船用比例电磁铁动态性能自动测试系统研究
2011-04-10王伟吉吴海锋赵进刚
王伟吉 吴海锋 赵进刚
1海军装备部舰船办公室,北京100071 2中国舰船研究设计中心,湖北 武汉430064
船用比例电磁铁动态性能自动测试系统研究
王伟吉1吴海锋2赵进刚1
1海军装备部舰船办公室,北京100071 2中国舰船研究设计中心,湖北 武汉430064
为了对船用比例电磁铁的改进研究提供试验数据支持,解决测试初始位置手动定位效率低且精度不高的问题,提高电磁铁动态性能测试的精度和效率,研究了一套自动测试系统。该系统采用高精度力传感器及电流传感器,通过可编程控制器(PLC)采集力传感器信号数据,闭环反馈控制步进电机,实现比例电磁铁的测试位置程控定位,消除手动初始定位不准对测试精度造成的影响。自动数据采集和动态性能曲线自动生成、计算、分析功能的实现提高了测试的效率。
船用比例电磁铁;阶跃响应;频率响应;PLC;PID
1 引言
比例电磁铁是一种将比例放大器的输出电流转变成输出力或位移的电气—机械执行器。船用比例电磁铁就是其中的一种,被广泛应用于船舶电液控统制系中,其动态响应性能和可靠性对船舶控制系统的安全性及生命力有着重大的影响[1]。因此,如何合理地设计其测试系统,解决以往测试初始位置手动定位效率低和精度不高的问题,提高测试的自动化程度及准确度,具有较好的工程实践意义。本文即依照相关的船用比例电磁铁测试标准,探讨其动态性能的有效测试方法[2]。
2 测试系统方案
根据“船用比例电磁铁”(CB3403-91)国家标准,船用比例电磁铁的动态性能测试项目有阶跃响应特性及频率响应特性,需要计算的性能参数有上升时间、幅频宽及相频宽等[3]。系统组成原理框图如图1所示。
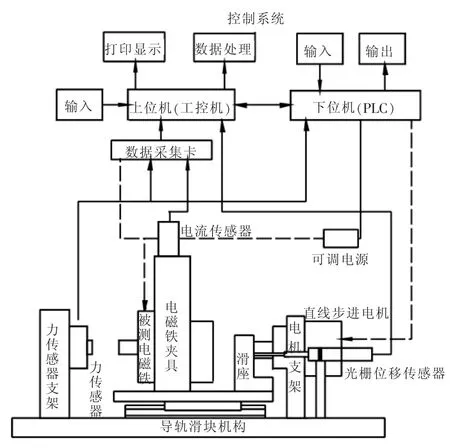
图1 系统方案原理图Fig.1 Diagram of system
被测船用比例电磁铁放大板的输入信号为0~7.5 V电压信号,行程2.5 mm。测控系统由上位机 (工控机)数据采集处理模块和下位机PLC自动控制模块组成。上位机数据采集处理模块通过数据采集卡高速采集高精度力传感器及电流传感器的测量值,并通过RS232串口与下位机PLC通信,向PLC发出控制指令及接受PLC的反馈指令信息[4-5]。然后由上位机测试软件对采集数据进行分析处理,绘制所需的相关性能曲线,计算出相应的性能指标[6]。下位机自动控制模块主要由PLC主模块、模拟量输入输出模块、电机控制脉冲发生模块、步进电机及其驱动器组成。PLC采集力传感器信号数据,闭环反馈控制步进电机,推动比例电磁铁在导轨滑块机构上运动,并最终将其定位于测试初始位置处[7]。
3 测试方法及实现
根据测试标准,动态性能测试开始前,须对电磁铁进行位置初始化,将其定位于电磁铁行程中位,以便较准确全面地反映其动态性能。
由于力型比例电磁铁失电状态下推杆处于最大伸出位移处,因此,调零只能在最大伸出位移处进行。为保证精确调零,采用加电调零方式。中位调零分为零位调零和中位行程行走两步,即首先将电磁铁推杆调整至零位 (推杆与力传感器刚接触的位置),步进电机再推动电磁铁行走一半的行程,最终将推杆定位行程中位。零位调零流程如图2所示。
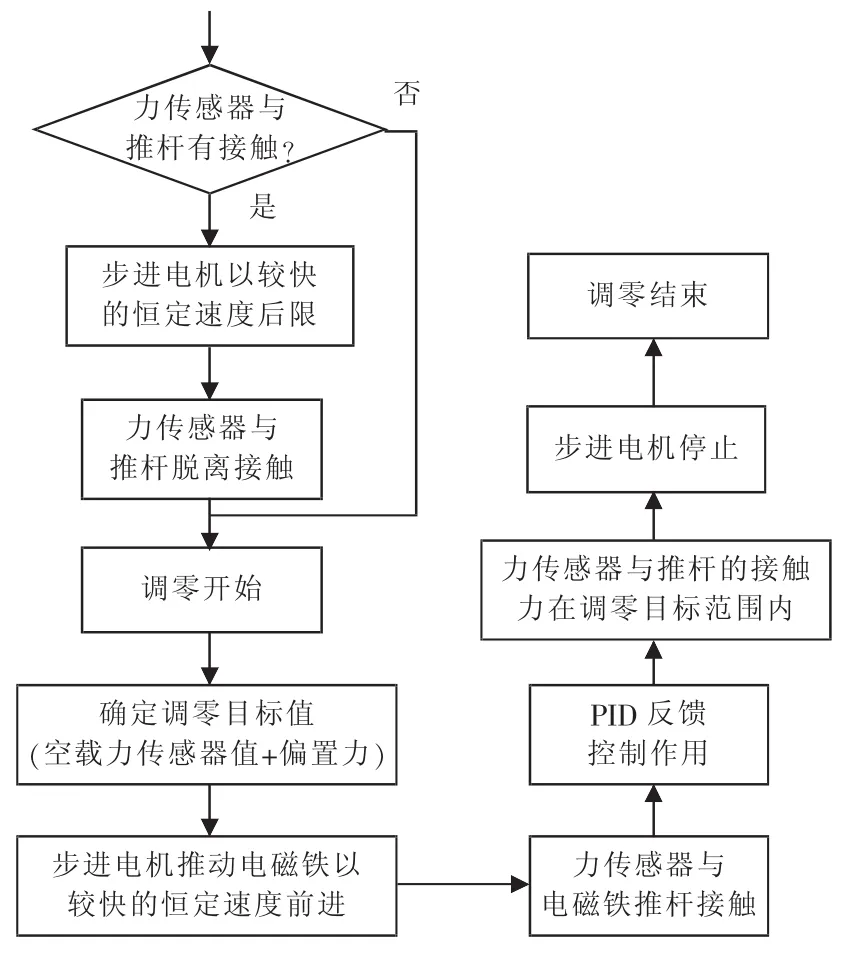
图2 比例电磁铁零位调零流程图Fig.2 Flow chart of zero position adjustment of proportional solenoid
调零开始时,上位机(工控机)通过RS232串口向下位机PLC发出测试调零命令,PLC调零定位程序开始运行。通信采用计算机链接专用协议,传输速率为9 600 b/s,半双工传输[8]。研华PCI-1712高精度数据采集卡输出比例电磁铁的模拟控制信号,PLC的模拟量输入模块FX2N-4AD采集力传感器的反馈数据 (0~5 V),PLC主模块中将反馈数据与给定目标值的偏差送到PID环节中,计算出当前控制步进电机所需的运行速度,最终将推杆定位于与力传感器刚接触的零位位置。通过设置适当的PID参数达到所要求的控制精度,测试中发现,P=2.5时定位效果较好。
