基于单段初级PMLSM的矢量控制系统仿真
2011-04-25刘瑞英朱善俊
刘瑞英 朱善俊
(1.山西电力职业技术学院,太原 030021;2.太原供电分公司,太原 030001)
1 引言
永磁同步直线电动机在新型无绳提升系统中是核心部分,有永磁电机高效、节能的特点,也有控制方便、结构简单、低噪声、无污染等直线电机的优点。从目前情况看,在无绳提升系统中主要动力源采用永磁同步直线电动机作是最好的策略之一[1]。PMLSM垂直运输系统中的重要组成部分是控制系统,要深入研究整个垂直运输系统,还要考虑目前垂直运输系统存在的问题,因此在实际系统着手之前,先利用仿真软件对控制系统仿真是必要的。本文建立了单段初级PMLSM垂直运输系统的稳态模型,由仿真结果给实际系统在设计、调试等方面提供参考和借鉴;另外,利用计算机仿真在人力、物力和财力上花费少,因此采用仿真实验具有一定的经济价值,奠定了分段式PMLSM驱动的垂直运输系统在设计结构上的理论基础,推动了该结构在远距离、大推力场合中的工业应用。有效的PMLSM控制系统的仿真实验具有重要的意义。
2 PMLSM控制系统
2.1 PMLSM矢量控制原理
由电机统一理论得出的永磁同步电动机在直交轴坐标系下的定子磁链方程[2]

式中,dL、qL为直、交轴主电感;fψ为转子磁钢在定子上的耦合磁链。
定子电压方程

从(3)式可以看出,转子磁链和定子交轴电流分量基本上决定了永磁同步电机的电磁转矩。因为永磁同步电机的转子磁链恒定不变,所以永磁同步电机在基速以下恒转矩运行大都采用转子磁链定向方式来控制,即id=0的控制策略,则电压方程可以改为

则电磁转矩方程可改为

由此可知,当采用转子磁链定向控制永磁同步电动机时,永磁同步电动机转矩只与qi及fψ成正比,且两个量彼此独立,相互解耦。id=0只要很好地被控制,则dT只受qi控制。
直线电动机与旋转电机工作原理相似,因此永磁同步直线电动机也可采用转子磁链定向id=0的控制策略。
2.2 SVPWM调控技术[3]
SVPWM 调控技术是从电机的角度出发,在于如何使电机获得正弦磁通。电压空间矢量PWM以提供三相对称正弦电压的交流电机的理想磁通圆轨迹作为基准,用逆变器不同的开关模式所产生的实际磁通去逼近这个基准,逆变器的开关状态就由它们比较的结果决定,形成 PWM波形。图1为三相逆变器输出的电压矢量。

图1 三相逆变器输出的电压矢量
设定晶体管截止为0,导通为1,则功率晶体管的开关状态共有8个(000-111),相对应的有8个空间电压矢量,8个空间电压矢量中(111)和(000)为零矢量,每个空间电压矢量的幅值都是2VDC/3。空间矢量脉宽调制是用两个零矢量和 6个有效空间电压矢量的组合去等效Vref(旋转参考矢量),从而使电机磁通轨迹向圆形逼近。即在任意小的时间周期T内,使逆变器的输出和Uref(参考电压)的平均输出一样,如下式

式中,1T为空间矢量xU的作用时间;2T为空间矢量60xU±的作用时间。若T足够小,则式(6)可写成下式形式

从式(7)可看出,若T足够小,逆变器输出可以对Uref的变化实时跟踪。因为T1、T2的和可能小于T,所以在一个周期中剩余的时间要用零矢量来补充。式(7)就可写为式(8)的形式,即

