基于逆向工程的拖拉机造型CAD混合建模
2011-04-23徐立友杨超峰周志立赵剡水
徐立友,杨超峰,周志立,赵剡水,高 磊
(1.河南科技大学车辆与动力工程学院,河南洛阳471003;2.中国一拖集团有限公司,河南洛阳471003)
拖拉机造型设计是艺术设计与工程设计的结合,是整车产品开发的关键技术之一.与国外拖拉机产品相比,国产拖拉机造型存在外形简陋粗糙、总体与局部搭配不协调及设计效率低等缺点.因此,采用新技术进行拖拉机造型设计已成为迫切需要.正向设计是根据产品所要满足的功能与艺术效果,进行概念设计,依据设计思想勾勒特征线进行参数化CAD建模,具有根据产品特征进行修改变形方便、模型符合设计意图等优点,但同时存在设计精度低、修改量大等缺点.逆向设计具有依据测量数据为约束,建模精确的特点[1].现代的逆向设计主要以构造满足一定精度和光顺性要求的CAD模型进行仿制为目的,存在对产品的创新需求考虑不足、建模过程复杂、交互操作多等缺点[2].因此,将正向设计与逆向设计相结合,对产品进行混合建模是产品设计开发的趋势.一些研究人员提出了混合建模的相关理论并进行了相关产品的设计[3~5],谭昌柏等[6]利用混合建模理论进行了飞机造型的设计.但混合建模理论在拖拉机造型设计中的应用研究尚未见报道.本研究针对国产拖拉机造型呈现流线型,利用数学模型准确表达困难等特点,提出基于逆向工程的拖拉机造型CAD混合建模,利用正向设计思想,从测量的数据中提取可重新进行参数化设计的特征及设计意图,对T70轮式拖拉机轮罩进行混合建模.
1 油泥模型的建立
根据市场分析结果及用户的要求,利用三维软件勾勒如图1所示T70轮式拖拉机造型的效果图,作为制作油泥模型方案的参考.在实车上建立全尺寸(1∶1)的油泥模型.考虑到后期制造工艺性的要求,应对油泥模型进行特征分块.

图1 拖拉机造型效果图Fig.1 The effect drawing of tractor modelling
2 数据测量及预处理
