基于空中对准过程的在线标定及优化设计
2011-03-16张小跃杨功流张春熹
张小跃 杨功流 张春熹
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
基于空中对准过程的在线标定及优化设计
张小跃 杨功流 张春熹
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
光纤陀螺惯组输出误差影响武器系统导航精度,为了弥补地面标定的不足,利用机载制导武器发射前空中对准过程进行光纤捷联系统在线标定.介绍了光纤捷联系统空中对准/在线标定系统模型,基于此设计卡尔曼滤波器;针对某机载航空制导炸弹工作过程进行了对准过程中误差激发与对导航精度影响的仿真分析,并基于此进行了滤波器优化设计;最后进行了优化设计前后导航精度仿真比较,仿真结果显示:完成空中对准/在线标定优化设计后,光纤捷联系统纯惯性导航精度得到提高.
光纤陀螺;空中对准;在线标定;优化设计
光纤陀螺具备一系列传统机电陀螺不具有的优点[1],同时,光纤陀螺也存在随机误差影响系统精度等不足之处[2].光纤惯组历次开机使用时随机误差无法通过地面转台标定进行有效补偿,而在制导武器发射之前的空中对准过程中需要引入机载高精度主惯导导航信息,同时,对准过程中载体机动也对惯组误差有一定的激发作用.因此可以考虑利用空中对准过程同时进行惯组输出误差在线标定与补偿,这对于提高惯导系统实际使用精度具有重大意义.本文采用了空中对准过程中同时进行光纤捷联惯组在线标定的方法,以某机载航空制导炸弹工作过程为例进行了滤波器优化设计,并对优化设计前后导航精度进行了仿真比较.
1 空中对准 /在线标定模型
基于空中对准过程的在线标定模型主要包括惯组误差模型、系统误差模型、量测模型、标定补偿等几个部分,在文献[3-5]中对各部分分别有详细介绍与推导过程,下面将主要部分列出,作为本文基本理论基础.
1.1 系统误差模型
光纤惯组误差模型[3-4]:
1.2 量测模型
以载机主惯导输出经度、纬度、水平速度作为外部信息源[6],量测量计算如下.
位置误差 Δθx,Δθy可以计算如下:


1.3 标定补偿
对准过程中卡尔曼滤波器估计所得惯组误差状态代入式(1)、式(2)即可计算得到误差估计值将此估计值对惯组输出比力、角速率数据进行补偿得到导航解算所用比力、角速率数据如下:

基于上述基本模型,可以通过空中对准过程中引入的载机高精度主惯导位置、速度信息,同时进行光纤惯组输出误差在线估计与补偿,完成在线标定过程.
2 优化设计
从第 1节中可以看出,基于空中对准过程的在线标定模型中共包含了光纤惯组 24个误差状态,系统误差模型共计有 33维.理论上讲,通过引入载机高精度主惯导导航信息,并利用空中对准机动过程对惯组误差的激发,基于最优估计理论可以对被激发部分惯组误差进行准确估计.但是由于系统模型、惯组模型等均是基于部分假设、忽略小量、采取线性化措施等而得到的理想模型,这与使用过程中的实际情况有所差别,导致在线标定过程中并未能达到理想的准确估计效果.因此,有必要针对空中对准实际过程,分析误差项被激发情况,进行在线标定滤波器优化设计,使得被激发误差项得到更为精确的估计,更好地提高系统实际使用精度.
下面以某机载航空制导炸弹空中对准过程飞行轨迹进行仿真分析,以提高捷联系统最终导航定位精度为目标,进行滤波器优化设计.
仿真过程中,捷联惯导按对准过程飞行轨迹进行纯惯性导航,惯组性能指标设置即各项误差源如下:
光纤陀螺:零偏误差为 0.5(°)/h,失准角为60″,标度因数误差为 1×10-4.
加速度计:零偏误差为 500μg,失准角为60″,标度因数误差为 5×10-4.
捷联惯导按对准飞行轨迹完成纯惯性导航后得到导航误差,将各项误差源对导航误差的影响进行统计分析,得到各主要误差源及其对导航误差的影响比例,如表 1所示.

