基于贝叶斯网络的空中目标威胁估计方法
2011-04-23方立恭
朱 波,方立恭,金 钊
(海军大连舰艇学院,辽宁 大连 116018)
在防空作战中,对空中目标的威胁估计是影响作战指挥决策的关键因素。随着空中威胁形势日益严峻,单纯依靠指挥员的作战经验对空中目标的威胁程度进行判定已经难以适应信息化防空作战高强度、快节奏的要求,如何利用先进的数据融合技术辅助指挥员进行威胁估计,已经成为现代防空作战迫切需要解决的问题。从作战指挥决策的角度看,防空作战不仅是作战实体之间的对抗,更是认知领域的对抗,由于防空作战中空中目标的信息获取属于样本难得问题,因此对目标的威胁估计不仅要依据观测到的战场信息,还要融合防空作战中的历史数据和专家经验。此外,由于战场信息复杂多变,具有高度的不确定性、不完备性,因此威胁估计还要能对不确定信息进行推理。目前,常用的威胁估计方法有模糊数学[1]、神经网络[2]、专家系统[3]、黑板模型[4]、基于逻辑的模板匹配[5]、多属性决策[6]以及简单的影响因子加权方法等[7]。这些方法虽都有一定的针对性,但各自的缺点也很明显,因此本文采用贝叶斯网络(Bayesian networks,BN)建立空中目标威胁等级评估模型,该方法可以很好地解决威胁估计的关键问题,结合专家知识和基于不确定信息的推理,将其应用于威胁估计,将具备以下优势[8]:
• 贝叶斯网络使用图形化的模型对军事领域知识进行表达,同时通过具有语义性的推理逻辑对不确定性问题进行求解,符合人类的思维模式;
• 贝叶斯网络将领域知识和专家经验(先验信息)与战场观测到的事件(样本数据)有机结合起来,不仅避免了主观因素可能造成的偏见,而且削弱了样本数据带来的噪音问题;
• 贝叶斯网络实现了定性分析与定量分析的有机结合。它能够在战场数据不完备的情况下从战场事件推断目标的威胁等级,其基于概率模型和概率语言的推理方式保证了推理结果具有很高的可信性;
• 贝叶斯概率的特点使网络模型能够反映威胁估计的连续性和累积性这两个重要特征。这种时间一致性特征是基于规则和基于神经元网络等无记忆方法无法实现的。
从目前的应用情况看,将贝叶斯网络用于威胁估计的研究还处于起步阶段,其有限的成果大多集中于功能框架的构建,因此可操作性不强。本文从威胁估计的概念出发,以“防空作战事件”作为研究对象,从多个角度分析了空中目标威胁等级的影响因素,在此基础上,提出了一种可行的建模思路。
1 威胁估计的功能框架
威胁估计属于高层数据融合领域的研究,其概念和功能框架目前还没有权威的定义。国内外对威胁估计的研究很多,最著名的就是美国国防部实验室联合领导机构(Joint Directions of Laboratories, JDL)在其数据融合处理模型中的描述[9]:威胁估计是利用态势估计产生的多层视图定量地估计威胁的程度,它融合了态势估计的结果,是对战场态势进一步抽象的估计。可见,在实际的数据融合系统中对态势估计和威胁估计的划分并不是截然分开的。其中,态势估计是通过识别敌军的行为模式来推断敌军意图,并对临近时刻的态势变化给予预测,而威胁估计是根据态势估计所提供的信息,依据一定的知识和规则,指示出态势中的威胁及威胁大小的过程。
本文结合贝叶斯网络建立空中目标威胁估计的功能框架如图1所示。
