地铁盾构控制测量方法探讨
2011-03-28庞红军卫建东黄威然
庞红军,卫建东,黄威然
(1.中铁隧道股份有限公司,郑州 450003;2.解放军信息工程大学测绘学院,郑州 450052; 3.广州地铁设计研究院,广州 510010)
0 引言
近10年来国内有20余个城市先后进行地铁建设,地铁区间隧道多采用盾构法施工。盾构法施工测量贯通精度要求很高,规范要求横向误差限差100 mm,纵向误差限差50 mm,洞门钢环最大允许盾构机贯通偏差160 mm(洞门钢环直径6 600 mm,盾构刀盘6 280 mm)。随着地铁在中心城区的逐步完善,越来越多的郊区延长线开工建设,就可能使盾构区间很长,很多条地铁线同时在一个车站交汇,使地铁车站形式变得复杂多样,车站深度的加深又使联系测量难度增加,由于工期要求,会采用一个端头井或始发井进行盾构始发,这就加大了贯通难度。因此,采用传统的地铁盾构控制测量方法很难满足新形式下地铁发展的需要,需要采取一些新方法或综合方法来适应今后长盾构隧道区间、车站复杂多样的地铁发展模式。盾构施工控制的研究很多:吕国岭等[1]对目前国内各种盾构测量的方法做了研究;聂爱梅[2]更多地从设计的角度对地铁控制测量检测技术方法做了论述;邹勇[3]对传统的地铁长隧道控制测量方法做了讨论;肖书安[4]主要对国外隧道工程施工测量技术的现状和发展做了阐述;丁桦[5]介绍了武水高速公路隧道的控制测量方法;王科锋[6]对长大隧道洞内控制测量方法进行了叙述。但是对目前的地铁盾构控制测量方法尤其是对今后发展的长盾构隧道间区、车站复杂多样的盾构施工控制测量方法还没有系统的、有创新的探讨。本文结合各种施工现场从采用强制对中观测墩、主副导线点、基线控制、整体平差、全自动陀螺经纬仪等方面对盾构区间控制网的布设应用提出了独特的见解,基本上能够满足今后地铁盾构施工的发展需要。
1 区间控制测量
1.1 2测站通视
在平行于2车站左右线区间地面建造物上,布设区间控制网,如图1所示。A和B2测站通视,如2测站点在建造物上,则采用强制对中观测墩,可以避免对中误差;如2测点位于道路其他位置,则必须按照精密导线网的要求进行布点。A和B 2点作为基线进行平面控制坐标的控制。AB基线必须同车站平面控制进行同精度联测并整体平差,且基线两端点各有至少2条附合导线进行观测。
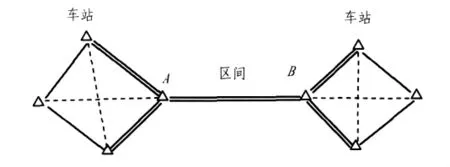
图1 2测站通视下区间控制网形式Fig.1 Control net mode of tunnel section when two survey stations are inter-visible
1.2 2测站不通视
A和B 2测站点布设方式与通视布设方法一样。当A和B 2测站点不通视,则需要进行左右两侧的导线传达,左右两侧测点尽量能相互通视,增加多余测量条件,如图2所示,虚线部分为尽量能够通视。A,B,C,D,E,F等测点尽量采用强制对中观测墩。同样,区间各测点必须同车站平面控制网进行同精度联测并整体平差,且基线两端点各有至少2条附合导线进行观测。

图2 2测站不通视下区间控制网形式Fig.2 Control net mode of tunnel section when two survey stations are disinter-visible
为了突出在车站上布设控制网,区间隧道的控制网如图2和图3所示(如全画上图形太乱,重点不突出,为了突出重点,进行了简化并非只是一个结点)。
1.3 2区间隧道过长(大于3 km)且2测站不通视
A和B2测站点布设方式与通视布设方法一样,且导线传递方法同图1和图2,不同的是,各个测点增加1个副测点,如图3所示。如果主测点C采用强制对中观测墩,在其旁边2~3 m处再布设1个同精密导线要求的测站副点C′,主测点进行主三角锁的传递,副测点进行副三角锁的传递,2控制网分别同车站平面控制同精度联测并整体平差,主副控制网再进行加权平差。

图3 2测站不通视长区间控制网形式Fig.3 Control net mode of long tunnel section when two survey stations are disinter-visible
2 车站控制测量
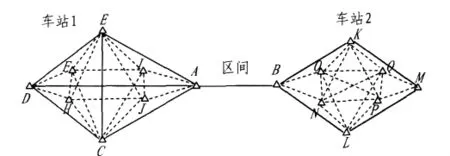
图4 标准车站控制网形式Fig.4 Control net mode of standard Metro station
车站控制测量所有的点都是必须同区间控制网同精度整体平差的,车站控制测量是为联系测量及地面区间控制测量做基础的,车站控制测量的精度直接影响联系测量、洞内隧道控制及盾构出洞的精度,因此,车站控制网的布设及优化就显得非常重要。
