潜艇对空投鱼雷的防御模型研究
2011-04-23周雪松程健庆
周雪松,程健庆,苗 艳
(中国船舶重工集团公司江苏自动化研究所,江苏 连云港 222006)
反潜战中,鱼雷是水面舰艇或反潜直升机攻击潜艇最有效的武器。现代声自导鱼雷能利用声自导系统以32kn到50kn的速度追踪潜艇。空投鱼雷其入水点一般距潜艇较近,从入水到攻击上1km范围内的潜艇,仅需花费1-1.5min的时间[1]。潜艇单靠机动规避来摆脱空投鱼雷的来袭比较困难。
当前防御空投鱼雷的有效措施之一是使用噪声干扰器切断空投鱼雷与潜艇的接触,从而使鱼雷自导系统迷盲,这就为潜艇争取到规避鱼雷的时间[2]由于噪声干扰器只能对目标进行干扰、抑制,功能比较单一,一旦被鱼雷穿越,将很快失去作用,此时潜艇生存概率很低,大约为15%(系统反应时间30s)[3]。为增强对抗效果,通常将噪声干扰器与自航式声诱饵配合使用。本论文以潜艇生存概率最大为指标,在典型的对抗态势下,研究噪声干扰器和自航式声诱饵联合使用的方法。
1 空投鱼雷对潜艇的威胁
直升机发射空投鱼雷一般出现在潜艇的近旁,要求是将鱼雷投放到离潜艇1km左右的范围内,以有利于鱼雷声自导系统的搜索和跟踪。潜艇检测到鱼雷入水的瞬态信息并进行报警,给出鱼雷的来袭方位,指挥员据此制定对抗方案。空投鱼雷从空投入水的那一刻起,到鱼雷依靠自导方式在某一设定深度上发现目标转入跟踪的时刻,大约需要花费15-45s的时间[4]。
目前空投鱼雷的搜索多为环形机动搜索,潜艇只要走出鱼雷的搜索范围即可保证安全。以美国 MK46型空投轻型鱼雷为例,它是一种高速、深潜、主动或主被动声自导的反潜武器,其使命是搜索、探测、攻击和摧毁潜艇。MK46空投鱼雷入水后开始连续不断地以s/10◦向右转圈环形搜索潜艇,当接收到一个或更多的有效回波时,就开始进入捕获与攻击阶段,操纵鱼雷向目标方向航行[5]。MK46型鱼雷采用主动搜索方式,最大搜索半径约为m1370 (7.4链)。当潜艇在较远距离听到空投鱼雷的航行噪声或鱼雷主动声信号时,应立即转向,将鱼雷置于艇尾可听测舷角作远离鱼雷机动,争取不进入鱼雷环形搜索范围。但是,空投鱼雷其入水点一般距潜艇较近,潜艇单靠机动规避来摆脱鱼雷的跟踪比较困难。
