耙吸挖泥船DP/DT控制算法研究
2011-04-03尹志华俞孟蕻袁伟
尹志华 俞孟 蕻袁伟
(江苏科技大学电子信息学院 镇江 212003)
耙吸挖泥船DP/DT控制算法研究
尹志华 俞孟 蕻袁伟
(江苏科技大学电子信息学院 镇江 212003)
动力定位/动态跟踪;耙吸挖泥船;模糊PID
以耙吸挖泥船为应用背景,介绍了动力定位/动态跟踪的发展和现状,设计出基于模糊的PID控制算法来实现位置保持和按预定航迹疏浚。根据工程经验制定了符合耙吸挖泥船应用的模糊规则,同时通过Matlab及Simulink对其进行仿真。实验结果表明,该控制算法在环境力的影响下,DP/DT效果良好,满足工程实际需要。
0 引言
随着计算机、传感器及推进技术的飞速发展,耙吸挖泥船的疏浚作业向自动化方向发展,动力定位/动态跟踪(DP/DT)作为一种高新技术在应用中越来越受到人们的重视。耙吸挖泥船的DP/DT是指不借助于锚泊系统的作用,而利用自身装备的各类传感器测出其运动状态及风浪流等环境力,通过计算机复杂的实时计算来控制耙吸挖泥船的艏艉侧推,主推及舵产生适当的推力和转矩,以抵消环境力对挖泥船的影响,使挖泥船尽可能保持在设定的船位和艏向或按预定航迹进行疏浚施工[1]。DP/DT具有不受水深限制,可实现精确机动等优点,应用在耙吸挖泥船上可加快疏浚速度,提高疏浚效率和精度,提升疏浚的档次,取得良好的疏浚效益。
控制算法是DP/DT系统研究的核心。动力定位控制技术目前基本上已发展到了第三代,第一、二、三代动力定位产品集中反映了经典控制理论、现代控制理论及智能控制理论在船舶DP/DT控制中的应用。在国内,动力定位尚处于发展初期,在疏浚业领域尚属空白,特别在大型耙吸挖泥船方面,技术和市场还完全被国外的IHC和Kongsberg所垄断。
国内的动力定位设备完全依赖进口,这制约着未来我国船舶业的发展。作为一门高新技术,在疏浚业市场繁华的今天,动力定位拥有广阔的发展前景和市场潜力。
1 基于模糊的PID控制算法
耙吸挖泥船的疏浚是一个复杂的过程,在疏浚作业时,除了受到本身推进器的推力,还受到风力、波浪、海流、喷头后座力及耙管作用力等作用力的综合影响,产生纵荡、横荡、升沉、纵摇、横摇与艏摇6个自由度的运动。一般只考虑艏摇、横荡、纵荡三个方向。在实际的工程化应用中,很难建立起耙吸挖泥船精确的数学模型。为了适应工程化应用的需要,本文选用基于模糊的PID作为挖泥船DP/DT的控制算法。
模糊PID控制器是将模糊控制和PID控制相结合的技术,它依赖于被控系统的物理特性,将人工实践经验用模糊语言的形式加以总结和描述。运用模糊数学的基础理论和方法,把规则的条件,操作用模糊集表示,并把这些模糊控制规则以及有关信息作为知识存在计算机的知识库中,然后计算机根据控制系统的实际响应情况,运用模糊推理,实现对PID参数的最佳调整。它既有模糊控制适应性强、灵活的优点,又有PID控制器精度高的特点[2]。