2.1 数据测量
鉴于拖拉机造型油泥模型尺寸大、呈流线型、覆盖件表面大及特征点少且模糊等特点,采用光栅测量与摄影测量相结合的方法进行测量,选用德国Steinbichler Optotechnik公司的Comet 250可变焦数字测量系统作为测量设备,以德国Aicon 3D Systems GmbH公司开发的AICON 3D Studio作为摄影测量设备.
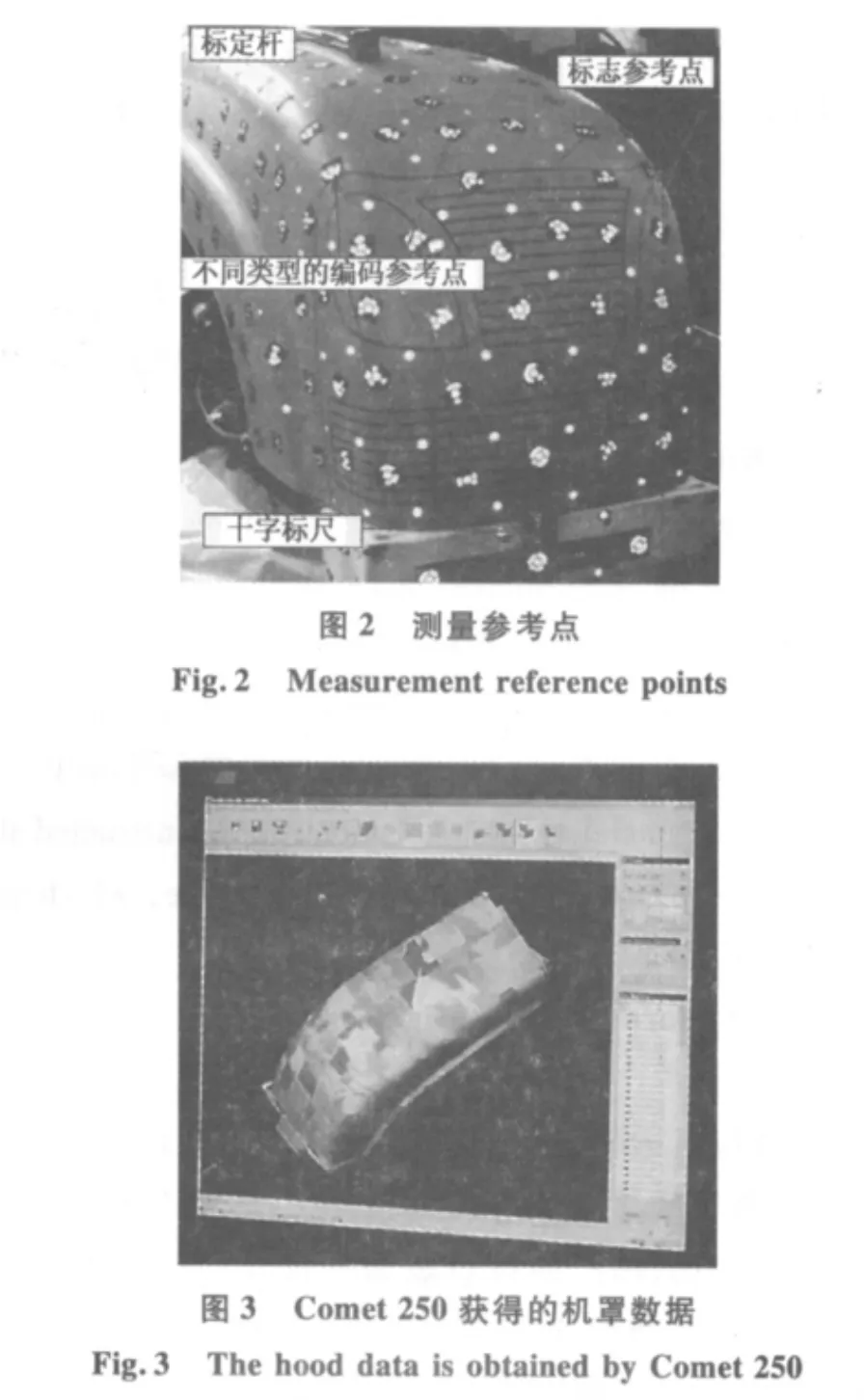
测量步骤:①对覆盖件的表面进行喷涂显影剂作预处理,形成漫反射,避免镜面高光对测量精度的影响.②均匀粘贴适当数量的标志参考点及编码参考点,放置十字标尺及标定杆,如图2所示.摄影测量系统利用有数字编号的编码参考点来识别其在图形中具体的编号代码、中心位置及数据中的特征等.光栅测量系统利用无数字编号的标志参考点识别其在图像数据中的中心位置及数据特征等.③采用Fine Pix数码相机在1 m左右距离,依次从不同角度(每次间隔约45°)及方位对覆盖件进行拍摄,得到机罩的标志参考点坐标,为光栅测量系统作辅助坐标定位,对每幅点云进行拼接定位及全局定位等.④把拍摄出的数字图像,导入AICON 3D Studio分析软件,得到表面参考点的三维空间坐标列表文件,导入光栅测量系统(Comet plus 5.0),作为光栅测量分片扫描结果拼接的基准.⑤利用Comet 250对数据进行基于特征的规划,包括识别轮廊线及棱线、确定曲面扫描路径和采用点及对特征的约束进行识别等.系统采用由中心标志点的投影栅格立体匹配方法对特征点进行识别、提取及匹配,一次测量应包含3个以上的的编码参考点,以利用数据的自动拼合[7,8].由 Comet 250 测量系统获得的机罩图片如图3所示,经过整体匹配、后处理及特征提取等操作,得到机罩的点云,共有222978个测量点.
2.2 数据预处理
受人、仪器及周围环境等不确定因素的影响,测量过程中存在测量误差、随机误差及数据的重复测量等.