潜艇在防御空投鱼雷的过程中,主要是要求保持隐蔽,争取先敌发现,利用变向、变速和变深灵活机动,并尽可能结合使用水声对抗器材实施防御。防御空投鱼雷对潜艇的威胁,最有效的方法就是联合使用噪声干扰器和自航式声诱饵。噪声干扰器的噪声同时对目标和鱼雷实施干扰,使鱼雷自导作用距离下降,潜艇利用其强噪声掩护脱离,潜艇在脱离过程中始终位于干扰器干扰扇面内,从而使鱼雷无法发现并跟踪潜艇。自航式声诱饵主要用于诱骗声自导鱼雷,阻止鱼雷继续向潜艇接近,使鱼雷尽可能远离潜艇[3]。
2 噪声干扰器干扰模型
噪声干扰器是潜艇上普遍装备的一种水声软对抗器材。当近距离发现鱼雷来袭时,潜艇可立即投放噪声干扰器,通过发射强功率宽带噪声,降低空投鱼雷的作用距离和探测、跟踪性能,中断其对目标的声接触,进而使其致盲、丢失目标[6]。
当主动声纳检测时,声纳方程为:SL−2TL+TS≥NL−DI+DT。当噪声干扰器工作后,干扰器所在的鱼雷或潜艇接收波束内的噪声干扰级自噪声项NL被干扰噪声项NL′和NLj代替:
当潜艇发射噪声干扰器后,即形成一个以鱼雷为顶点与干扰器连线为角平分线的扇面区的鱼雷听测盲区,潜艇走出这个盲区就有可能被鱼雷声纳发现。
图1 噪声干扰器干扰区域
潜艇发射干扰器后要将干扰器置于潜艇与对抗目标之间,利用干扰器所形成的干扰范围,通过潜艇正确的战术机动使对方声纳或鱼雷丢失目标。噪声干扰器通常为悬浮式,干扰器工作后即形成一个以散布点为中心的圆形压制干扰区域,干扰圆的方程为:,r为干扰圆的有效干扰半径。TE、TC为过鱼雷T点通过干扰圆的两条切线,∠CTE=2θ为干扰器对鱼雷声纳的有效干扰扇面,潜艇处在干扰器有效扇面内时,噪声干扰器对潜艇起到有效保护作用,即∠STD=α<θ。
3 自航式声诱饵发射扇面模型
由于潜艇对鱼雷报警距离有限,一旦发现来袭鱼雷,选择合适的自航式声诱饵发射方向是确定潜艇反鱼雷水声对抗方案的首要环节。在联合使用噪声干扰器和自航式声诱饵后,自航式声诱饵的发射方向显得更为重要,自航式声诱饵在此种情况下确定发射方向的原则是:声诱饵能尽早穿越噪声干扰器的干扰扇面,尽早被声自导鱼雷发现,诱骗鱼雷远离潜艇。自航式声诱饵发射扇面就是诱饵发射后,保证鱼雷先发现诱饵的可发射航向范围。
自航式声诱饵发射扇面如图2所示。图中鱼雷报警时,潜艇和鱼雷分别位于S和T点,首先在鱼雷报警方位线上截取SO作为鱼雷航速,那么以O点为圆心,以声诱饵航速大小为半径作一个圆,过S点做圆的两条切线,分别与圆相切于A与B两点,Q为潜艇报警舷角。保证自航式声诱饵发射出管后,先于潜艇被空投鱼雷搜索扇面捕捉到,自航式声诱饵相对于鱼雷的运动方向必须满足一定的条件,即诱饵发射方向扇面角满足:。由于空投鱼雷入水后向右偏转环形机动搜索潜艇,在模型中还应考虑鱼雷环形搜索偏离报警方位线的夹角α,如图3所示,诱饵发射方向扇面夹角为SAB′∠ 即
