距离交会的误差估算及应用
2011-04-19李建豪
李建豪
(广东省化工地质勘查院,广东广州 510800)
距离交会的误差估算及应用
李建豪∗
(广东省化工地质勘查院,广东广州 510800)
本文运用几何方法分析距离交会测量点位误差的分布情况,将余弦定理与方差的定义相结合,推导出距离交会测量点位误差的估算公式。利用该公式分析在距离交会测量中,交会角对点位精度的影响以及在两种常见测距精度条件下所能达到的点位精度,并通过一个测量实例的观测数据进行验证。最后简要介绍了距离交会法在水平位移监测中的几点应用。
距离交会;误差估算;精度;水平位移监测
1 引 言
在工程测量中,经常使用距离后方交会的方法来测定未知点的坐标。如图1所示,在未知点P架设仪器,分别测定到两已知点A、B的水平距离a、b,根据A、B的x、y坐标和水平距离a、b计算出P点的x、y坐标。在精度要求比较高时,可能需要估算P点相对于A、B点的误差。直接根据P点x、y坐标计算公式进行误差估算,计算过程比较复杂,下面介绍一种简单的估算方法。

图1 距离交会法定点

图2 距离及点位误差
2 距离交会的误差估算
在作图上,距离交会可理解为分别以A、B为圆心,以a、b为半径画圆弧la、lb,(如图1所示),两弧的交点即待定点P,连AP和BP,夹角β为交会角。设水平距离a、b的测量误差分别为±δa、±δb,弧线la、lb会出现±δa、±δb的平移(实为同心圆弧,平行弧线),如图2所示。由于误差的微小性,可认为小弧段为小直线段,P点为图中大平行四边形的4个角点之一。由于圆弧与半径在切点处垂直,图2中另外两个标示夹角都等于交会角β;ka、kb边为:

P点的点位误差△P可根据余弦定理计算得:

代入式(1)化简可得:

由图2可知,当a和b误差的正负号相同时,应按式(3)计算,不同时,按式(2)计算。为方便计算,分别以△a、△b表示含正负号的误差,式(2)、式(3)可统一写成:

令f=1/sinβ,根据方差的定义
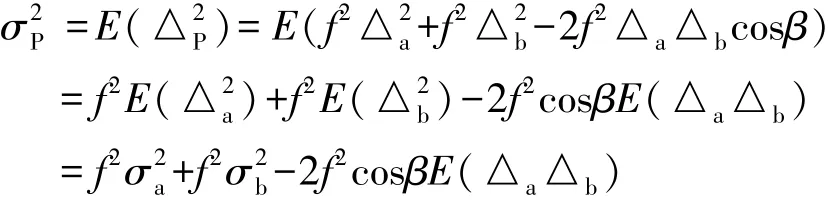
因为△a与△b相互独立,式中:


用中误差m代替标准差σ,并替换f,得:

通常,在观测人员、仪器设备和外界条件相同的情况下,水平距离a、b大致相等时,可认为a、b边的观测精度相同,即ma=mb,此时:

在已知a、b的中误差时,可根据式(5)或式(6)计算交会点的点位中误差;当交会角β=90°时,mP取得最小值,此时距离误差对P点的点位误差影响最小。
3 距离交会的测量精度
距离交会测量可用于水平位移监测。使用标称精度为±(2 mm+2 ppm×D)的仪器,水平距离300 m时,测距中误差为2.6 mm(不考虑垂直角误差对水平距离的影响);使用标称精度为±(1 mm+1 ppm×D)的仪器,水平距离300 m时,测距中误差为1.3 mm。表1列出了在上述两种条件下,按式(6)计算出的点位中误差mP(此处省略±号)。

按部分交会角计算的点位中误差 表1
从表1中的数据可以看出,随着交会角的减小,mP显著增大,在实际测量中,交会角宜在40°~140°之间。水平距离300 m以内,交会角在40°~140°之间时,标称精度为±(1 mm+1 ppm×D)的仪器,距离交会的点位中误差小于3 mm,可以满足《工程测量规范》(GB 50026-2007)二等变形监测的精度要求;标称精度为±(2 mm+2 ppm×D)的仪器,距离交会的点位中误差小于6 mm,可以满足三等变形监测的精度要求。
表2是某基坑水平位移监测中,1个基准点的10次检测数据。已知B1、B5点的平面坐标,在B6点架设全站仪,B1、B5采用强制归心装置安置棱镜,测定B6至B1、B6至B5的平距a、b,计算B6的X、Y坐标。水平距离使用Topcon GTS-721型全站仪及其配套棱镜单向施测两测回。仪器测距标称精度±(2 mm+2 ppm×D),10次测量平均间隔7天。

基准点B6的10次检测数据 表2
表2中中误差的计算过程:先计算10次观测数据的算术平均值,再由白塞尔公式计算子样中误差s;根据现行《工程测量规范》附录A中的方法,中误差(母体中误差估值):m=1.07×s。
经计算,水平距离a、b的中误差为±1.3 mm,再根据式(6)计算B6的点位中误差为±2.6 mm。这一实例表明,采用距离交会法测定点位,可以达到较高的观测精度,而且工作量较小。
4 距离交会在水平位移监测中的应用
在水平位移监测中,距离交会法可以用于检测基准点或工作基点、测定观测点坐标和设置临时测站。在测定观测点坐标时,也可以根据测区情况采用距离前方交会方式,在已知点上安置仪器,待测点架设棱镜。用于设置临时测站时,宜在地上设置固定的对中标志,每期观测都在该标志处对中整平仪器,用当次测定的坐标作为测站坐标,这样可以消除测站对中误差,还可保证每期测站的位置相同,观测图形相同。采用视准线观测时,可以使用两台测距精度相同的仪器,在测线的两端分别对相同的两个基准点进行距离后方交会观测,设置临时测站,两台仪器对向照准就形成实地的视准线,两个测站点的坐标确定一条相对于这两个基准点的直线,用于计算位移量。在场地周围空地狭窄、不便于设置稳定的校核基准点或工作基点的情况下可以考虑这种方法。
5 结 语
现在全站仪的测距精度一般都比较高,在短距离情况下,与角度或边角测量相比,使用距离交会法进行水平位移监测,方便快捷,容易实现较高的测量精度。
[1] 武汉测绘科技大学测量平差教研室编著.测量平差基础(第三版).北京:测绘出版社,1992
[2] GB 50026-2007.工程测量规范.
[3] 覃辉主编.土木工程测量.上海:同济大学出版社,2004
[4] 高井祥、张书毕、汪应宏、张绍良、张华海等.测量学.徐州:中国矿业大学出版社,1998
[5] 李青岳、陈永奇主编.工程测量学(修订版).北京:测绘出版社,1995
Estimate of the Error and Application of Linear Intersection
Li JianHao
(Guangdong Chemical Industry Geology Exploration Institute,Guangdong 510800,China)
This paper uses geometric method to analysis position error distribution of linear intersection point,which combines the cosine theorem and variance together to deduce the estimate formula of the position error.It analysis the impact of intersection angle position accuracy and the position accuracy that can be achieved under two common range accuracy conditions,and test and verify by a group of observational data.Finally,briefly introduce the linear intersection in horizontal displacement monitoring in a few applications.
linear intersection;estimate of the error;measurement accuracy;horizontal displacement monitoring
1672-8262(2010)03-119-03
P207
B
2010—10—17
李建豪(1976—),男,工程师,主要从事工程测量工作。