数据的预处理是分析及提取特征点的基础,可降低点云数据的数量、修正测量误差及获取数据的微分几何信息等,同时可提高区域分块及特征参数提取等复杂算法的稳定性.数据处理的方法有噪声及异常点的过滤、数据的精简、数据的分割、数据的插补、特征的提取及三角网格化等.如图4所示,在CATIA的DSE模块中,设置公差球的半径为15 mm,经过滤后得点云的数目为9 495个,包围盒大小为725.988 mm ×1 380.943 mm ×993.243 mm.
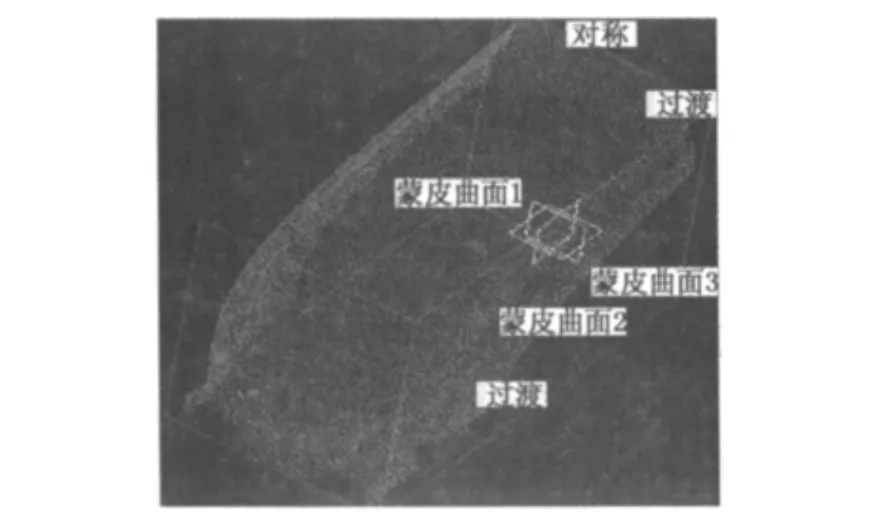
图4 点云的过滤与分析Fig.4 The filter and analysis of cloud points
3 建模方案的制定
逆向工程中产品的特征是由测量数据提取的且符合产品原始设计意图的工程元素[9,10].与拖拉机造型几何建模相关的形状几何特征可分为二维特征(直线、椭圆、自由曲线等)和三维特征(空间曲线、平面、过渡曲面、蒙皮曲面等).几何约束一般分为尺寸约束(几何尺寸)和拓扑约束(平行、对称、同心、距离、位置等).拖拉机造型的几何模型可作为一个总特征模型,模型由各子特征模型通过几何约束、集合运算(平移、扫掠、旋转、加、减等)及其它运算(对称、裁剪、过渡、求交等)等操作组合而成.设计时应先对覆盖件模型存在的特征进行标记,再对基于特征的约束进行分类提取,分析正向设计意图,制定建模方案,使设计步骤更加合理及规范.
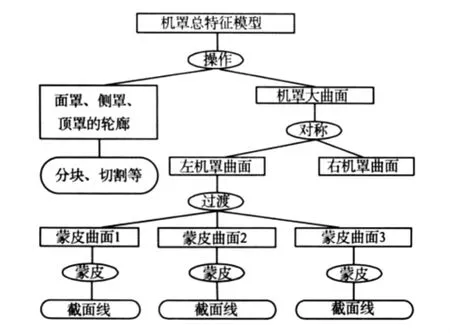
图5 建模方案的制定Fig.5 The formulation of solution
通过分析预处理后的机罩点云数据(图4所示),先对顶罩与面罩的大曲面进行重构.按照正向设计思想,通过提取特征线对机罩模型进行分割,建立顶罩、侧罩及面罩的灯窝、格栅轮廊边界.由于机罩具有对称结构的特征,先重建一半点云的模型,然后利用镜像获得另一半模型.半机罩模型由3块光顺的蒙皮曲面构成,具有变半径过渡曲面的特征.通过分析,依据图论中树的概念,制定如图5所示建模方案.
4 模型参数提取及分析
特征线及约束的提取是曲面特征划分的关键,遵循正向设计意图,依据几何特征及约束,重构机罩的特征参数化模型.