式中,0T为111U或000U的作用时间。在此作用时间内,磁链矢量的末端静止,因而改变了磁链的旋转频率,实现了变频。
3 SVPWM调制的单段初级PMLSM矢量控制系统仿真模型的建立
为了验证控制方案,建立了SVPWM调制的位置、速度和电流闭环矢量控制系统仿真模型,进行了空载启动及负载突变的仿真。
在仿真中所采用的永磁同步直线电动机参数:动子质量M=5kg,极对数p=4,电枢电阻RS=1.9Ω,直轴电感Ld=2.7mH,交轴电感Lq=2.7mH,主磁链fψ=0.27Wb,极距τ=45mm,粘滞摩擦系数Bv=0Nm/s。速度和电流环都采用PI控制:速度环积分系数Ki=2,比例系数Kp=40;电流环比例系数Kp=9.8,积分系数Ki=2.6。
系统仿真模型如图2所示。
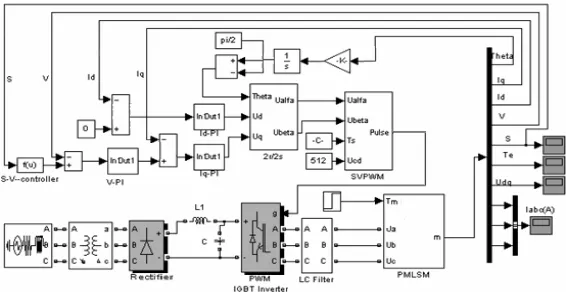
图2 位置、速度和电流三闭环PMLSM矢量控制系统
4 仿真结果及分析
设定动子最大有效行程s*=10τ,最大速度vmax=0.45m/s,空载起动0.4s时突加100N负载,0.9s时负载突减为50N。仿真波形如图3所示。
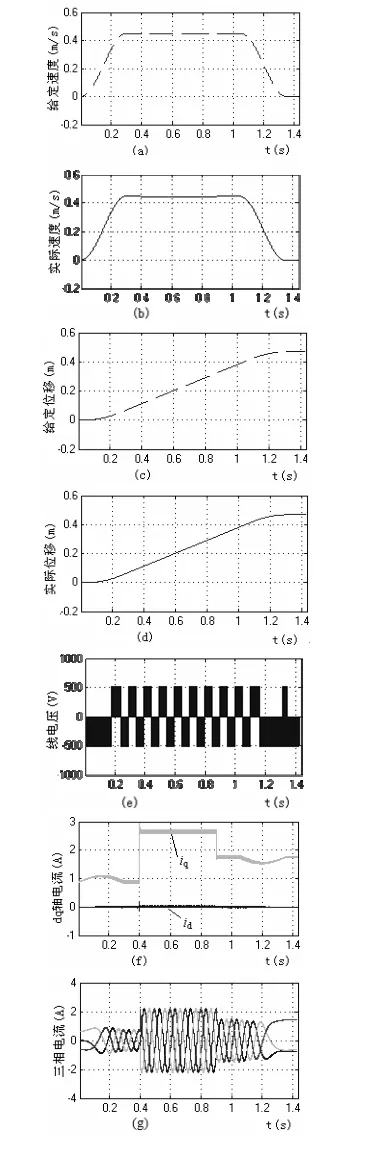
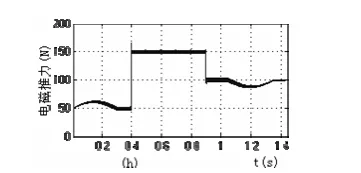
图3 给定vmax*=0.45m/s,空载起动,0.4s时加载100N,0.9s时突减为50N的波形
从仿真波形中可看出,在动子最大有效行程及运行速度给定后,位置控制器能够产生余弦型速度给定曲线,在整个行程的两端都要设定一段升降速的距离,距离编制的余弦速度给定曲线来给定升降速的速度。
从仿真结果中可看出,所设计的位置、速度和电流三闭环的矢量控制系统具有较好的跟随性、起动和制动性能,在负载突加和突减时具有较好的抗扰性能。从速度曲线上可看出,速度能够比较快的达到稳定,在SVPWM的控制策略下,电流仿真波形畸变较小。
5 结论
通过仿真实验结果可以得出,采用位置、速度和电流闭环矢量控制和SVPWM空间矢量脉宽调制的单段初级 PMLSM系统能够取得很好的控制效果,验证了所采取的控制策略的正确性。本文仿真结果为实现永磁同步直线电动机提升系统的控制提供理论依据,有非常重要的意义。
[1] 汪旭东,袁世鹰,焦留成.永磁直线同步电动机垂直运输系统的研究现状[J].微电机, 2000,33(5):35-38.
[2] 林春,邱建琪,何苗等.永磁同步直线电机驱动控制技术研究[J].中小型电机,2004, 31(6):41-44.
[3] 王建宽,崔巍,江建中.SVPWM 技术的理论分析及仿真[J].微特电机,2006(6):15-18.
