基于摄像机标定的车辆速度检测方法
2011-03-20李鹏
李鹏
(西安电子科技大学计算机学院,陕西西安710071)
视频监控系统可以获取大量的道路视频信息,应用图像识别等技术可以将外场摄像机所拍摄到的视频图像,通过一系列的视觉算法处理,识别图像中的车辆,计算其位置等参数,进而检测出各种交通流参数,得到静态和动态的交通事件、获得交通流数据,这对保证公众出行安全、顺畅,道路高效运营有着重要意义。
交通流参数计算中一项重要的内容是获取车辆速度,这就需要在实际坐标与图像坐标之间建立一个视觉模型,以便在二者之间进行转换,即进行摄像机标定。通过摄像机标定,实现两个坐标系之间的相互转换,使得图像上的每个像素点均与实际道路中的区域对应,便于计算车辆速度。
摄像机标定是为了确定摄像机所在的实际位置,通过计算其属性参数并建立成像模型,从而确定物体的空间坐标及其图像坐标的对应关系。摄像机模型是对摄像机几何模型的抽象,其成像过程是对空间点的影像变化,而摄像机参数则决定了变换的具体映射方式,只要知道了这些参数和空间点的坐标就能够计算出相应的像点坐标[1]。
摄像机的模型是光学成像的几何关系,最简单的模型是线性模型,也称为针孔模型[2]。摄像机成像模型通过成像透镜,将实际坐标系中的场景投影到二维图像平面上。在二维图像中每一个像素的颜色信息可以反映该物体该点在实际空间的反射强度,该像素在图像坐标中的位置与其在实际空间位置的集合位置有关系,摄像机成像模型即决定了这些位置的相互关系[3]。
传统的摄像机标定方法是在一定的摄像机模型下,利用特定标定物,对其进行图像处理,利用一系列数学变换和计算方法,求取摄像机模型的内部和外部参数[4]。传统的摄像机标定方法需要使用尺寸等参数已知的标定物,标定物上特定点的三维坐标已知,通过建立这些点与其图像点之间的对应关系,经过计算获取摄像机的各种内外部参数。常见的传统摄像机标定方法有:A bdel-Aziz和Karara于1971年提出的直接线性变换方法[4];Tsai提出的基于径向一直约束(RAC)的两步法标定方法[5];Martins等提出的双平面模型标定法[6];张正友标定法和孟晓桥、胡占义提出的圆标定法等。传统的摄像机标定法可以获得较高的标定精度,但不适应于不能使用标定物的场合。