4.1 模型参数提取
拖拉机机罩主要由二次曲面、高次曲面及自由曲面组成,从数学表达上,一般方程f(x,y,z)=0可表示空间曲面,平面是曲面的简单例子,以法矢量可表示为

式中:n=[nx,ny,nz]T为平面的单位法矢,μ 为平面的三维表示方程,d为原点到平面的距离.
给定N个数据点,可表示平面的最小拟合准则为

式中:P=[nx,ny,nz,d]T为参数矢量,H 为一个对称正定矩阵.
通常二次方程以一个标准式表示,可对一般的二次曲面进行表示,包括球面、柱面、球面、抛物面、锥面和双曲面等.一般标准式是以矩阵形式表示,当系数行列式的判别式及系数的取值不同,方程式可表示不同的曲面[1,2].
自由曲面在重建时不考虑约束关系,一般先构成简单的子特征,再有子特征组成高层次的复合特征曲面,一般自由曲面造型方法包括拉伸、旋转、扫掠、融合、混合及放样曲面等.一般自由曲面的表示为Coons,Bezier及NURBS曲面等.
建模的关键在于特征的识别与提取.一般通过基于截面线对曲面的特征进行提取,通过曲线的类型来确定曲面的类型.也可根据估计的曲率值对曲面的特征进行提取,如平面上个点的2个主曲率值为0,在球面上为一常数,柱面一个为零,另一个相等.由于顶罩与面罩由自由曲面构成,可通过混合、融合等造型方法建立.侧罩由规则的二次曲面组成,可利用规则的造型方式去表示.侧罩与顶罩、侧罩与面罩、侧罩与侧罩的变半径过渡特征,可通过扫掠进行桥接操作.
在CATIA中,常利用 DSE模块中的 Curve From Scan命令,应用扫描线进行特征曲线提取,还可依据原始点云数据对原始特征曲面进行拟合,提取特征交线.截面曲线特征提取曲线是构造曲面的基础,蒙皮、拉伸、扫掠、旋转曲面的截面曲线多为二维的平面曲线.由于特征表达的曲面模型是按特征分块表达的,因此在截面曲线构造时必须识别直线、圆锥曲线、样条曲线等特征单元,并且分段重构这些特征,最后以NURBS形式整体表达.
因机罩是非平面的三维对称特征模型,在对对称特征的识别与检验后,建立对称基准面,删除左半边机罩的点云.按照分块点云曲率的变化,利用点云切片建立纵向及横向截面线,如图6所示.通过截面线的首末数据点,利用最小二乘法建立具有适当阶次的样条线,并进行平滑与光顺处理.最小二乘法的思想就是建立的曲线与曲面与N个点云拟合的距离在数学表达上最小.利用Curve From Scan命令,设置误差为0.1 mm,曲线上两分割点之间的最大段数为20,生成曲线的最大阶数为6,得到截面线.曲线的阶次在选择是应考虑光顺要求而不应选择过大.通过对分段轮廊曲线及边界曲线的单元参数进行提取,以及对截面曲线之间的几何约束关系进行识别,截面特征曲线一般由基本特征曲线元(直线、圆弧、样条线等)连接组成,如图7所示.利用 CATIA 中的 Planar Sections,Sweep,Split,Blend,Symmetry Definition 等命令,基于 CATIA中的特征模板数据库,对模型几何约束及特征元进行提取,并依据截面特征曲线重建曲面,实现拖拉机机罩CAD模型的重构.