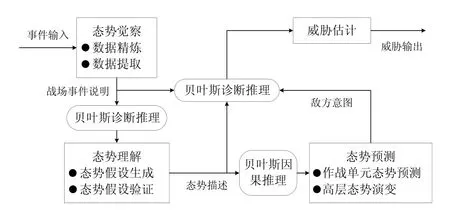
图1 基于贝叶斯网络的空中目标威胁估计功能框架
态势估计按照实现的功能不同,可分为态势觉察、态势理解和态势预测三级结构[10]。其输出分别是与目标威胁相关的战场事件、当前的态势描述和临近时刻的态势预测(敌方意图)。威胁估计将上述信息作为输入,通过贝叶斯网络推理得到最终的评估结果。
2 防空作战事件描述
2.1 防空作战事件的分类定义
在防空作战中,对目标的威胁估计是以战场事件作为输入的,为研究方便,本文根据不同的分类原则对这些事件进行了分类定义。
按照事件所处的层次进行划分,可将防空作战事件分为原子事件和复合事件。其中,可以被直接探测到的称之为原子事件,不能被直接探测的称之为复合事件,复合事件是由其它具有时间或因果关系的事件聚合而成的;按照事件表述的内容进行划分,可将防空作战事件分为态势事件和目标意图事件。其中态势事件又包含能力事件、状态改变事件、机动事件和关系事件。相关事件的定义如下:
• 能力事件描述的是我方和敌方在防空作战中有效歼灭敌人、保存自己的最大潜能。通常包含的要素有打击能力、生存能力、探测目标能力、机动能力和电子对抗能力。这些能力事件可以由相应的指标计算得到,例如目标的打击能力可以用目标的类型、携带武器的种类以及携弹量来表达,而生存能力可以由目标的雷达反射面积(RCS)来表示。需要说明的是,本文对“事件”的定义是广义的,这里将“目标具有某种能力”作为事件来处理。
• 状态改变事件反映的是实体状态瞬时的变化,如目标出现、消失、干扰源开(关)机、雷达开(关)机等,状态改变事件不受时间积累的影响,即与目标之前的状态无关。
• 机动事件反映的是实体属性在一定时间间隔内的变化量,如目标加(减)速、拐弯、爬高、俯冲等。以目标加(减)速事件为例,当目标速度在相邻探测时间间隔内的变化值超过规定的判别门限时,即判定事件发生。机动事件与时间相关,具有一定的连续性。
• 关系事件反映的是目标与我方实体之间的关系以及目标群的结构关系,前者主要针对敌我双方的位置关系,如“目标进入我防空武器射击区域”、“我方实体位于敌导弹发射角内”等;后者关注的是目标之间的战术协同关系,如“敌飞机有伴随式干扰”、“目标A与目标 B同群等”。关系事件较为抽象,需要一定的知识检测。
• 目标意图事件反映的是目标希望达到某种作战目的而采取的一系列作战行动计划。它包括目标可能采取的策略、针对的对象和临近时刻的行动,如“目标将使用导弹进行攻击”。目标意图事件不能被直接观测,它只能由其它事件推理得到。
2.2 事件关联
在进行防空作战目标威胁估计时,人们通常关心的并不是孤立的战场事件,而是反映目标威胁程度的复合威胁事件。事件关联的目的就是要利用事件之间的时间和因果关系,将低层次的事件聚合为高层次的复合威胁事件。从这个意义上说,基于贝叶斯网络的目标威胁估计就是在事件关联的基础上,从原子事件出发,逐层推理,最终得到代表目标威胁程度的复合事件的过程。
对于事件之间的关联,可以分别从关联关系、关联规则和关联强度三个方面进行表述。其中,关联关系和关联规则对应的是领域知识的定性描述,而关联强度则对应领域知识定量描述。本文采用贝叶斯网络对相互关联的战场事件进行建模,其本身就是一个知识获取的过程,在事件关联的表述上,贝叶斯网络分别利用有向弧和贝叶斯推理机制表达事件的关联关系和关联规则,而关联强度则用条件概率矩阵来描述。