图1 耙吸挖泥船DP/DT系统的结构框图
耙吸挖泥船DP/DT系统的结构框图见图1。DP/DT控制系统包含三条前馈反馈回路,每条回路包含一个形式上相似的模糊PID控制方程[3]。由于疏浚时船速一般低于4 kn,因此不考虑挖泥船在艏摇、横荡、纵荡三个方向的耦合。在DP/DT控制算法中,模糊PID控制器分别以三个方向的偏差e及偏差变化率△e作为输入。疏浚时,挖泥船的测量系统不断地检测e和△e,在一个时钟周期内完成对传感器的数据采集与挖泥船运动状态的估算,并发出相应的力和转矩指令FX,FY,MZ。算法的核心是通过总结工程技术人员的实际操作经验,建立合适的模糊控制表来对PID中的参数进行在线修正,以满足不同e和△e对控制参数的不同需求,使挖泥船具有良好的动态与静态性能[2]。
在疏浚过程中,风、浪、流是影响耙吸挖泥船运动姿态的环境因素。风作为挖泥船的主要干扰因素,它的速度和方向可以由风传感器测得。为了快速抵消风力的干扰,在DP/DT控制器设计时,采用前馈控制对风进行主动补偿,使风的变化在挖泥船未移动时就对风产生反力补偿,从而减小风力的影响。这样设计可以显著改善系统的性能,有助于DP/DT控制精度的提高[3]。海流由于速度难以测量,需通过kalman滤波器进行预估,作为干扰处理。
波浪分为一级和二级波浪,其中一级波浪表现为高频运动,可以通过kalman滤波器加以滤除;二级波浪表现为二阶的波浪漂流力,它会使挖泥船缓慢飘离原来的位置,在控制算法中对其进行反馈控制,从而达到定点或跟踪控制[4]。在DP艏喷过程中,由于喷头对纵荡方向产生的后座力很大,因此要对它进行补偿;在DT低速疏浚时,两条耙吸管对耙吸挖泥船自身也会产生很大的作用力,在控制器设计时也要进行耙管力的补偿。
1.1 偏差的计算及区域划定
DP/DT系统通过有关测量系统获得挖泥船的精确位置和艏向信息[5],使挖泥船定位在设定点或者按照预定航迹进行低速疏浚作业。
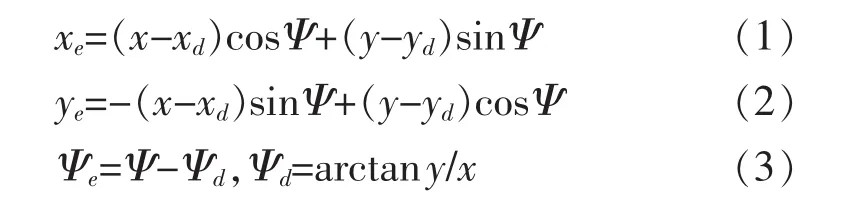
式中:x、y、Ψ为经过滤波后所得到的以大地为参考系的位置艏向信息;xd、yd、Ψd为以大地为参考系的DP/DT参考位置及艏向参数;xe、ye、Ψe为以挖泥船为参考系,在三个方向上位置和艏向偏差[6]。
现根据经过kalman滤波器滤波后得到的挖泥船实际位置与设定位置/预定航迹参考点之间的偏差,以参考点为中心,把周围的区域分为绿色、黄色、红色和物理四个区域。其中绿色区域表示挖泥船在此区域中可实现精确定位的DP/DT,效果明显;黄色区域表示警告,表示此时挖泥船已超出绿色区域,DP/DT精度有所下降;红色区域表示禁止的区域,此时DP/DT效果很差,需要尽快使挖泥船向黄色区域靠近;物理区域表示此时已不适合DP/DT的区域,示意图见图2。

图2 偏差区域图
1.2 系统的输入输出变量
DP/DT系统控制器的输入量是参考位置的船位和艏向(xd,yd,Ψd)信息。现以纵荡为例(横荡,艏向相似),选取挖泥船纵荡方向的位置偏差xe及其偏差变化率xce作为模糊控制器的输入量,PID参数的修正量ΔkP,ΔkI,ΔkD作为输出量。控制器各变量的语言值分负大、负中、负小、零、正小、正中、正大七档,隶属函数均为三角函数。挖泥船纵荡的语言变量、基本论域、模糊子集、模糊论域、量化因子见表1。

