基于自由尾迹的共轴直升机航向 /总距解耦分析
2011-03-16徐冠峰
徐冠峰 陈 铭
(北京航空航天大学 航空科学与工程学院,北京 100191)
基于自由尾迹的共轴直升机航向 /总距解耦分析
徐冠峰 陈 铭
(北京航空航天大学 航空科学与工程学院,北京 100191)
共轴式直升机的航向操纵主要依靠上下旋翼的总距差动实现,在总距和航向操纵上有较强的耦合.利用自由尾迹算法对在研小型共轴式直升机悬停时的航向和总距间的解耦进行了计算,得到了悬停时航向与总距操纵时上下旋翼的总距配合曲线,总结了解耦控制的特点并根据数值计算结果拟合出了近似的解耦函数,计算结果对飞控系统的设计具有重要的指导意义.
自由尾迹;共轴式直升机;操纵解耦
共轴式直升机与单旋翼直升机相比,具有结构紧凑,悬停效率高等特点.但是其航向操纵需要通过改变上下旋翼总距差来实现,与单旋翼直升机相比显得更为复杂;同时,由于结构尺寸小,航向转动惯量小,使得共轴式直升机对于航向控制有着更高的要求.
共轴双旋翼直升机的航向操纵形式分为:全差动、半差动、桨尖制动、磁粉制动.目前北航在研的小型共轴式直升机采用半差动的航向控制方式,即依靠改变下旋翼的总距来进行航向操纵.该直升机在进行飞行试验时,航向和总距操纵耦合现象明显,为了使其有更好的操纵品质,需要依靠飞控系统对航向和总距输入进行解耦.基于这个目标,本文利用自由尾迹模型,对该机悬停状态航向与总距耦合特性进行了初步分析,为飞控系统的开发提供必要的理论依据.
1 计算方法
本文采用传统的自由尾迹计算方法,简述如下.
1.1 自由尾迹模型
桨叶气动模型采用升力线理论,即用一根附着涡线代替桨叶,桨叶沿展向分成若干小段,在每一小段中附着涡环量为常数,附着涡环量的径向变化引起尾随涡系从桨叶后缘拖出;控制点布置在各网格的 3/4弦线中点处,通过在控制点满足不穿透边界条件,可求出附着涡环量沿径向的分布,从而确定气动特性.
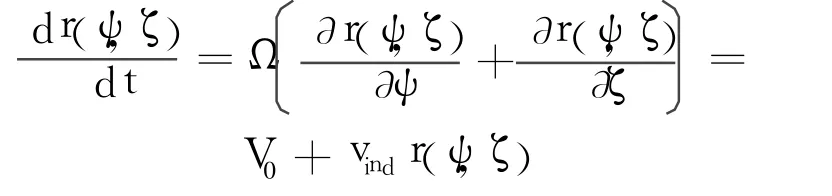
对于尾迹的变化本文采用全展向自由尾迹模型来模拟,这些尾迹全部随诱导速度场自由移动,并且具有相同的节点数.当自由尾迹随当地速度自由移动时,可以得到控制方程为

其中,ψ是桨叶在旋转过程中的方位角;ζ是尾迹节点寿命的尾迹角.根据自由尾迹的定义,尾迹中任何节点都在诱导速度场中自由地流动,当前速度为前飞速度与诱导速度两项的和,所以,上式可以表达为
1.2 涡核处理
为了提高求解精度,防止计算时的数值问题,对涡线进行了涡核修正,本文采用文献[1]给出的一个基于尾迹试验的涡核修正模型,其切向速度分布为

其中,Γ为涡线的环量;h为计算点到涡线的垂直距离;rc是涡核半径.为模拟涡核随时间的耗散效应,允许涡核半径随寿命角变化,变化规律如下:

其中,rini为初始涡核半径;i为涡点按寿命角排序的编号.
同时,针对共轴式直升机,在计算中,为了模拟上旋翼涡线经过下旋翼平面后的桨涡干扰,令下旋翼以下的涡线涡核半径增加 20%,即

1.3 求解方法
为了对涡线控制方程进行数值求解,首先对控制方程进行离散.用五点中心差分方法来离散控制方程[2],为了让每次环量和诱导速度变化传递到整个流场,在更新环量和诱导速度后,进行 N(N为自由尾迹圈数)圈涡点移动迭代,此时不更新环量和各点的诱导速度,在涡线形状充分改变后再计算环量与诱导速度.在迭代方法上采用两次预报校正算法.