3 空中目标威胁估计的贝叶斯网络模型
贝叶斯网络主要由两部分构成:一部分为有向无环图(Directed Acyclic Graph, DAG),通常称为贝叶斯网络结构,它由若干个节点和连接节点的有向弧组成,节点与知识领域的随机变量一一对应,有向弧表示变量间的因果关系,弧的指向代表因果影响的方向性(由父节点指向子节点);另一部分为反映变量之间关联性的局部概率分布,通常称为条件概率表(Conditional Probability Table,CPT),表中的概率值表示子节点与其父节点之间的关联强度或置信度[11]。图2显示的是一个简单而典型的贝叶斯网络模型。
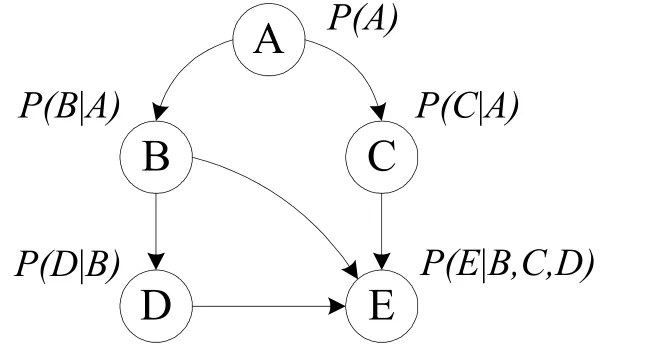
图2 Bayesian网示例
构建空中目标威胁估计的贝叶斯网络模型,需要经过以下三个步骤:
1)确定节点及节点状态 对于空中目标威胁估计来说,节点代表的就是防空作战中可能发生的事件。在现实中,事件的发生常常具有多种情况,相应地,网络中的节点也可以有多个状态,这些状态之间彼此独立,每个都代表了一种假设。举例来说,如果将“敌目标威胁等级”作为威胁估计的顶层事件,那么它对应的节点就可能包含“威胁等级高”、“威胁等级低”等多个状态。
2)确定节点关系 在确定了节点事件之后,接下来需要明确的是各个节点事件之间的因果关系,这些关系用有向弧表示。例如,当敌飞机意图对我进行投弹攻击(记为事件 X)时,通常会先进行俯冲(记为事件Y),基于这种影响关系,如果将前者作为“原因”,那后者就是“结果”,两者之间的关系可以用有向弧X→Y表示。
3)节点概率分配 概率分配包括两部分内容:对没有父节点的顶层事件指定先验概率;对有父节点的事件指定条件概率,如图2所示。节点概率通常是在网络初始化时由防空作战专家根据经验指定。
在利用贝叶斯网络进行问题求解时,那些值已确定的变量构成的集合称为证据D,需要求解的变量集合称为假设 X,基于贝叶斯网络的目标威胁估计就是求解给定证据(已发生的战场事件)的条件下假设变量(目标威胁等级)的后验概率P(X/D)。因篇幅所限,有关贝叶斯网络的推理机制可参考文献[11]。
4 应用示例
4.1 贝叶斯网络建模
想定敌飞机进攻我地面目标,其威胁程度包含“威胁等级高”和“威胁等级低”两个状态,与之相关联的事件分别是敌飞机隐身能力、机动方式、雷达工作状态、敌飞机与我方目标的位置关系以及敌飞机的作战意图。根据想定,可以建立图3所示的目标威胁估计贝叶斯网络模型。
为了体现复合事件和原子事件的层次关系,图 3中分别用了两种节点进行表示:复合事件用圆形节点表示,原子事件用矩形节点表示。
4.2 节点概率分配
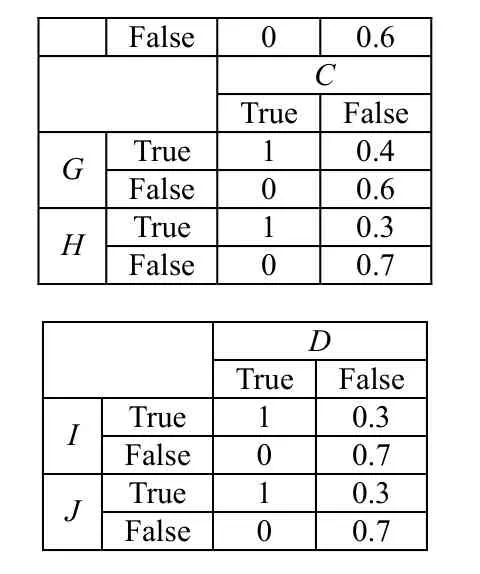
在进行节点概率分配时,除代表目标威胁等级的节点以外,其它事件节点可以只考虑两个离散状态,即真和假。本例假定敌目标“威胁等级高”与“威胁等级低”的概率均为0.5,其余节点的条件概率可按相同方法依次指定,分配结果见表1。

图3 目标威胁估计的贝叶斯网络模型
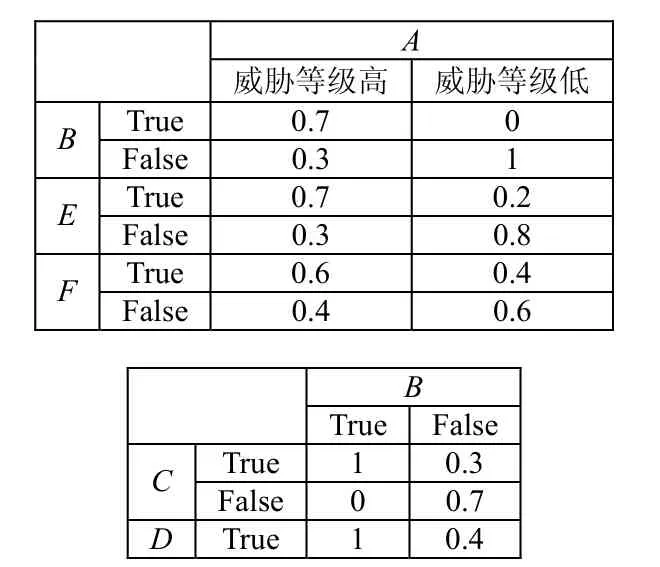
表1 目标意图识别的条件概率表
?