1 速度检测算法
高速公路中测定车辆的速度,无法对摄像机都进行传统标定,所以也无法直接使用传统的摄像机标定算法进行坐标间的转换。文中利用高速公路施工规范,通过对速度检测区进行网格划分获得图像中标定物的参数信息,得到图像坐标与车辆空间坐标的对应关系。
在摄像机的透视投影模型中,实际坐标下的空间点M与图像坐标系下的图像平面上的点m有一定的变换关系,这种变换关系是通过投影矩阵P进行投影的,如式(1)所示

式中,m=(u,v,1)T是图像点的齐次坐标;M=(X,Y,Z,1)T是空间点的齐次坐标。若Z=0,即取平面为xoy平面,式(1)可变为
设H=(p1,p2,p3),M=(X,Y,1)T,则式(2)可表示为

通过式(3),即可将图像中任意一个像素点对应到其实际坐标平面上的一点,即可实现图像坐标与实际坐标的转换。
由式(3)可以看出,每一对实际坐标与图像坐标的对应点可以得到两个方程,经过变换之后,方程如式(4)所示

其中,H'=(h1,h2,h3,h4,h5,h6,h7,h8,h9)T,是将单应矩阵变换为一维矩阵后的结果。只需4组对应点,且任意三点不共线,即可确定单应矩阵,其计算方程如式(5)所示

其中
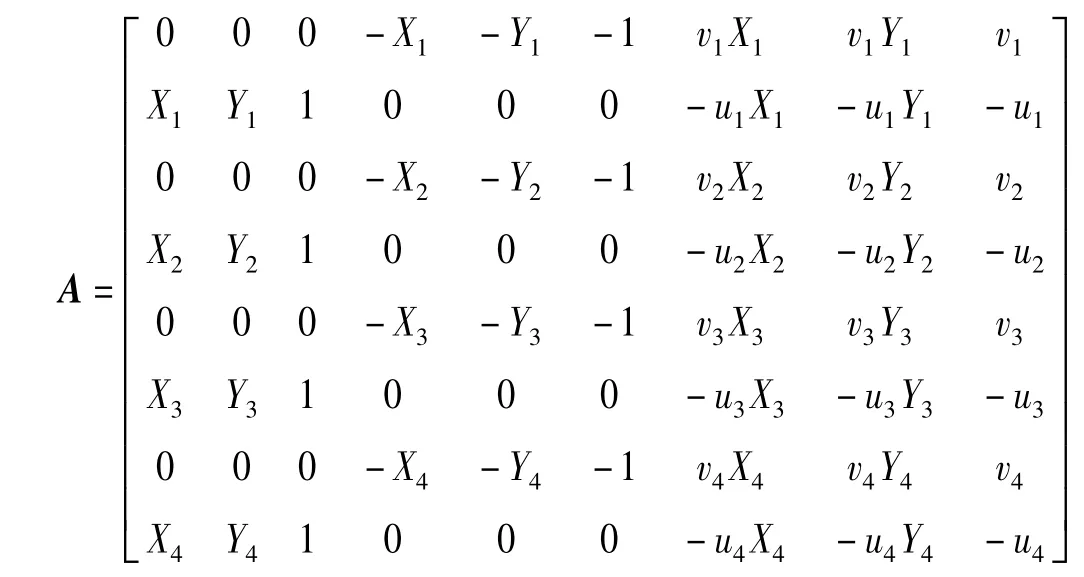
利用奇异值分解法求方程(5)的解,即可得到单应性矩阵H。单应矩阵求得之后,根据像平面的坐标即可求得实际坐标系中的坐标,再根据两点之间的距离公式即可求得两点的距离。网格划分效果如图1(a)和图1(b)所示。
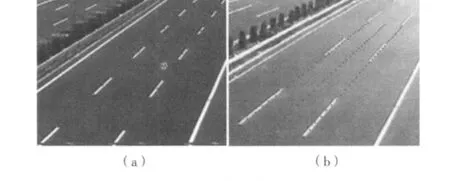
图1 单应矩阵网格划分效果图
2 结果及分析
为得到真实的车速标准,首先在检测场景内使用测试车辆,以车辆速度表为参照分别以60 km/h、90 km/h和120 km/h通过检测区域,为保证测试的有效性,测试车辆将以设定时速在不同场景中行驶10趟,在车辆行驶过程中进行全程录像。对录像内容进行测试,3种车速情况下的测试结果分别如图2(a)、图2(b)和图2(c)所示。
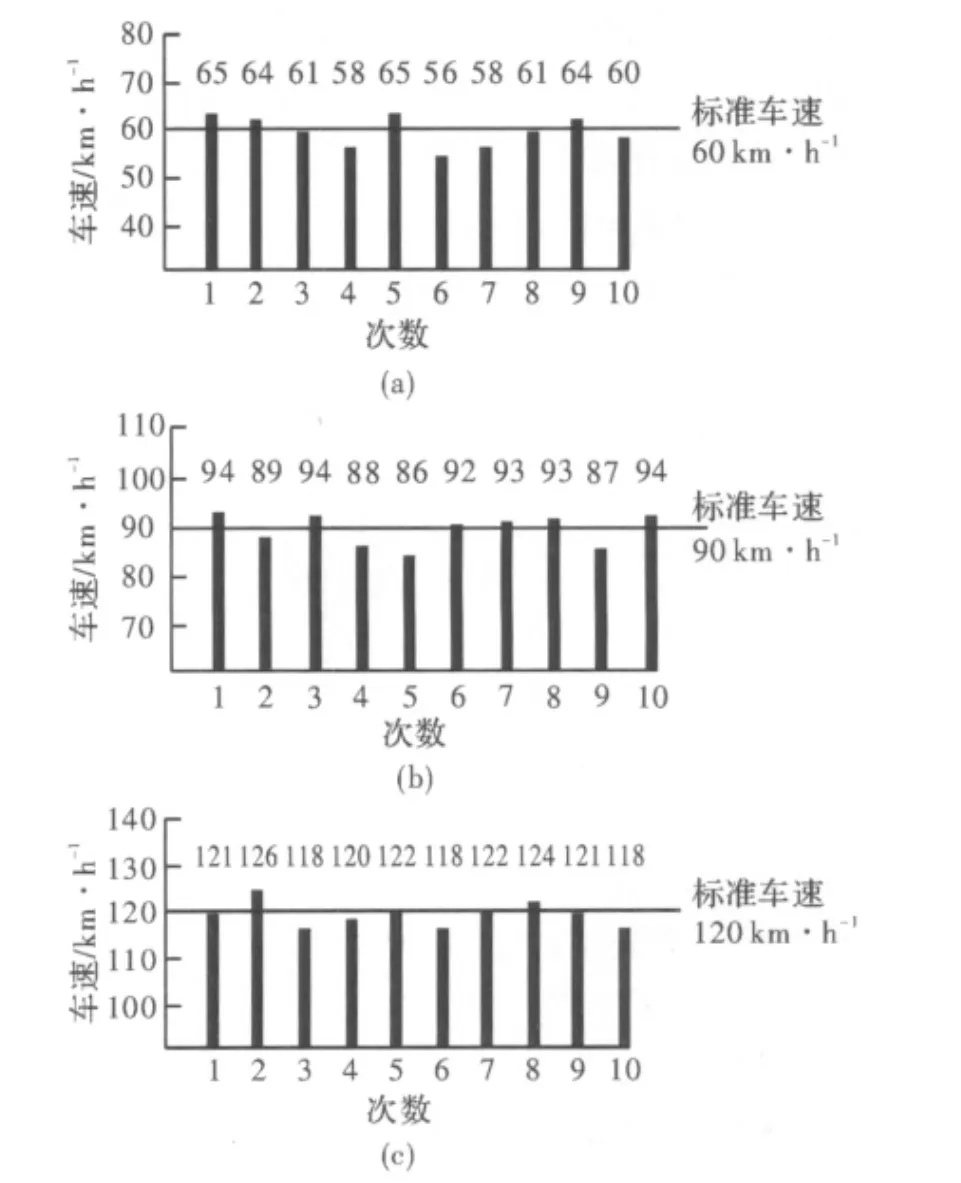
图2 车速测试结果图