为了进一步提高计算速度和计算稳定性,采用了文献[3]中提出的方法,将引起尾迹发散的诱导速度分量去掉.计算表明,该方法能有效地提高计算速度,而且不会对计算精度有显著影响.
1.4 算例验证
为了验证算法的可行性,对文献[4]中的旋翼进行了计算分析.图 1为收敛时的涡线形状,为清晰上下旋翼各画出了一根涡线.图 2为旋翼在悬停状态下扭矩-拉力系数曲线的计算结果与试验结果对比.可见,该算法具有较好的精确度,在大拉力系数情况下误差增大,可能是因为拉力系数增大时,上下旋翼之间干扰加大.
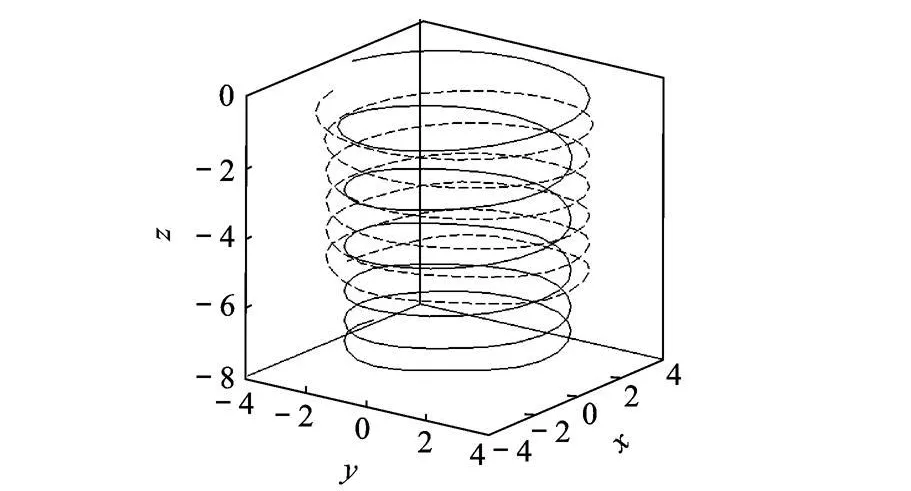
图1 共轴旋翼涡线计算结果

图2 共轴式旋翼悬停扭矩-拉力系数曲线
2 计算结果与分析
在研样例直升机主要几何参数如表 1所示.
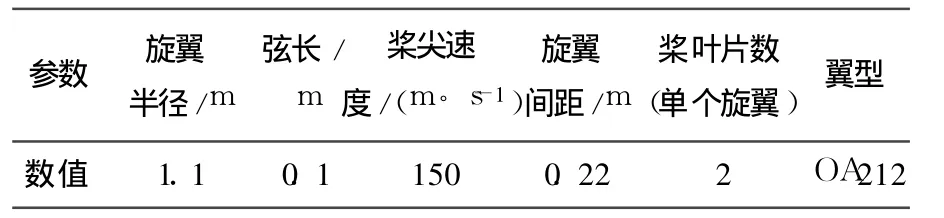
表 1 FH-1直升机旋翼主要数据
在试飞过程中明显感觉到,总距操纵和航向操纵之间存在严重耦合.在悬停状态,若增距爬升,则飞机右转.这是因为旋翼加距时,上旋翼对下旋翼干扰加大,下旋翼扭矩的增加少于上旋翼,故产生一个右转的偏航力矩.同样的,若减距下降则飞机左转.当进行航向操纵时,左转需要下旋翼加总距,飞机会爬升,右转则飞机会下降.以下分别对两种耦合做了计算与分析.
经过飞控系统处理后的差动操纵可量化表示为

其中,φu为上旋翼总距;φl为下旋翼总距;φi为总距操纵输入;φy为航向操纵输入;dφ为上下旋翼初始总距差;F和 G分别为经过飞控系统处理后的总距舵机和航向舵机的实际输出量,需要通过分析计算确定.
