弧度;α为螺杆螺纹升角,单位弧度。0.95~0.99是轴承效率,螺母上的轴向载荷与运动方向相反时取“+”号[4]。由此可得电机输入功率和等效负载转矩分别为:
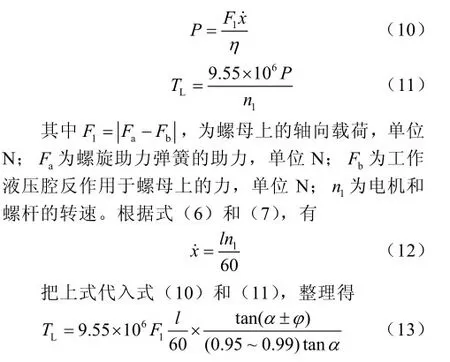
由于选用的螺旋传动具有自锁特性,即αϕ< ,所以当螺母上的轴向载荷与运动方向一致时,根据式(9),就会出现负效率。显然,负效率不能进一步用于计算电机的等效负载转矩。因此,本文根据机械原理教程[5]中对螺旋传动的受力分析,直接计算电机转子的等效负载转矩。根据图 3,当离合器分离时,若Fa≥Fb,即螺母上的轴向载荷与运动方向相同时

若Fa<Fb,即螺母上的轴向载荷与运动方向相反时:

其中,D为螺杆平均直径,单位m。
根据图4,离合器接合时,若Fa≥Fb时,即螺母上的轴向载荷与运动方向相反时,

若Fa<Fb,即螺母上的轴向载荷与运动方向相同时

2.3 分离力与螺旋弹簧助力的计算
分离力F与分离行程x的关系如图5所示。
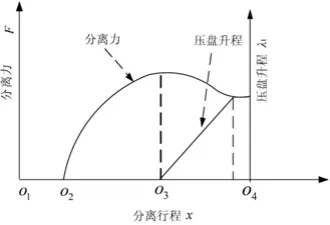
图5 分离力与分离行程x的关系
其中,o1o2为分离过程中,分离轴承消除空程阶段,对应于接合过程中,离合器完全接合后,分离轴承继续运动一段位移;o2o3为分离过程中,压盘压力降为0的阶段,对应于接合过程中,压盘压力大于 0的阶段;o3o4为分离过程中,压盘升程大于 0的阶段,对应于接合过程中,压盘升程减为 0的阶段。
分离过程中,在o2o3阶段,压盘压力逐渐减为0,但此时压盘升程为0,此时的分离行程主要是使分离指产生弹性变形;接合过程中,在o2o3阶段,压盘压力会逐渐增大,但此时压盘升程已减小为0,分离行程主要是使分离指恢复弹性变形。在离合器的起步和换挡过程中,该阶段控制(包括对目标分离行程的确定和对目标分离行程的跟踪控制)的好坏直接影响车辆的平顺性和舒适性。由于膜片弹簧碟簧部分的非线性和分离指的弹性变形,使得分离力与分离行程之间的关系很难找到。在关于膜片弹簧设计的教材[6],有著名的A-L公式,通过它可以计算得到在“假设分离指为刚性条件”下的分离力与分离行程的关系式。但由此得到的公式并不能用于自动离合器的控制。事实上,正是因为分离指弹性变形的存在,才可以通过控制该变形量,使得压盘压力可以缓慢变化,达到车辆平稳起步和换挡的目的。因此,本文通过实验,直接测量分离力与分离行程之间的关系式,并采用四阶多项式对其拟合,如图6所示。注意,图中已忽略分离过程标定曲线与接合过程标定曲线之间的差异,认为二者相等。
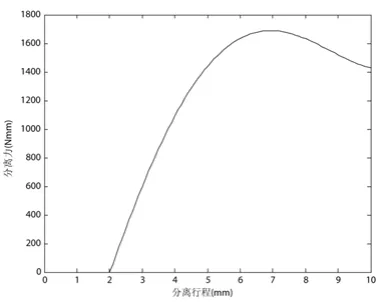
图6 分离力与分离行程

