新型复合控制数字逆变电源研究
2011-03-12蒋传荣
蒋传荣
(海华电子企业(中国)有限公司,广州 510656)
1 引言
PID控制方法对阶跃信号可以做到无静差跟随,具有较快的动态响应特性和较强的鲁棒性,但将其数字化后应用到正弦波逆变电源系统中,由于各种因素的影响,其稳态输出特性差。
重复控制的思想是基于内模原理的一种控制方法。它含有正弦的内模,不管什么形式的信号,只要其频率是基波频率的倍数,则该输出就会对其进行逐周期累加。既便输入信号衰减为零,该内模仍然会逐周期输出与上周期相同的信号。因而可以看出该重复控制与积分环节的区别在于:积分是对误差进行连续时间的累加,而重复控制是对误差以周期为步长的累加。重复控制虽然对周期性扰动有很好的抑制能力,但是对非周期的扰动的响应速度慢,因此,抑制能力较差。在很多情况下,如突加负载、突减负载时,扰动是阶跃的、非周期的,但是重复控制器仍然将扰动周期出现的误差在随后的周期中试图来纠正,但是在随后的周期中扰动并不存在,因此导致控制错误。与此相反PID控制含有的积分环节1/s是描述阶跃信号的数学模型,因此含有积分环节1/s的系统对阶跃指令可以做到无静差跟踪。本文提出了一种基于重复控制与PID控制相结合的控制方法,该控制方法集成了两种控制方法优点,既具有高质量的稳态波形,又具有对非周期负载扰动有较快的响应速度。
2 工作原理
理想的重复控制器其极点分布在虚轴上,处于临界稳定状态,系统的稳定性较差。为了保证稳定性,重复控制通常采用改进型内模,如图1所示的重复控制器模块。图1中:S(z)为补偿器,用来对功率级的特性进行补偿;Q(z)重复发生器的衰减因子,通常|Q(z)|<1用于提高系统的稳定性,克服对象模型不准确对控制稳定性的影响。则该重复控制器的传递函数为
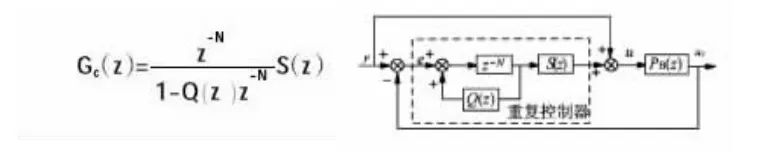
图1 重复控制器
由传递函数可以看出重复控制的误差信号,在经过N个时钟周期的延迟才会反映到输出的控制信号上,因此其负载瞬态响应特性差。因为提高非周期扰动是重复控制必须解决的问题,根据内模原理,要完全消除阶跃信号扰动,则在控制传递函数中必须包含1/s传递函数。可以考虑将PID控制器或者零极点配置控制器融合到重复控制中以提高对非周期扰动的响应速度。因此,考虑采用如图2所示的控制策略。

图2 复合控制框图
这样反馈控制信号由两种控制方法共同产生,因此,控制效果会兼有两种控制方法的各自特点。由于控制信号始终都是由两个控制器共同产生的,因此,在非周期扰动下重复控制器产生的错误的控制信号仍然会对系统产生影响。同理,我们可以想象到在周期性负载冲击下PID控制器也会产生错误的控制信号,但是该错误信号可以在重复控制器多个周期识别后给予抵消,因此,影响相对较小。通过以上分析可知,在周期性或者非周期性两种不同的负载扰动冲击下,如果可以仅使其中正确的一种控制信号输出给受控目标,则可以避免错误的控制信号对系统的影响,如图3所示。这其中最关键的一点就是控制器对周期性和非周期性两种扰动信号的识别问题,如果可以做到正确识别,以上的控制思想就可以实现了。

图3 新型复合控制框图
如图4所示,为突加、突减负载时输出电压、输出电流和控制输出的响应波形。由图4可以看出,扰动是非周期的、一次性的,但是重复控制器仍然将扰动周期出现的误差在随后的周期中试图来纠正,但是在随后的周期中扰动并不存在,因此,导致输出的波形动态响应比较差。实现周期性和非周期性两种扰动信号识别的最简单方法是做如下判断,即|e(n)-e(n-N)|>emax
即当前的误差信号与上一个周期的误差信号的差值的绝对值是否大于给定的某个值emax,当大于emax时认为系统出现了非周期性扰动,在随后的一个周期内采用PID控制器输出的控制信号,同时将重复控制器的输出信号置零;否则将PID控制器的输出置零,仅采用重复控制器进行控制。采用本控制方法的通过仿真得出PID控制可以在短时间内将非周期扰动的影响消除,并且从检测到非周期扰动出现随后的一个周期内由PID控制器产生控制信号,而在此时间段内重复控制器需将以前重复积累的误差信号清除,而仅采用PID控制的这个周期的信号开始重新积累误差,从而完全消除了目前不存在的以前积累的误差的影响。
通过实验可看到输出波形的动态响应,由图4可以看出重复控制在负载移除后,波形需要经过多个周期调整才能恢复正常。而PID控制在短时间内就可以将扰动的影响消除,并不会影响随后的输出波形,但输出波形品质较差。采用复合控制在移除负载时响应波形,从图中可看出在瞬态时PID控制可以在短时间内(与输出电压的周期相比,时间很短)将非周期扰动的影响消除,在稳态时重复控制可以保证输出高质量的正弦波形,使输出波形达到最优效果。
3 试验结果
根据以上分析,本文对数字PID控制、重复控制以及新型复合控制进行了一系列实验研究。系统参数如下:输入直流电压380V,输出额定功率2kVA电压115V,400Hz,开关频率25.6kHz,输出滤波电感0.8mH,输出滤波电容30μF,负载电阻7Ω。控制芯片采用高速信号处理器TMS320F240。实验波形如图4-图9,实验数据见表1所示。

图4 PID控制输出电压包络
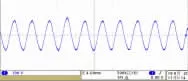
图5 PID控制突减负载瞬态电压波形

图6 重复控制输出电压包络
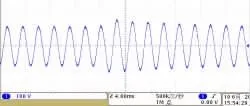
图7 重复控制突减负载瞬态电压波形

图8 新型复合控制输出电压包络
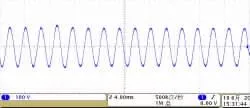
图9 新型复合控制突减负载瞬态电压波形
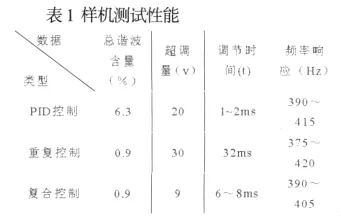
从实验结果可以看出,仅有PID控制时,系统输出电压畸变较大,总谐波畸变率超过5%,但系统负载突变时波动较小。只有重复控制时,系统稳态输出波形质量好,总谐波畸变率小于1%,但系统负载突变时输出电压波动大、调整时间长。采用新型复合控制方案后,系统同时得到了满意的稳态输出波形和动态效果。
4 结论
新型复合控制策略吸取了PID控制和重复控制的长处,克服了它们各自的不足,使系统得到了较为理想的稳态特性和动态特性。实验结果证明,该控制策略是一种实用的正弦波逆变电源控制方案,可广泛应用到各种逆变电源系统中。
[1]刁元均.基于DSP的逆变电源数字控制技术的研究.2007-西南交通大学:电力电子与电力传动.