2.1 总距-航向操纵耦合
由于上下旋翼之间的相互干扰,使下旋翼效率下降,为了保持航向稳定,即上下旋翼扭矩平衡,下旋翼总距一般要大于上旋翼.但是直升机在不同飞行状态下,干扰情况不同,则在不同总距下,为了保持扭矩平衡,上下旋翼的总距差也应当不同.但是由于半差动操纵方式在机械结构上的局限性,使得在操纵总距时上下旋翼改变相同的桨距,这样就不可能保证在各个总距位置偏航力矩为 0,即为前文所说的总距-航向耦合.为此,必须在总距操纵过程中,通过飞控系统自动对下旋翼总距进行解耦补偿.
本文首先计算了在不同总距情况下,上下旋翼的配平总距差.如图 3所示,图中的总距差为上下旋翼扭矩平衡时,下旋翼总距与上旋翼总距的差值.可见,随总距加大,总距差值先迅速增加,7°左右达到最大后有所下降.
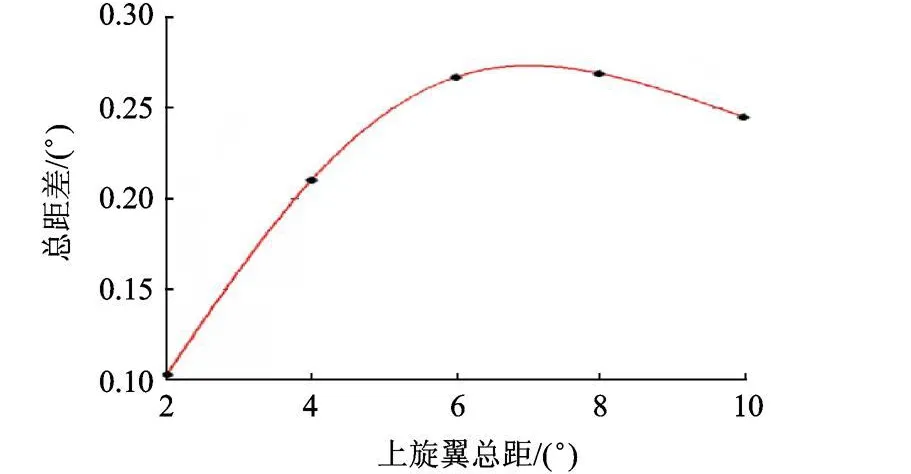
图3 在研样例机总距操纵航向解耦曲线
同时,对文献[4]中的共轴旋翼进行了计算,其总距补偿曲线如图 4所示.
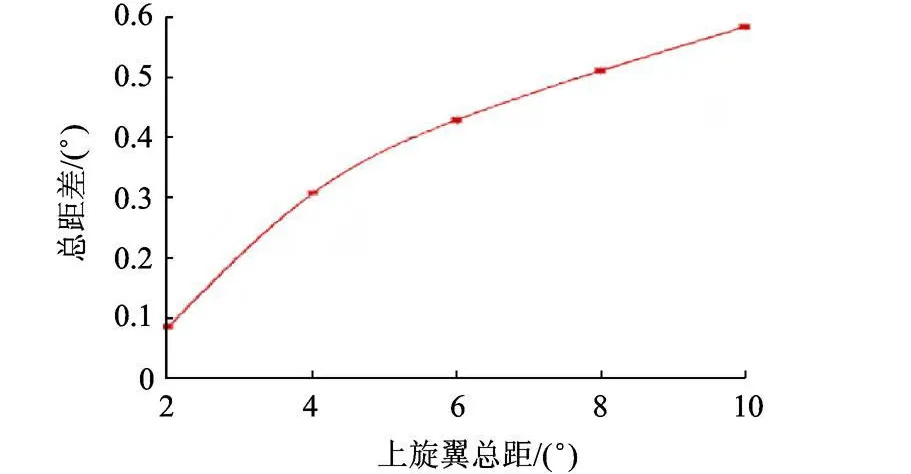
图4 文献[4]算例总距操纵航向解耦曲线
对比两个旋翼系统的计算结果可发现,不同的旋翼系统在总距补偿上需要的量,甚至补偿量变化趋势都是有所区别的.对于在研直升机总距为 7°时补偿量出现拐点的现象,还需进一步分析研究.