图2 鱼雷报警时声诱饵发射扇面

图3 鱼雷环搜时声诱饵发射扇面
4 仿真计算及结果分析
在仿真实验中选取典型的对抗态势进行计算:假定鱼雷报警时,潜艇的初始位置为坐标原点,以初速6kn匀速向正东方向航行,即航向90°。为利于鱼雷搜索,鱼雷初始航向朝向潜艇的初始位置。潜艇规避时首先向鱼雷来袭方位发射噪声干扰器并根据鱼雷报警信息计算诱饵发射方向,潜艇的规避机动,转向背对
4.1 对抗态势描述
着声诱饵发射方向并加速。
图4 潜艇—鱼雷对抗态势图
在鱼雷报警后,潜艇、自航式声诱饵和鱼雷的运动状态如图4所示。在图中显示了潜艇、自航式声诱饵和鱼雷的运动状态变量。
潜艇在报警时刻的位置为,(XS,YS),潜艇速度为
鱼雷入水位置为(XT,YT),鱼雷速度为

自航式声诱饵的发射位置为潜艇位置,速度为
潜艇—鱼雷的相对运动状态方程为
自航式声诱饵—鱼雷的相对运动状态方程为
在仿真实验中,鱼雷的检测门限可由声纳方程得到,SL−NL+DI−DT≥2TL−TS。方程右端为一固定值,可理解为鱼雷检测目标时的最大允许能量损失,将其作为模拟检测门限 PowMax。在仿真中,实时计算鱼雷到目标的距离 R和相对舷角Q,令PowAct= 2TL(R)−TS(Q)。当PowAct≤PowMax,则认为主动检测到目标,否则检测不到目标。
4.2 仿真计算条件
1)潜艇为常规动力潜艇,潜艇加速度为0.05m/s2,转弯半径为 1 20m,最大规避速度范围为10到20kn之间[7]。
2)鱼雷为轻型反潜鱼雷,鱼雷速度36~45kn之间的均匀分布,搜索扇面为沿中心线各45◦,自导作用距离为1500m[7]。
3)文中仿真计算取噪声干扰器频率 30kHZ,干扰器作用范围近似看作半径为r(m900~600)的球体;诱饵模拟的目标强度 26dB,诱饵航速 12kn;海况3级,水深400m;鱼雷、声诱饵和噪声干扰器工作可靠性均为100%。
4)鱼雷报警方位与本艇声纳参数有关,取方差为3◦正态分布;鱼雷落水位置距离潜艇D0=800~1200m,误差取方差为 0.1*D0正态分布;鱼雷落水位置位于潜艇右舷 30◦~120◦,间隔30◦,取方差为2◦正态分布。
5)在一定的水声环境条件下,采用蒙特卡洛法,对鱼雷攻击目标的典型态势进行计算,仿真计算次数500次。
4.3 仿真结果分析