表1
1.3 模糊PID的控制规则
结合耙吸挖泥船运动的特点,根据工程操作人员的经验得到如下模糊控制规则:
(1)当偏差在红色区域时,选择较大的KP,较小的KD,同时使KI=0,从而使挖泥船快速地向设定点靠近;
(2)当偏差在黄色区域时,选择较小的KP,适当的KD和KI,使挖泥船向绿色区域靠近;
(3)当偏差在绿色区域时,通过选择较大的KP和KI,以便系统有较好的稳态性能,实现DP/DT的精确控制,同时当偏差的变化率较小时,选择大些的KP;偏差的变化率较小时,选择小些的KD。
模糊规则表见表2。

表2 模糊规则表
1.4 增量式PID控制算法
耙吸挖泥船DP/DT控制器的PID部分,选取增量式PID控制器,因为其相比于传统的PID控制算法有以下优点:前者提供给推力器的增量△uk,只需要保持现在以前3个时刻的偏差值;控制算法不需做累加,计算误差和计算精度问题对控制量的计算影响较小。由于增量式算法与原始值无关,易于实现手动到自动的无冲击切换[7]。
设第k-1及k时刻的控制量:

(5)-(4)后得到控制增量:

三个方向所需控制力及转矩:

FEX为DP/DT时滤波器估算的纵荡补偿力。
2 模糊PID的Simulink仿真
本文以某大型耙吸挖泥船为仿真对象,在Matlab中,利用fuzzy工具箱对其进行DP/DT系统控制算法的Simulink仿真(见图3,图4)。模拟海况1∶5 kn风速,135°风向角;1.5 m/s海流速度,0°流向角;1.0 m有义波高;海况2∶10 kn风速,135°风向角;3m/s海流流速,0°流向角;2.0m有义波高。
在不同海况条件下,挖泥船在纵荡,横荡,艏摇三个方向分别用常规PID控制和模糊PID控制的单位阶跃响应曲线图见图5~图10。对比分析可知,在相同海况条件下,基于模糊的PID控制较于常规PID控制有更好的控制效果,动态响应更快、调节时间更短,且具有较强的适应性,在纵向、横向和艏向控制方面具有一定的相似性。当海况条件变成海况2时,相比于海况1,响应曲线的超调变大、动态响应时间变长,但很快也趋于稳定。从中可以看出该控制算法具有一定的抗干扰能力,可以满足工程应用的实际需要。
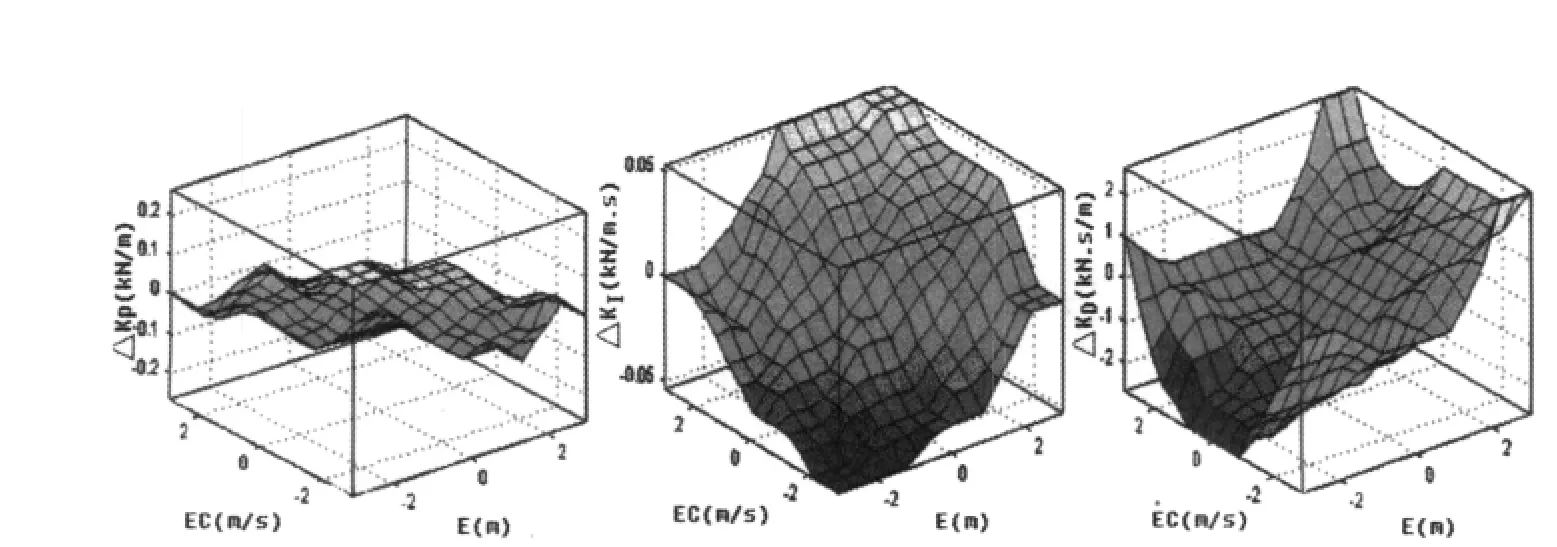
图3 模糊模块中的Δk PΔk IΔk D三维图