零位调零时,由于被测船用比例电磁铁推杆在常态(不通电)下是处于最大伸出位置,由于现场干扰的波动,空载时力传感器的测量值经常处于波动状态。为保证调零精度不受干扰波动的影响,取调零目标值为调零开始时的力传感器数值加上一固定偏置值,此处取10 mV(即0.24 N)。由于比例电磁铁中位附近各位置都能较好地反映其动态特性,因而此初始偏置力不会对系统测试精度造成误差。
调零开始前,推杆与力传感器应脱离接触。PLC首先使电机以恒定速度前进,然后待推杆与力传感器接触时,反馈调零控制开始起作用。在调零过程中也可以中断调零,即令步进电机停止,上下位机的调零程序复位。
测试初始位置调整后,即可进行性能测试。为保证采集准确而真实的动态响应数据,采用研华PCI-1712高速模拟量输入采集方式,12位A/D转换器,总线主控DMA(master bus DMA)传输。采集时采样数据以半缓存单位向工控机传输,即采样缓存数据达到半满后即被传送至工控机[9]。

图3 比例电磁铁调零控制原理框图Fig.3 Diagram of zero position adjustment of proportional solenoid
阶跃响应特性测试:比例放大板的输入信号为0~7.5 V的阶跃信号,测试结果如图4所示。测得上升时间为0.025 6 s,瞬态响应速度较快。
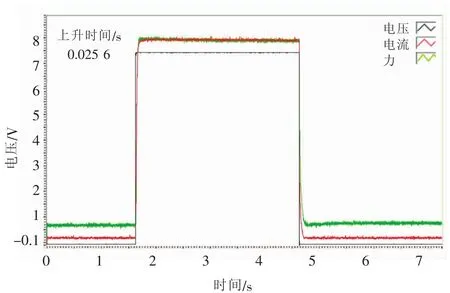
图4 阶跃响应特性曲线Fig.4 Step response characteristic
频率响应特性测试:比例放大板的输入为7.5V最大峰峰值,频率范围为1~21 Hz的正弦扫频信号,扫频频率间隔为1 Hz。测试结果见图5和图6。图5为放大板输入信号、电磁铁输入信号及输出力的时域图,图6为幅频特性和相频特性图[10]。
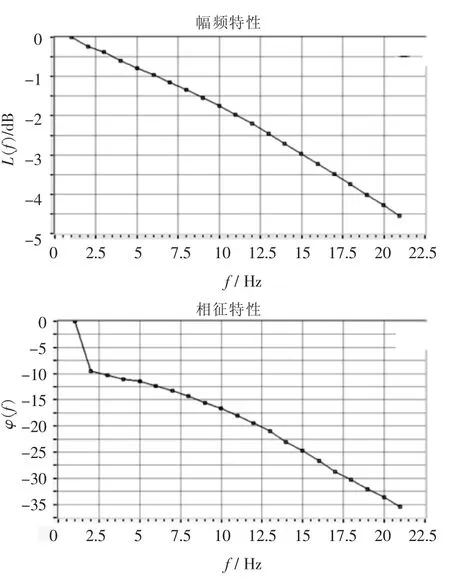
图5 频率响应特性曲线Fig.5 Frequency response characteristic

图6 频率响应特性时域曲线Fig.6 Time domain characteristic of frequency response
测试完成后,将测试结果创建报表并打印,同时也可以将测试数据保存,以便日后调用分析。
4 结语
本文采用计算机辅助测试技术(CAT)对船用比例电磁铁的动态特性进行测试,实现了比例电磁铁的测试位置程控定位,自动化程度高,测试效率高。测控系统采用上下位机模式,使用高速高精度工控机数据采集系统进行数据采集分析,自动绘制性能曲线并计算性能参数。由于初始定位误差不会对测试精度产生影响,因此,系统测试精度主要取决于数据采集分析系统的精度。
[1]吴根茂.新编实用电液比例技术[M].杭州:浙江大学出版社,2006.
[2]李勇,丁凡,李其朋,等.电磁铁力特性测试系统的研究[J].传感技术学报,2007,20(10):2353-2356.
[3]范文玲.电液伺服阀分布式测试系统研发[D].杭州:浙江大学硕士学位论文,2007.
[4]JIANG Y,LIU H Y,LUO Z,et al.Research on key problem of intelligent test system for solenoid valve[C]//Proceedings of the 2008 First International Conference on Intelligent Networks and Intelligent Systems(ICINIS'08). Wuhan,2008:39.
[5]SONG X L,ZHAO Y B,LIU C Y,et al.Solenoid valve switching characteristic test system design[C]//Proceeding of 2009 Ninth International Conference on Hybrid Intelligent Systems.Shenyang,2009:291.