注意,这里的分离行程位移x已作统一处理,并不代表实际的分离轴承位移。另外,分离力F与工作液压腔反作用于螺母上的力的关系为

其中,pk为分离力与工作液压腔反作用于螺母上的力之间的比例系数。假设液体不可压缩,且液压管路没有沿程压力损失,则kp=Az/Ab,Az为工作液压腔在分离轴承处的作用面积,Ab为活塞头的面积。
螺旋助力弹簧的助力与分离行程x的关系

其中,Ks为螺旋弹簧弹性系数;z0为螺旋弹簧初始安装压缩量。离合器执行机构安装完成后,离合器处于完全接合状态,而且分离轴承还具有一定的空行程位移,此时的螺旋弹簧处于最大压紧状态,所以z0也是螺旋弹簧的最大压缩量。Z1为表示离合器彻底分离后,且压盘具有最大升程时螺旋弹簧剩余的压缩量。因此,在离合器工作过程中,螺旋弹簧始终处于压缩状态。
综上所述,可得离合器分离和接合过程中的等效负载转矩如图7和图8所示。
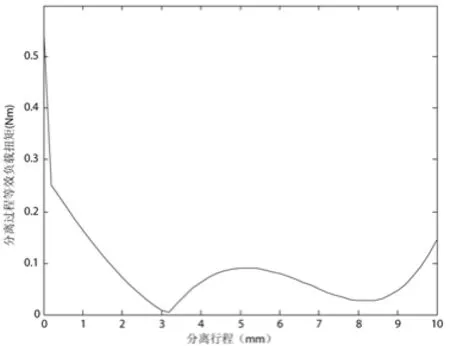
图7 分离过程等效负载转矩
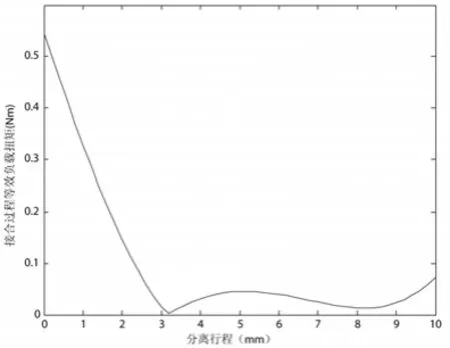
图8 接合过程等效负载转矩
3 滑模变结构伺服控制器设计
由上节的分析可知,离合器执行电机转子的负载特性呈现出强非线性。事实上,膜片弹簧还具有时变、时滞的特性。这给离合器执行机构的伺服控制带来挑战。
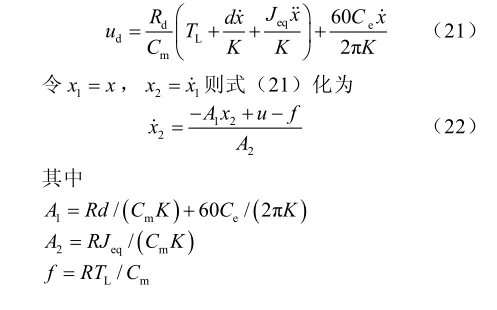
滑模变结构控制对系统参数和外在干扰的具有强鲁棒性,可以满足离合器执行机构伺服控制的要求。为简化滑模变结构控制器的设计,方便工程实现,可以降低控制器的阶次。考虑到直流电机电感很小,在设计控制器时,忽略直流电机电感,于是式(8)描述的直流电机模型可以简化为