图4 Simulink下的模糊PID框图
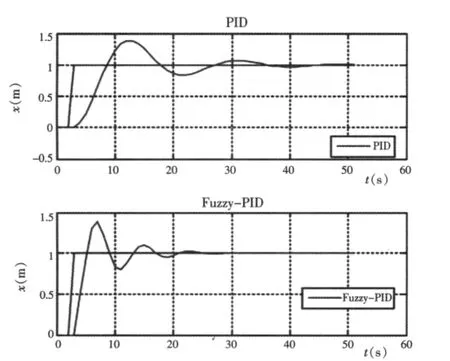
图5 海况1下纵荡的阶跃响应曲线

图6 海况2下纵荡的阶跃响应曲线

图7 海况1下橫荡的阶跃响应曲线

图8 海况2下橫荡的阶跃响应曲线

图9 海况1下船艏向的阶跃响应曲线
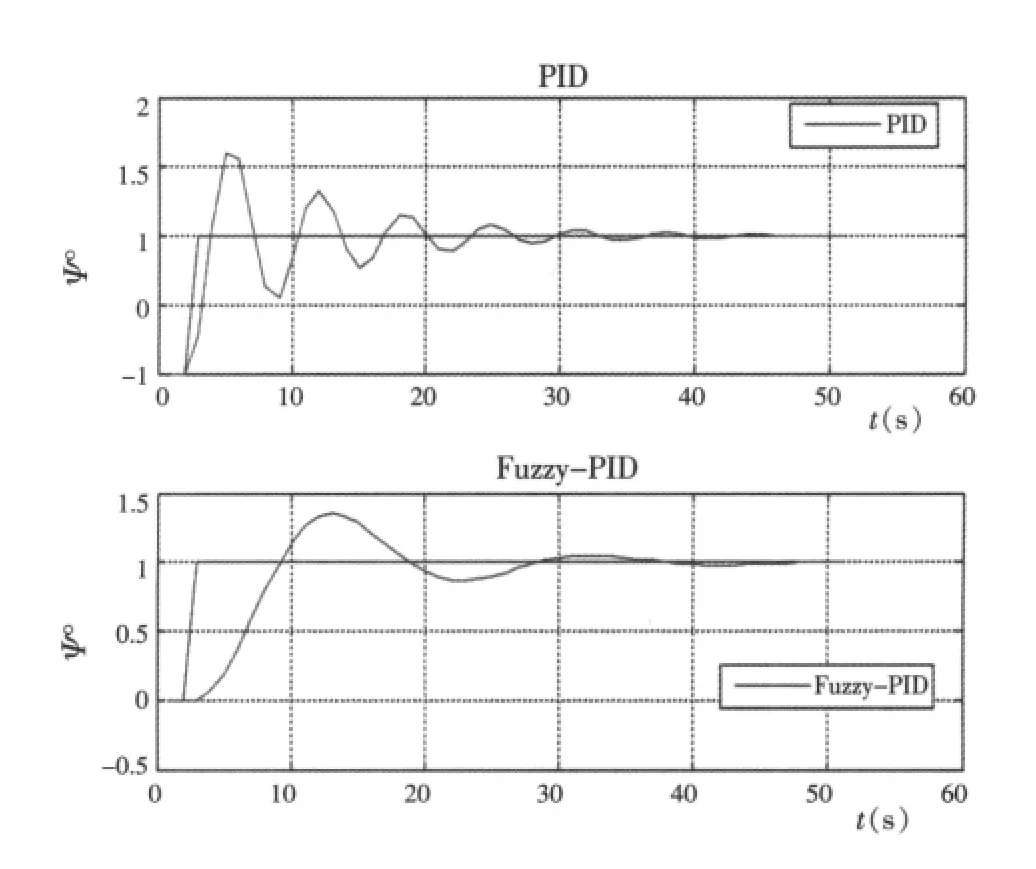
图10 海况2下船艏向的阶跃响应曲线
3 结语
DP/DT控制算法部分采用了基于模糊的PID控制算法,充分利用了模糊控制和PID控制的优点,通过工程经验制定了符合耙吸挖泥船应用的模糊规则,取得了预定的定位效果。DP/DT技术是现代船舶行业的一种高附加值的高新技术,随着计算机技术、传感器及推进技术的飞速发展,必将在未来的船舶制造中得到更多的应用和发展。
[1]何崇德.“大洋一号”船的动力定位系统[J].船舶工程,2004,26(2):24~27.
[2]窦振中.模糊逻辑控制技术及其应用[M].北京:北京航空航天大学出版社.1995:149~152.
[3]Max J.Morgan.Dynamic Positioning of Offshore Vessels[Z].Marine Division Honeywell Inc.1978.
[4]李文魁,陈永冰,田蔚风,蒋志营.现代船舶动力定位系统设计[J].船海工程,2007,36(5):77~79.
[5]IHC SYSTEMS.动态定位和动态跟踪系统操作手册[Z].2002:99.
[6]Katsyro Kijima,Yoshitaka Furukawa.On a dynamic positioning system for off shore platform[J].OMAE1997-VolumeI-A,Offshore Technology ASME 1997:112.
[7]谢剑英,贾青.微型计算机控制技术(第3版)[M].北京:国防工业出版社.2006:136~137.
DP/DT control algorithm for Trailing Suction Hopper Dredger
Yin Zhi-hua Yu Meng-hong Yuan Wei
Dynamic Positioning and Dynamic Tracking;Trailing Suction Hopper Dredger;fuzzy-PID
With the description of Dynamic Positioning and Dynamic Tracking(DP/DT)System for a Trailing Suction Hopper Dredger,the positioning and tracking under predefined circumstances is enhanced by fuzzy PID control algorithm.Based on the engineering experience,the rules of fuzzy-PID for Trailing Suction Hopper Dredger is customized and simulated by Matlab and Simu link.The tests show that the newly developed control algorithm substantially provides efficient DP/DT control performance even in severe environmental conditions and satisfies the practical requirements.
U675.9
A
1001-9855(2011)02-0049-05
2010-09-01
[项目性质]江苏省科技厅高技术研究项目(编号:BG2007031)。
尹志华(1986-),男,汉族,硕士研究生,主要从事船舶控制研究工作。