图6 特征截面线的创建Fig.6 The creation of cross-section line
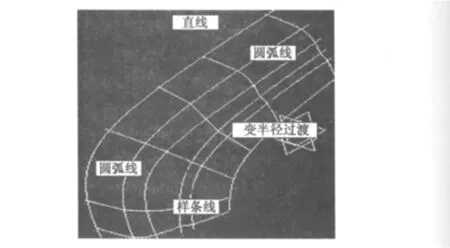
图7 模型参数的提取Fig.7 The extraction of moldel parameter
4.2 模型分析
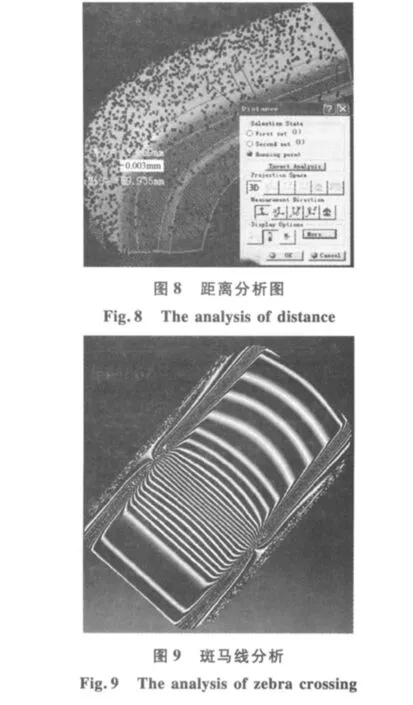
基于逆向的建模,其曲面的精度与光顺性对曲面的品质有重要影响,精度主要是对建立的曲面是否符合点云的约束进行分析,利用CATIA的Distance Analysis命令对重构的模型进行检测,如图8所示.多数蓝色表示的误差在 -0.1~0.1 mm,只有少数红色在设计误差外,符合设计要求.光顺性主要对曲面的曲率连续性、应能大小、是否存在奇点及多余拐点等进行分析,利用CATIA的Shape Analysis模块中的斑马线分析命令进行检测,如图9所示.满足曲率连续、应能小、不出现拐点等特性,表明曲面具有良好的光顺性.
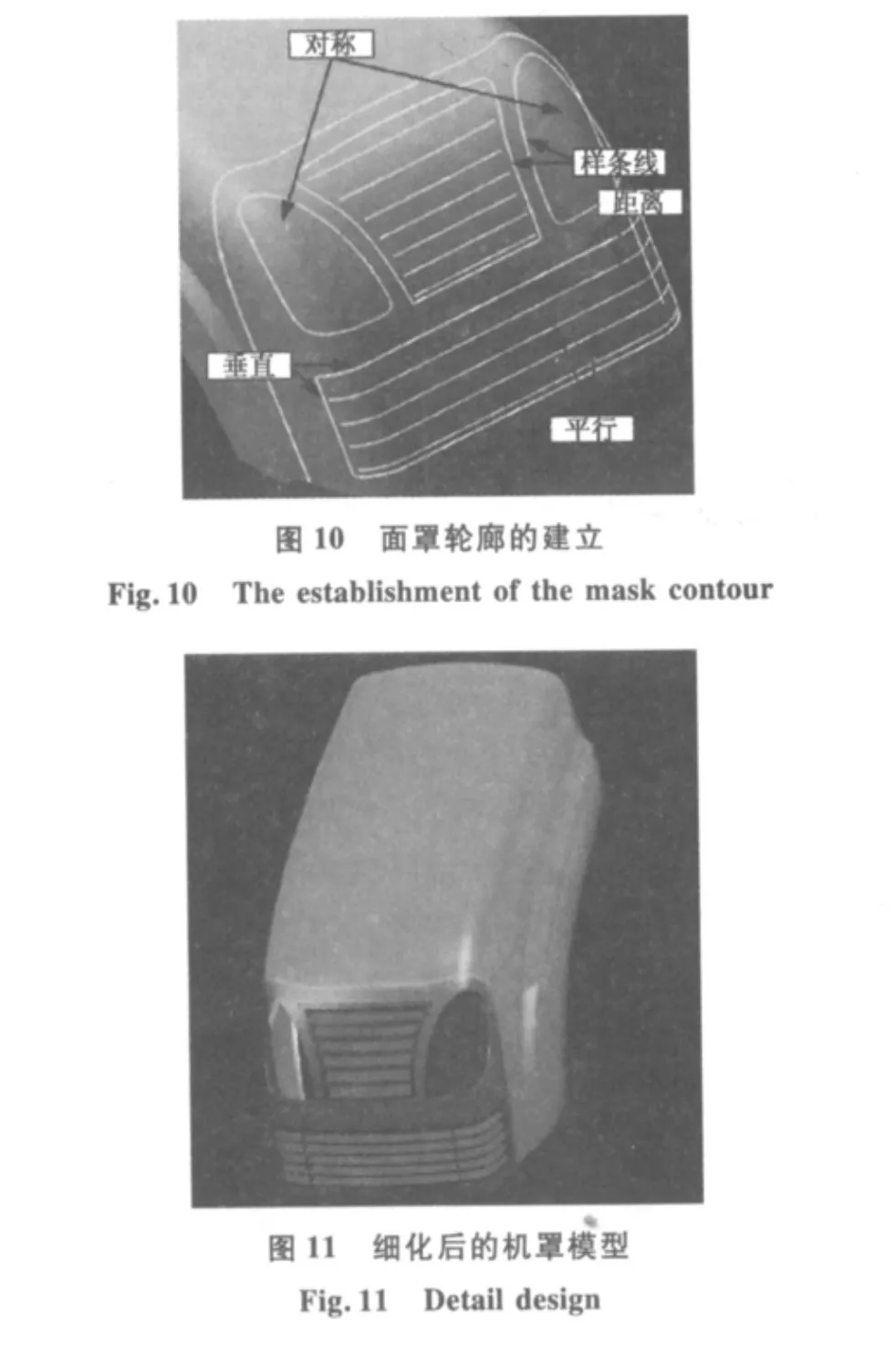
对重构的曲面模型,利用CATIA中的样条线工具,依据效果图及设计参数,按照正向设计意图,通过提取几何特征及约束,建立面罩、顶罩及侧罩的轮廊线,并对线的光顺性进行检测、分析及调整,以获得高质量的曲线,建立的面罩轮廊如图10所示.
利用CATIA的Sweep,Split等命令对机罩曲面进行细化及渲染,建立如图11所示机罩的模型.根据建立的数据模型,做到模具的一次性投入,已成功的在T70轮式拖拉机造型设计中得到运用.
5 结论
以T70轮式拖拉机机罩为例,通过对机罩曲面特征及截面特征的识别,提取出蕴涵在点云数据中的二次曲面、简单自由曲面、过渡曲面等特征,并基于提取的参数进行曲面重建.纯自由曲面区域可直接通过基于点云数据和边界曲线的约束进行重构,建立机罩模型.基于逆向的混合建模使孤立的曲面重建转化为从整体几何模型实现;可重建更为精确的CAD模型,减小误差;易于实现模型的再设计,提高设计效率;有利于后续CAE/CAPP/CAM过程的特征识别.但由于机罩曲面的约束主要表现为装配轮廊的一致性及光滑拼接,对如何建立基于约束的机罩数学模型进行参数的的提取还有待进一步研究.