在工程应用中,可将直升机的主要飞行状态,即总距在 4°~8°的计算结果拟合为 2次曲线,这样可以方便地通过调整 3个参数就可以改变整个曲线的形状,大大降低了飞控计算机计算和数据储存开支,拟合方程如下.

其中,a1=0.27;k1=0.0066;b1=7.0;dφ即为总距操纵时的航向操纵补偿量.
2.2 航向-总距操纵耦合
半差动式操纵在航向-总距操纵上的耦合更加严重.在航向操纵时,高度方向会有耦合响应.文献[5-6]中对此耦合进行了相应的分析.在无解耦航向增稳陀螺作用下,直升机在航向上能保持稳定,但高度上不停地上下“跳动”.
为此,计算了在研小型直升机在上旋翼总距为 4°,6°与 8°3种情况下的补偿曲线.即在改变下旋翼总距进行航向操纵时,上旋翼总距补偿一定角度,保证总升力不变,消除高度方向上的耦合响应.图 5为总距补偿量曲线,图 6为引入补偿后的偏航力矩曲线.
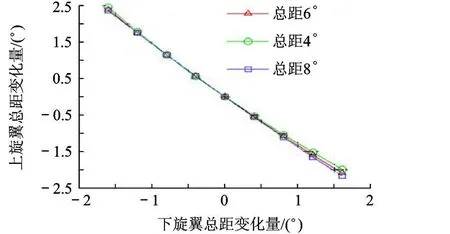
图5 FH-1航向操纵总距解耦曲线
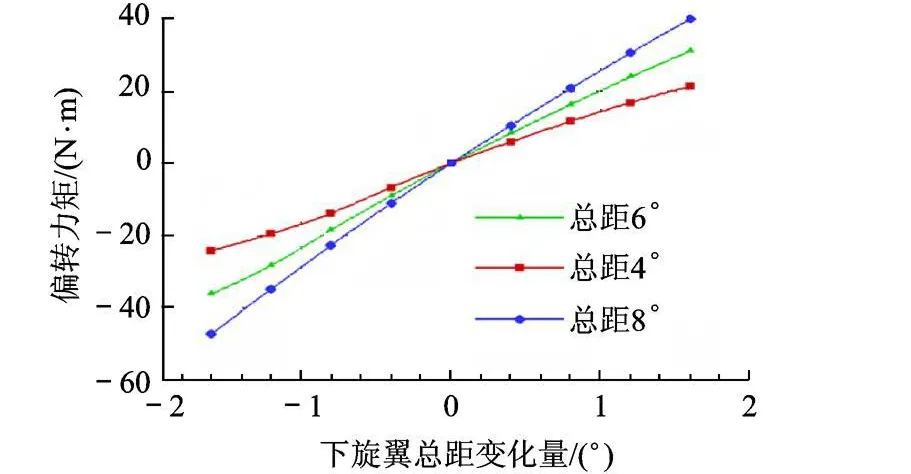
图6 在研样例机航向操纵效能曲线
从计算结果可以发现,dφu与 dφl可看做线性关系.下旋翼在减距情况下补偿量略大于增距情况.在不同总距情况下,补偿量曲线基本一致.在 dφl较大时,dφu随总距增大而略有增加.
另外,计算结果也反映了不同总距下的补偿量曲线基本一致,因此,在飞控系统中可以不考虑总距变化对补偿曲线曲率的影响,即对各总距情况均令

其中,k2=-1.5;k3=-1.3.
由图 6可知,引入补偿后,在不同方向的航向操纵中,操纵效能有所不同,即下旋翼总距在正负方向变化同样的角度时,配平后的偏航力矩大小不同,在下旋翼减距方向力矩略大.这主要是由下旋翼减距时,上旋翼补偿量较大造成的.同时,在不同总距情况下,操纵效能也有很大差别.总距越大,操纵效能越大.8°总距下,同样的航向操纵,偏航力矩约为 4°情况下的两倍.产生这种情况的原因是航向操纵即偏航力矩主要来自于旋翼诱导阻力的变化,总距越大,升力越大,在桨叶总距变化相同角度情况下,诱导阻力增量越大.