表 1 主要误差源及其对导航精度影响
根据以上误差分析结果,空中对准/在线标定滤波器状态量重新选取如下:由33维变换成 22维.即滤波器状态量中只保留惯组输出误差中各主要被激发误差项,这样在空中对准/在线标定过程中更有利于各主要被激发误差项的精确估计,提高捷联系统导航精度.
3 仿真验证
在相同条件下,分别采用未经过优化设计的对准/标定滤波器和经过优化设计的对准/标定滤波器完成对准过程,然后按机载航空制导炸弹导航飞行轨迹完成纯惯性导航过程,比较导航过程中输出误差.
仿真过程中,除前面描述的光纤惯组误差即零偏误差、失准角和标度因数误差外,另外再加入部分误差源如下:
加速度计 g2项:20μg/g2;
加速度计相关噪声:15μg,相关时间 1800 s;
陀螺相关噪声:0.05(°)/h,相关时间300s;
初始姿态误差:水平:5°,方位:2°.
仿真过程中,对准引入主惯导参数精度如下:
定位误差:10m;
速度误差:0.1m/s.
比较分别用未经过优化和经过优化的滤波器完成对准/在线标定过程后的惯性导航飞行过程中主要误差变化,图 1给出了飞行过程中优化设计前后水平 z向位置误差变化,图 2则给出了优化设计前后 x向位置误差变化.

图1 优化设计前后水平z向位置误差变化
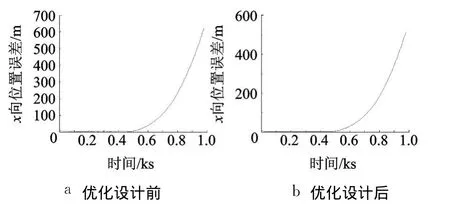
图2 优化设计前后水平x向位置误差变化
将导航终止时刻捷联惯导输出姿态误差、水平位置误差和速度误差列于表 2中.

表 2 优化设计前后系统导航误差比较
从以上仿真结果可以看到:航空制导炸弹捷联惯导系统空中对准/在线标定卡尔曼滤波器经过优化设计后,系统完成对准过程后的惯性导航精度得到提高.
4 结束语
本文基于误差激发与对导航精度影响分析,针对利用空中对准过程的光纤捷联系统在线标定方法进行了优化设计,这种优化设计降低了系统滤波器维数,同时,仿真结果表明完成空中对准/在线标定优化设计后,光纤捷联系统纯惯性导航精度得到提高.
References)
[1]陈小凤,关政军.船用光纤陀螺捷联航姿基准系统[J].大连海事大学学报,2005,31(1):26-28 Chen X iaofeng,Guan Zhengjun.Fiber optic gyro strapdowm attitude and heading referencesystem for ship[J].Journal of Dalian Maritime University,2005,31(1):26-28(in Chinese)
[2]徐帆,马广富.基于 ARMA模型的光纤陀螺随机漂移滤波方法研究[J].传感器与微系统,2007,26(2):31-32,36 Xu Fan,Ma Guangfu.Investigation on filter method of FOG drift data based on ARMA model[J].Transducer and Microsystem Technologies,2007,26(2):31-32,36(in Chinese)
[3]Rogers R M.Applied mathematics in integrated navigation systems[M].Second Edition.Reston:American Institude of Aeronautics and Astronautics,2003:73-107
[4]Yang C,Lin C F,Tarrant D,et al.Transfer alignment design and evaluation[R].AIAA-93-3892,1993
[5]张小跃,张春熹,宋凝芳.基于组合导航技术的光纤捷联系统在线标定[J].航空学报,2008,29(6):1656-1659 Zhang Xiaoyue,Zhang Chunxi,Song Ningfang.Online calibration of FOG strapdown system based on integrated navigation technology[J].Acta Aeronautica et Astronautica Sinica,2008,29(6):1656-1659(in Chinese)
[6]韩军海,陈家斌.舰船惯导系统传递对准技术[J].火力与指挥控制,2004,29(增刊):6-9 Han Junhai,Chen Jiabin.The summarization of transfer alignment inmarine application[J].Fire Control&Command Control,2004,29(Supplement):6-9(in Chinese)
(编 辑:赵海容)
Online calibration based on in-flight alignment and optima l design
Zhang Xiaoyue Yang Gongliu Zhang Chunxi
(School of Instrument Science and Optoelectronic Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
The navigation system precision was influenced by the output error of fiber optic gyro(FOG)inertialmeasurementunit(IMU).In order to complement ground calibration,FOG strapdown inertial navigation system(SINS)online calibration was carried out in airborne guidance weapon in-flight alignment process.In-flight alignment/online calibration model of FOG-SINSwas introduced,based on which the Kalman filter was designed.Simulation analysis of error excitation and influence on navigation precision were carried out,and filter optimal design was comp leted.At last,the simulation results with orwithoutoptimal design were obtained which indicated that:FOG-SINS free inertial navigation precision was improved after optimal design.
fiber optic gyro;in-flight alignment;online calibration;optimal design
V 249.3
A
1001-5965(2011)02-0220-03
2009-12-03
航空科学基金资助项目(2007ZC51040)
张小跃(1982-),男,湖南益阳人,讲师,zhangxiaoyue@buaa.edu.cn.