4 仿真分析
根据前面建立的离合器执行机构模型和控制器,在Matlab/simulink进行离合器分离和接合过程的仿真。各种工况下接合过程仿真结果如图 9,分离过程仿真结果如图10。
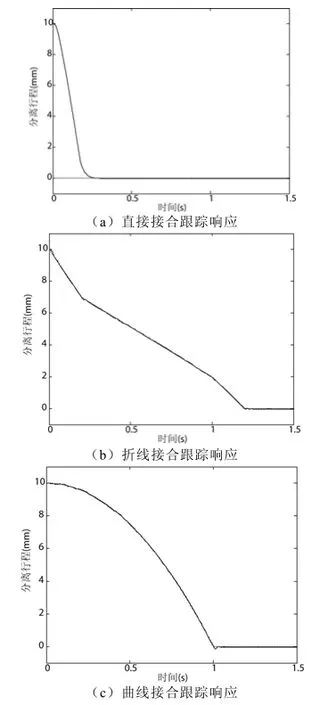
图9
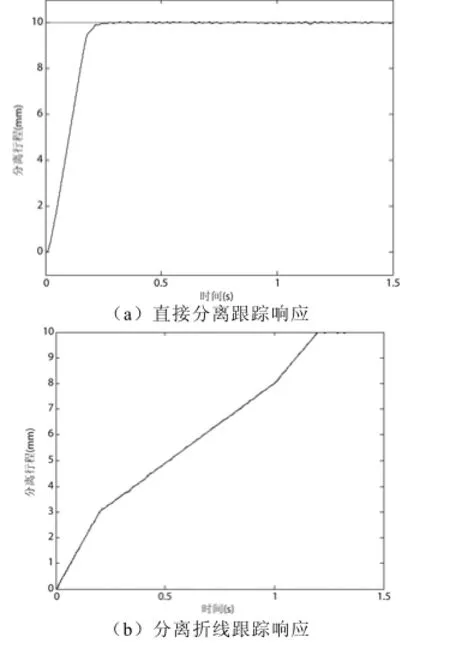
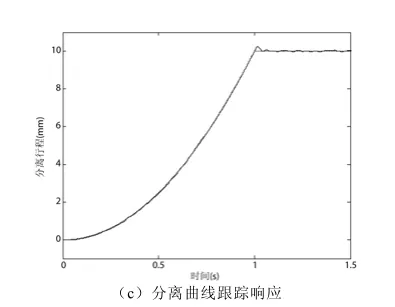
图10
图9,图10中的虚线为目标曲线,实线为实际的分离行程响应曲线。从图10,图 12可以看到,由于跟踪误差非常小,图9,图10中的虚线和实线几乎完全重合,且不同工况下的相对误差均小于3%。从图 9(a),图 10(a)可知直接分离或接合的响应时间在 0.25s左右,可以满足双离合器起步和换档过程中对离合器跟踪快速性的要求。
5 结论
建立了干式电动双离合器执行机构的动力学模型,考虑到执行机构的强非线性,主要是膜片弹簧的非线性和直流电机本身的非线性,设计了二阶近似变结构伺服控制器。仿真结果表明,该控制器跟踪精度高,能够满足DCT车辆对离合器执行机构高性能的要求。此外,该控制器的控制输入量只包含分离轴承位置传感器信号的一阶微分,具有很强的工程应用价值。
[1] 赵和平,刘奋,张建武.电机驱动的车辆离合器变结构控制[J].上海交通大学学报,2001(12):24-27.
[2] 赵永胜,张清云,任卫群等. 汽车AMT自动离合器的改进模糊滑模控制[J].汽车工程, 2006(8):750-754.
[3] 张德明,吴光强,模糊滑模变结构控制在 DCT电控离合器上的应用[J].汽车技术,2007(10):1-6.
[4] 蔡春源, 新编机械设计手册[M]. 沈阳:辽宁科学技术出版社,1993.
[5] 申永胜, 机械原理教程[M].北京:清华大学出版社,2005.
[6] 刘惟信.汽车设计[M].北京:清华大学出版社, 2001.
[7] 胡剑波,庄开宇.高级变结构控制理论及应用[M]. 西北工业大学出版社,2008.
[8] 刘金琨.滑模变结构控制 Matlab仿真[M].北京:清华大学出版社, 2005.