测试数据分析如表1所示,其中偏差率为检测车辆车速与测试车速差值的绝对值与真实车速的比值。
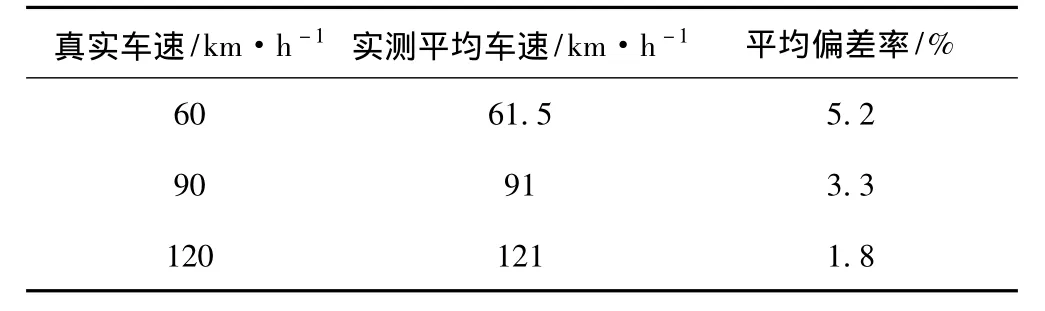
表1 车速测试分析
从图2中可以看出,车速误差不超过10%,检测精度满足视频监控系统中对于交通流参数的要求。如表1所示,出现偏差率随车速增高而降低的情况,这是由于车速较慢时,车辆在标定网格内的行驶距离较短,图像采集、网络传输或服务器处理速度等微小的时间差异都会对速度的计算产生影响,所以会出现车速较低时,偏差率较大的情况。
3 结束语
提出了基于平面单应性矩阵的摄像机标定算法,通过摄像机标定对检测区域进行网格划分从而进行车辆速度的检测,基于这种算法可以实时获取交通流参数中有关车辆速度的信息。实验结果显示,该方法易于实现,能做到实时处理,平均车速检测准确率达90%以上。
[1] 邹凤娇.摄像机标定及相关技术研究[D].成都:四川大学,2005.
[2] 马颂德,张正友.计算机视觉——计算理论与算法基础[M].北京:科学出版社,2003.
[3] 黄侃.计算机立体视觉中的摄像机标定算法的研究与应用[D].沈阳:沈阳工业大学,2007.
[4] ABDEL-AZIZ Y I,KARARA H M.Direct linear transformation into object space coordinates in close-range photogrammetry[C].Proc Symposium on Close-Range Photogrammetry,1971:1-18.
[5] TSAI R Y.An efficient and accurate camera calibration technique for 3D machine vision[C].Proc CV PR'86,1986:364-374.
[6] MARTINS H A,BIRK J R,KELLEY R B.Camera models based no data from two calibration planes[J].Computer GraphicsandImagingProcessing,1981,17(2):173-180.