[6]GUO B T,ZHANG J W,NIE X.Application of LabVIEW for hydraulic automatic test system [C]//Proceeding of 2009 International Conference on Industrial and Information Systems.Haikou,2009:36.
[7]王侃夫,梁森,王海群.基于FX-1PG定位模块的可编程逻辑控制器位置控制 [J].电机与控制应用,2006,33(6):45-47
[8]柳剑,陈於学,杨曙年.基于编程口的三菱PLC与PC机串行通信实现[J].自动化仪表,2010,31(11):31-33,37.
[9]王庆丰,范文玲.基于互相关原理的伺服阀频率特性测试系统研究 [J].中国机械工程,2008,19(13):1543-1546.
[10]袁宏杰,李传日,姚金勇.通用电液伺服阀自动测试系统研制[J].机床与液压,2009,37(1):105-106,87.
Computer Aided Test System for Dynamic Performance of Marine Proportional Solenoid
Wang Wei-ji1Wu Hai-feng2Zhao Jin-gang1
1 Ship Division,Naval Armament Department of PLAN,Beijing 100071,China 2 China Ship Development and Design Center,Wuhan 430064,China
In order to provide experimental data for improving the performance of marine proportional solenoid,and solve the problems of low efficiency and accuracy in locating initial test point by hand,then enhance the efficiency and accuracy of dynamic property test on solenoid,we designed a Computer Aided Test(CAT)system.The system consisted of high accurate force and current sensors,and used Programmable Logic Controller(PLC)to acquire data from force sensors,then controlled the step motor by the feedback signal.The system could automatically locate solenoid and test its dynamic performance,which eliminated the interferences by testers during locating the solenoid.And the functions of automate data acquisition,dynamic performance parameters calculation and plotting improve the test efficiency and precision.
marine proportional solenoid;step response;frequency response;PLC;PID
TP27,U665.1
:A
:1673-3185(2011)04-96-03
2010-10-13
王伟吉(1967-),男,硕士,高级工程师。研究方向:船舶动力装置。
吴海锋(1986-),男,硕士,助理工程师。研究方向:船舶动力系统。E-mail:wuhaif@163.com
10.3969/j.issn.1673-3185.2011.04.021