潜艇使用噪声干扰器规避主动声自导鱼雷攻击时,强干扰噪声压低了鱼雷主动接收机的信噪比,从而大大缩减了其自导作用距离,为潜艇走出鱼雷搜索带争取了宝贵时间。鱼雷报警后,经过系统反应时间(30s)即向鱼雷来袭方向发射噪声干扰器。图5显示了在噪声干扰器与鱼雷不同距离下,噪声干扰器干扰噪声级对鱼雷主动自导作用距离的影响,当干扰噪声级小于120(dB)时,对鱼雷干扰作用是很小,但是随着噪声干扰器噪声级的增加,鱼雷自导作用距离明显下降;随着鱼雷与噪声干扰器之间距离的缩小,干扰器对鱼雷作用距离影响也越明显,为潜艇近距离摆脱鱼雷跟踪提供了机会。
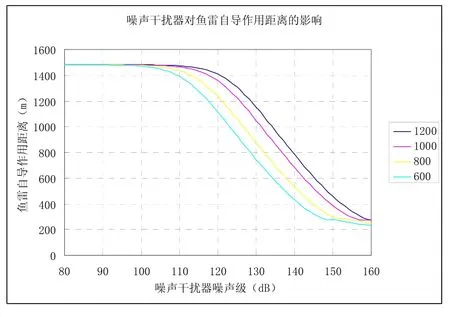
图5 噪声干扰器对鱼雷自导作用距离的影响
在计算声诱饵发射方向的仿真实验中,取噪声干扰器干扰噪声级为140dB,潜艇规避速度18kn进行计算。当鱼雷投放位置距离潜艇小于1000m时,潜艇的生存概率很低(接近于 0),这种情况下的数据不再作进一步的分析。
考虑鱼雷落水位置距离潜艇为1200m时进行计算,由图6可知:当鱼雷位于潜艇大、中舷角时,诱饵发射方向与鱼雷方位线的夹角为70°~100°为宜。当诱饵发射方向小于70◦时,是向鱼雷来袭方向发射诱饵,虽然能使诱饵最早驶出噪声干扰器干扰扇面尽快被鱼雷发现,但是诱骗时间太短,鱼雷在识别诱饵后能及时发现潜艇;当诱饵发射方向大于100◦时,是背离鱼雷来袭方向发射诱饵,诱饵需要花很长时间才能离开噪声干扰器的干扰扇面,鱼雷还未捕获诱饵时,就已经穿越噪声干扰器发现潜艇,达不到诱骗鱼雷的效果。当鱼雷位于潜艇小舷角时,潜艇生存概率最低,主要是此时鱼雷和潜艇处于迎击状态,潜艇规避时间较长。
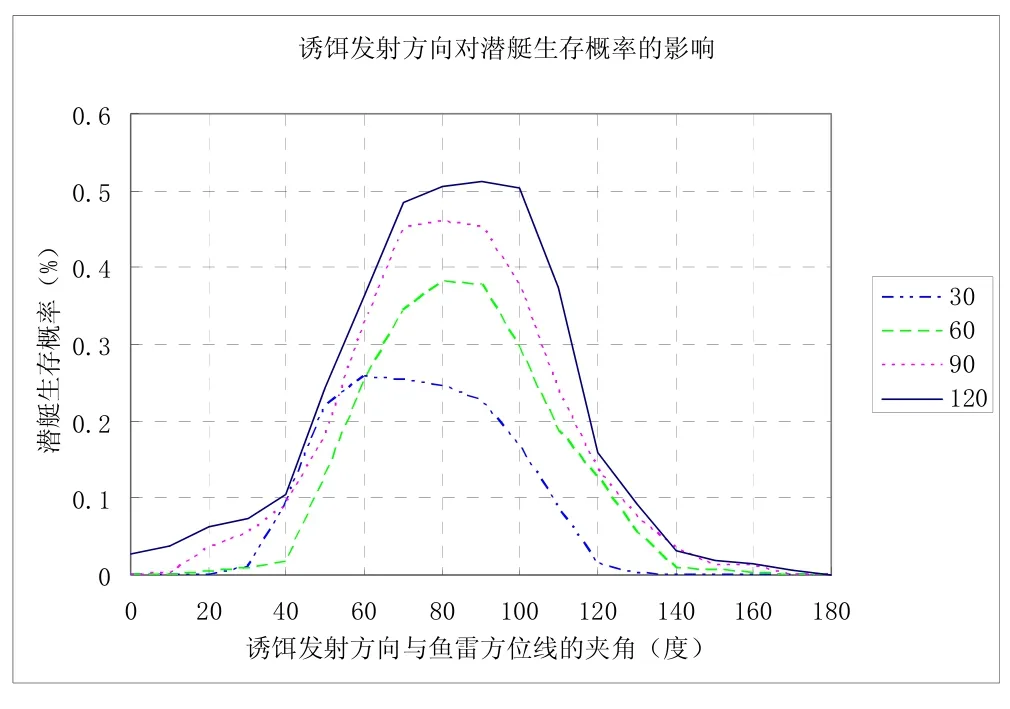
图6 自航式声诱饵发射方向对潜艇生存概率的影响
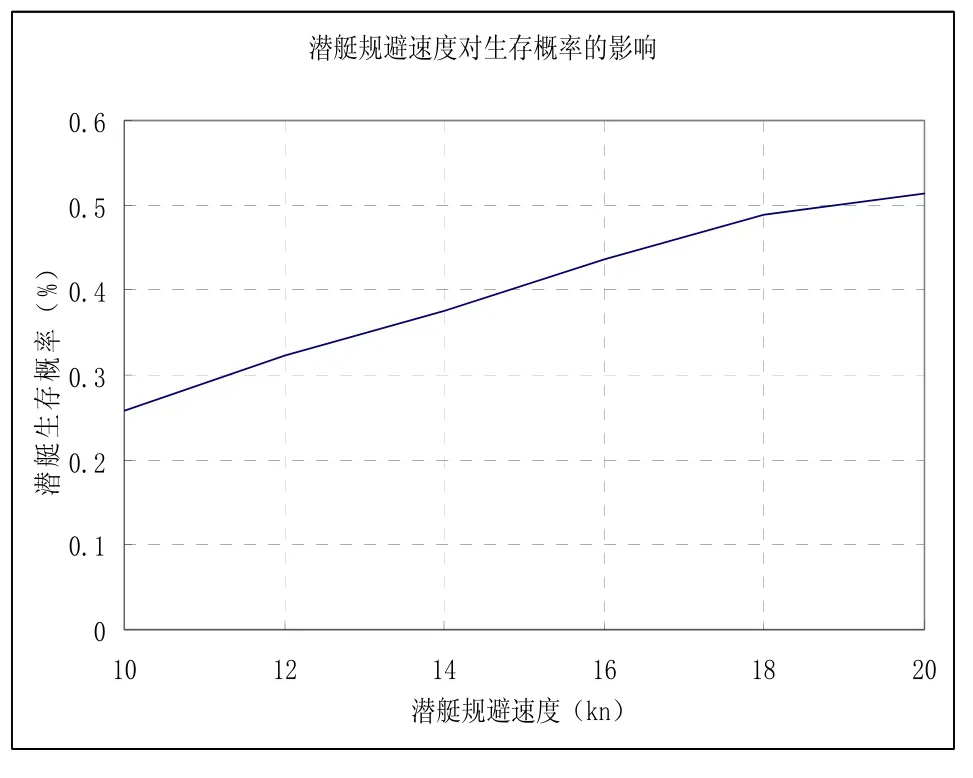
图7 潜艇规避速度对生存概率的影响
MK46型鱼雷通常采用主动搜索方式,潜艇在规避过程中通常采用最大速度。当鱼雷处于潜艇右舷120◦时,潜艇采用上述结论中诱饵最优发射方向(90◦)后,潜艇规避转向背对着声诱饵方向并加速。从图7可以得知:在联合使用噪声干扰器和自航式声诱饵后,随着潜艇规避速度的提高,对潜艇的生存概率有很大的改善。