[1] 金 涛,童水光,颜永年.逆向工程技术[M].北京:机械工业出版社,2003.
[2] 贾 明.反求工程CAD混合建模理论与方法研究[D].杭州:浙江大学,2003.
[3] THOMPSON W B,OWEN J C,JAMESH,et al.Feature recognition for reverse engineering of mechanical parts[J].IEEE Transactions on Robotics and Automation,1999,15(1):57-65.
[4] 刘云峰,柯映林,王秋成,等.基于特征的反求技术研究[J].计算机集成制造系统,2006,12(1):32-37.
[5] HUANG JB,MENQCH.Automatic data segmentation forgeo metric feature extraction from unorganized 3D coordinate points[J].IEEE Transactions on Robotics and Automation,2001,17(3):268-279.
[6] 谭昌柏,张丽艳,卫 炜,等.基于特征和约束的飞机反求建模[J].南京航空航天大学报,2009,41(5):581-587.
[7] 程军涛,段明德,刘 鑫,等.摩托车覆盖件的逆向设计[J].河南科技大学学报,2009,30(5):21-23.
[8] 张义力,吴家升,王军杰.结合COMET与AICON 3D Studio的数据获取方法在逆向工程中的应用研究[J].机械,2005,32(6):10-12.
[9] 齐从谦,陈亚洲,甘 屹,等.反求工程中复杂曲面数字化重构关键技术的研究[J].机械工程学报,2003,39(4):131-135.
[10]赵桂范,姜 薇.基于特征的车身组件曲面建模[J].机械设计与制造,2007,5(5):163-164.