为了确保飞控系统的可靠工作,应考虑航向操纵效能变化对控制参数的影响.在 4°~8°间,操纵效能的变化仍能做线化处理,由计算数据可得
其中,k2=-1.5;k3=-1.3;a2=20.20;b2=6.0;k4=2.8.
2.3 总距航向混控下的上下旋翼总距
综上所述,对于半差动形式的在研 FH-1共轴无人直升机,可得到在一定总距与航向混合操纵下,上下旋翼的总距为
3 结 论
经过分析计算,得到了在研共轴直升机在悬停状态下的总距与航向操纵时的解耦曲线,并可得出以下结论:
1)共轴直升机半差动式控制方式在总距操纵和航向操纵间耦合严重.需要利用飞控系统进行解耦操纵,提高操纵品质.
2)半差动式操纵虽然有其机械结构局限性,但通过调整飞控系统参数,能够较好地适应不同情况下的交叉耦合特性.
3)在总距-航向耦合上,不同的旋翼系统计算结果相差较大,还需要做进一步的深入研究,以得到更具普遍性的结果.
4)在航向-总距耦合上,可对在研直升机做一定的线化处理,便于飞控解耦计算.在正负航向操纵下,解耦参数有一定的不对称性.在不同总距情况下,航向操纵效能相差较大.
References)
[1]Bagai A,Leishman JG.Rotor free wake modeling using a pseudo implicit technique-including comparisons with experimental data[J].Journal of the American Helicopter Society,1995,40(3):29-41
[2]李春华,徐国华.悬停和前飞状态倾转旋翼机的旋翼自由尾迹计算方法[J].空气动力学学报,2005,23(2):152-156 Li Chunhua,Xu Guohua.The rotor free-wake analytical method for tiltrotor aircraft in hover and forward flight[J].Acta Aerodynamica Sinica,2005,23(2):152-156(in Chinese)
[3]曾洪江,胡继忠.涡核对自由涡计算的影响研究[C]//唐正飞.第二十届全国直升机年会论文集.四川宜宾:[出版者不详],2004:553-559 Zeng Hongjiang,Hu Jizhong.Effect of core radius in free wake calculation[C]//Tang Zhengfei.Proceedings of the 20th National Helicopter Annual Forum.Yibin,Sichuan:[s.n.],2004:553-559(in Chinese)
[4]Harrington R D.Full-scall-tunnel investation of the static-thrust performance of a coaxial helicopter rotor[R].NACA TN-2318,1951
[5]陈铭,胡继忠,曹义华.共轴式直升机半差动航向操纵的动态响应分析[J].北京航空航天大学学报,2002,28(5):524-527 Chen Ming,Hu Jizhong,Cao Yihua.Dynamic response analysis of direction control for a semi differential coaxial helicopter[J].Journal of Beijing University of Aeronautics and Astronautics,2002,28(5):524-527(in Chinese)
[6]陈铭,胡继忠.共轴式直升机全差动航向操纵的动态响应分析[J].飞行力学,2001,19(4):26-30 Chen Ming,Hu Jizhong.Analysis of dynamic response of direction control for a full-differential coaxial helicopter[J].Flight Dynamics,2001,19(4):26-30(in Chinese)
(编 辑 :李 晶)
Decoupling analysis between yaw and collective pitch controls o f coaxial helicopter using free wake arithmetic
Xu Guanfeng Chen Ming
(School of Aeronautic Science and Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
The yaw control of coaxial helicopters is gained from the differential control of collective pitches of up and down rotors.Hence,a coupling phenomenon can be found.Employing the free wake arithmetic,the aerodynamic analysis for the small coaxial helicopter was made,mainly focusing on the coupling between yaw and collective pitch controls in hover flight.The computation showed the relationship between collective pitches of two rotors when the yaw control or collective pitch control was given.From those results,the characteristics of decoupling control could be identified.And those data was transformed into several simple functions using the curve fitting method.These results will be significant for designing the flight control system.
free wake;coaxial helicopter;decoupling control
V 211.52
A
1001-5965(2011)02-0249-04
2009-12-09
徐冠峰(1980-),男,河南南阳人,博士生,bryantfeng@126.com.