4.3 目标意图识别
假设在防空作战中,我传感器探测到以下事件:敌飞机加速、敌雷达开机、我方目标在敌雷达探测范围内、我方目标在敌导弹射程内。利用贝叶斯网络推理工具Bayesialab计算得到的敌目标威胁等级的后验概率如图4所示。结果表明,当检测到上述战场事件后,敌方目标“威胁等级高”的置信度变为81.61%,相比证据输入前明显增大了。

图4 仿真结果
5 结束语
作为一种推理模型,贝叶斯网络在知识表达和处理不确定性信息方面具有独到的优势,将其应用于威胁估计,可以大大提高防空作战指挥决策的自动化程度,进而提高科学决策的水平。本文对基于贝叶斯网络的空中目标威胁估计方法进行了初步探讨,其建模思路可在方法论层面为相关研究提供一定的借鉴。需要说明的是,文中威胁估计模型的建立需要依据防空作战的历史经验和军事专家的领域知识确定模型中的节点概率,但从目前的情况看,这项工作还缺乏统一的规范和标准,如何合理、可信地确定模型中的条件概率,依然是本方法的关键和瓶颈所在,而这也将是下一步工作需要研究和解决的问题。
[1]吴智辉,张多林.基于模糊理论的空袭目标威胁判断模型[J].火力与指挥控制,2005,30(4):92-94.
[2]邱浪波.一种应用神经网络技术的威胁估计算法[J].空军工程大学学报,2002 (12):25-28.
[3]Perron Gitton, Marie Claude.On a Generic Fusion Model in Situation Assessment Peocesses Dealing with Disparate Sources[C].Proceedings of the IEEE International Conference on Systems, 1998:11-14.
[4]涂嘉文,徐守时.基于知识的系统在多传感器数据融合中的应用[C].Hefei.Proceedings of 3th World Congress on Intelligence Control and Automation,2000:351-354.
[5]John Cantwell,John Schubert.Reliable Force Aggregation Using a Refined Evidence Specification from Dempster-Shafer Clustering[C].Proceedings of the Fourth Annual Conference on Information Fusion (FUSION 2001),2001(8):7-10.
[6]曲长文,何友.应用多属性决策的威胁估计方法[J].火力与指挥控制,1999,24(2):27-30.
[7]张由余,罗丽莉.多因子动态加权威胁估计方法[J].火力与指挥控制,1997(4):44-48.
[8]Adam X Miao, Greg L Zacharias, Shih-Ping Kao.A Computational Situation Assessment Model For Nuclear Power Plant Operations [J].IEEE Transactions on Systems, Man and Cybernetics, 1997, 27(6):728-742.
[9]Hall D L, Llinas J.An Introduction to Multisensor Data Fusion[C].Proceedings of IEEE,1997, 85(1):6-23.
[10]梁百川,梁小平.数据融合中的态势估计[J].舰船电子对抗,2003,26(1):12-15.
[11]肖秦琨,高嵩,高晓光.动态贝叶斯网络推理学习理论及应用[M].北京:国防工业出版社,2007.