鱼雷识别诱饵后,必然对潜艇进行再搜索,这将对潜艇造成极大的威胁。所以,潜艇在联合使用诱饵和干扰器后,在规避过程中应始终位于干扰器干扰扇面内,时刻监视鱼雷动向,并做好再次对抗的准备,利用各种有利的水文环境,使潜艇尽快驶离鱼雷搜索范围,提高潜艇规避成功的概率。
5 结束语
本文从噪声掩蔽条件下的主动声纳方程出发,仿真计算了噪声干扰器干扰噪声级对鱼雷主动自导作用距离的影响;采用模拟统计的方法仿真分析了潜艇在联合使用噪声干扰器和自航式声诱饵时,自航式声诱饵的发射方向和潜艇规避速度对潜艇生存概率的影响。仿真结果表明:潜艇联合使用噪声干扰器和自航式声诱饵比单纯使用噪声干扰器能有效提高潜艇生存概率。研究结果对潜艇防御空投鱼雷具有一定的参考价值。
由于空投鱼雷入水位置距离潜艇近,防御难度大,即使联合使用噪声干扰器和自航式声诱饵,潜艇生存概率仍然不是很高。为最大限度提高潜艇生存概率,潜艇应尽早发现敌反潜直升机的活动,采取有效的防御手段,使直升机难以稳定跟踪和攻击。
[1]刘平香,姚蓝.反鱼雷水声对抗技术的现状和发展[J].声学技术,2001,24(4):183-187.
[2]姚蓝,韩明连.潜艇对抗空投鱼雷系统技术研究[J].声学技术,2002,21(1):88-90.
[3]Ko-Hsin Liang,Kuei-Ming Wang.Using simulation and evolutionary algorithms to evaluate the design of mix strategies of decoy and jammers in anti-Torpedo tactics[C].Proceeding of the 2006 Winter Simulation Conference:1299-1306.
[4]李耀波,黄海明,陈炳锋.浅谈反鱼雷水声对抗技术[J].水雷战与舰船防护,2004,(4):33-37.
[5]阎福旺.水声对抗技术[M].北京:海洋出版社,2003.
[6]高学强,杨日杰,杨春英.噪声干扰器对抗鱼雷的作战效能建模与仿真[J].声学与电子工程,2009,3(95):11-13.
[7]Armo,K.R.2000.The relationship between a submarine’s maximum speed and its evasive capability[D].Master’s Thesis, Operations Research Department,Naval Postgraduate School,Monterey,CA.