目前国内地铁车站主要有标准模式(车站长约200 m,宽约20 m)、换乘模式(十字型、加深型——一般为3层)、始发井模式(长约80 m,宽约20 m——盾构机全长63 m)。
2.1 标准车站模式
车站平面控制网的一个基本原则是尽量有一条线同区间基线平行或同线,因此,每个车站的平面控制网基本上在高处布设3个点并与一基线点组成控制网。在车站两端头左右线各布设一强制对中观测墩,4个观测墩相互通视,如图4所示。A和B为基线测点,C,D,E为车站1高处控制点,F,I,H,J为车站1地面平面强制对中观测墩;K,L,M为车站2高处控制点,O,Q,P,N为车站2地面平面强制对中观测墩。各测站点尽量能够相互通视。
2.2 换乘车站模式
换乘车站一般为横向交叉或纵向平行,横向交叉模式其纵向方向一般为200~400 m,纵向平行模式其纵向方向一般为长200 m,深30 m左右。上海人民广场地铁站目前有1号线、2号线、8号线换乘,共18个出入口,在空间上成“米”字型交叉,是换乘车站的混合模式。本文主要研究盾构区间测量问题,因此车站测量也是从区间盾构测量的角度考虑的。在长度较长的车站,中间部位(近地铁顶板预留洞口附近)左右线各增加1个强制对中的观测墩,如图5所示,左右线上6个点相互通视,此时其车站控制网更为复杂,其他同标准车站模式。
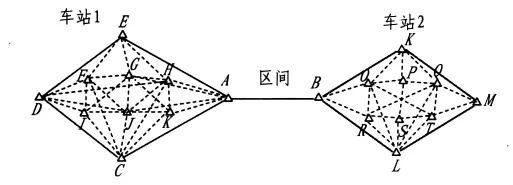
图5 换乘车站控制网形式Fig.5 Control net mode of transfer Metro station
2.3 始发井车站模式
采用始发井模式一般是工期需要,盾构在始发井直接始发,看条件成熟情况采用整机始发或延长管线始发。因此始发井的长度都不大,一般只有80 m左右。除始发井地面采用左右线各2个强制对中观测墩外,高处控制测点需加密,具体视各车站通视情况,本文采用增加1个测点的情况进行分析,如图6所示。

图6 始发井车站控制网形式Fig.6 Control net mode of launching shaft station
3 联系定向测量
GB 50308—2008《城市轨道交通工程测量规范》[7]中联系定向测量提到有5种方法:1)联系三角形法(一井定向);2)陀螺仪、经纬仪、铅垂仪(钢丝)组合法;3)两井定向;4)导线直接传递法;5)投点定向法。现实中联系测量用的最多的有2种方法:一是精密导线直接传递法,二是二井定向。一般来说,只要条件允许,例如有多个井口,井上井下传递点垂直角不大于30°,采用导线直接传递法;如果受条件限制,没有直接传递导线的条件或垂直角大于30°,采用两井定向进行联系测量。
3.1 精密导线直接传递法
精密导线传递的一个基本要求:相邻导线点间以及导线点与其相连的卫星定位点之间的垂直角不应大于30°,视线离障碍物的距离不应小于1.5 m。
采用精密导线直接传递,由于距离短,高差大,一般角度在20°左右,所以地面车站的控制点与传递到车站底板的平面控制点均采用强制对中观测墩,其中地面控制点观测墩尽量降低高度,相反,车站底板的观测墩尽量提高高度(一般不超过1.5 m)。精密导线传递控制网如图7所示,F,H,I,K为地面强制对中观测墩,O,N,P,M是车站底板上的强制对中观测墩平面控制点。地面观测车站底板上的测点必须通过端头井对向观测,以增加观测距离,或通过中层板预留洞口直接测量车站底板测点。车站底板左右2条线作为控制盾构区间控制的2条基线,因此,车站底板2基线上的4个点必须同地面车站区间所有的点进行整体平差,以提高其精度。

图7 精密导线传递控制网形式Fig.7 Control net mode transferred by precise wire
3.2 二井定向
地铁盾构区间不建议使用一井定向方法进行联系测量,因为一井定向的精度很难满足要求,对测量人员熟练程度、仪器精度、操作过程、平差分析都有很高的要求,如角度测量测6测回,每次测3组数据,测角中误差不大于2″,地下起始边方位角角差不大于20″,联系测量最后引起的横向贯通中误差为±36 mm,明显误差较大。如果受现场条件限制,必须采用一井定向的方法,应采用较高精度的测量仪器(如TCA2003、TS30等),多次测量和全自动陀螺经纬仪测定真北方向法来提高精度。
二井定向方法即端头井左右线各进行1次一井定向,传递至底板4个测点,等盾构机进入隧道内约200 m,再进行1次二井定向。如果此时端头井深度较大(大于30 m),就要增加相应的二井定向联系测量,或使用陀螺经纬仪进行定向。常用的全自动陀螺经纬仪为GYROMAT2000,其定位精度高于±3.2″,但是由于GYROMAT2000价格昂贵(100多万),国内用于地铁工程的很少。如果盾构区间特别长或盾构车站特别深,如多个换乘车站交汇点或国家战备需要深井车站、盾构区间,此时在盾构始发端和盾构机到达前200 m使用GYROMAT2000陀螺经纬仪就显得非常必要。
4 盾构区间控制测量
由于条件的限制,盾构区间隧道平面控制网的布设只能布设成导线,因此,要求布设的导线测回数和仪器等级高于精密导线的要求。隧道导线应尽量沿线路中线布设,边长要接近等边,避免长短边相接,尽量布设成多边形闭合导线或主副导线环。由于后期沉降等因素,每1/4区间隧道长应该从车站底板控制点开始重测隧道内控制网。如导线边长较短,在曲线段,测回间仪器和目标应重新对中,以提高精度。每次测量完成,都要同车站底板控制点进行整体平差,各次测量成果再进行加权平差;如区间隧道过长或联系测量条件不是很好,则需要在隧道1/2和3/4处,盾构出洞前200 m、盾构出洞前50 m,采用GYROMAT2000全自动陀螺经纬仪进行定位精度,陀螺经纬仪是能够实现自动寻找真北方向从而测定地面和地下任意测站的大地方向角,不受时间和环境条件限制,且方向角真北方向定位误差不累积,可以中间进行检查、修正测量成果,因此对盾构机到站贯通测量显得尤其重要。
5 盾构机出洞控制测量
洞门钢环最大允许盾构机贯通偏差160 mm,测量规范要求:横向误差限差100mm,纵向50mm。除了测量误差,还有施工误差,净空要求,所以真正留给测量的限差很少,留给控制测量的限差就更少了。盾构机出洞前的控制测量是整个控制测量中最重要的一环,需要对地面区间、车站、联系测量点、盾构始发基点、盾构接收基点全部重新测量并进行整体平差,且需要对隧道区间内导线重新测量,必要时全自动陀螺经纬仪进行定向,确保盾构机顺利出洞。
6 高程控制测量
高程控制测量相对来说简单,使用传统的加测微器的水准仪+铟瓦钢尺就可以满足。但需要注意3点:1)联系测量使用悬吊钢尺法多次悬吊并加尺长改正,尽量使用主体楼梯传递高程进行复核;2)如遇大江大河区间,可以采用三角高程进行传递,传统水准测量复核;3)隧道区间内高程控制测量,每200m复测1次。
7 结论与讨论
根据不同的车站模式、不同的隧道区间模式对地铁盾构控制测量方法进行探讨,通过采用强制对中观测墩、主副导线点、基线控制、整体平差等方法,尤其是上述方法的综合应用,最终使直接导线传递的联系测量法满足了联系测量的要求,基本上满足了目前国内盾构施工控制测量的要求且在很多城市的地铁盾构施工中得到了很好的应用。但是地铁可能会向超深的地铁站(超过40 m)、更长的盾构区间(超过10 km)的方向发展,直接导线传递的联系测量法就会有更多的局限性,二井定向加全自动陀螺经纬仪进行定位方法尤其重要,需要进一步的研究探讨,以满足今后的地铁盾构施工发展需要。
[1] 吕国岭,黄威然,庞红军.盾构自动导向方法的应用研究[J].隧道建设,2005,25(5):11-14.(LV Guoling,HUANG Weiran,PANG Hongjun.Research on application of automatic guidance system in shield tunnelling[J].Tunnel Construction,2005,25(5):11-14.(in Chinese))
[2] 聂爱梅.地铁控制测量检测主要技术方法[J].工程与建设,2008(1):45-47.
[3] 邹勇.简析地铁长隧道控制测量[J].隧道建设,2006,26 (2):27-29.(ZOU Yong.Analysis on control survey of long metro tunnels[J].Tunnel Construction,2006,26(2):27-29.(in Chinese))
[4] 肖书安.国外隧道施工测量技术的现状和发展[J].隧道建设,2007,27(1):76-79,86.(XIAO Shu’an.Present situation and development of aboard tunnel construction surveying technology[J].2007,27(1):76-79,86.(in Chinese))
[5] 丁桦.浅谈特长隧道的控制测量[J].鄂州大学学报,2010 (5):17-19.
[6] 王科锋,黄国涛.长大隧道洞内控制测量实施方案设计[J].能源技术与管理,2008(5):78-80.(WANG Kefeng,HUANG Guotao.Design of inner long-big tunnel control survey[J].Energy Technology and Management,2008(5):78-80.(in Chinese))
[7] GB 50308—2008 城市轨道交通工程测量规范[S].北京:中国建筑工业出版社,2008.
