自适应模糊-PID控制在燃气锅炉系统中的应用
2011-03-06祁增慧河北建筑工程学院电气工程系河北张家口075024
祁增慧(河北建筑工程学院电气工程系,河北张家口 075024)
目前,国内的工业锅炉占据主流的仍然是燃煤锅炉,但是燃煤锅炉的污染严重,废渣、废气、废水“三废”俱全,治理亦较困难,燃料储存、输送不便,自动化程度低,温度调节慢。燃油锅炉的烟尘排放量虽然较低,但其排放的有害气体是造成“光化学烟雾”和酸雨的罪魁祸首,且运行成本高。而燃气锅炉具有占地面积少、排放污染少、调节迅速、易实现自动化、智能化控制。随着社会经济的发展和对节能、环保要求的提高,特别是对温度自动调节要求较高的场合(如生物制药、体育场馆、宾馆等的恒温调节),燃气锅炉与燃煤锅炉相比有着巨大的优势。提高燃气锅炉系统运行性能,根据用户需求及外界环境变化调整锅炉系统运行状态,将进一步节能减排,取得巨大的经济效益。
当前运行的燃气锅炉自动控制系统大多继承了经典PID(比例、积分、微分)控制算法。在工业过程控制中,PID控制器由于其原理清晰、整定简单、应用经验丰富,目前仍占统治地位。但是,PID控制一般只适用于小惯性、小滞后、且系统数学模型较精准的过程控制,而对于具有较大惯性和滞后的工业过程,特别是难以精确建模的非线性、时变系统,PID控制往往不能取得较满意的控制效果。模糊控制及自适应控制经过多年的发展,在工业上已经得到广泛应用,我课题组通过对燃气锅炉系统运行特性的分析研究,采用参数自适应模糊控制与PID控制相结合的控制方法取得了良好的控制效果。
1 控制对象特性分析与控制方案选择
传统的锅炉控制系统是将温度作为单一被控量,通过传感器对回水温度的检测,与给定温度比较产生偏差并对该偏差信号进行PID调节,形成恒值调节系统。PID调节器的三个参数通过理论及现场整定后一般不再调整。然而,燃气锅炉控制系统是一个典型的多输入多输出系统,温度变化受室外气温、太阳辐射、空气湿度、风速等因素的影响,水温变化与负荷变化及循环水量、流量有关,系统存在大惯性滞后、非线性、时变、难以精确建模等特点。对于一些控制过程较为复杂且对控制精度和稳定性要求较高的系统,单一的PID控制方法就难以满足要求了。并且常规PID调节器不具有在线整定参数的功能,不能满足在不同工况下系统对控制参数的自整定要求。而环境对过程的影响及过程本身特性的变化是必然的,甚至其中一些变化可能还是大范围的,一旦被控对象参数、结构发生变化,如用户负荷的增减等,将影响其控制效果,或达不到温控需求,或造成能源浪费。
模糊控制可模拟人脑的思维方式,能处理客观世界的非精确、非线性的信息,具有很强的抗干扰能力。在常规的模糊控制系统中,由于模糊控制器实现的简易性和快速性,往往采用二维控制器的形式。这类控制器都是以系统偏差和偏差变化率作为输入变量,因此具有类似常规比例-微分控制器的作用,可以获得良好的动态特性;但其可靠性差,并且当偏差和偏差变化率偏小时,传统的模糊控制方法失去作用,从而导致模糊控制规则失效[1-2]。
自适应控制所要解决的问题是,当被控对象参数发生大范围变化时,控制器如何自动地改变其自身参数,以使控制系统的性能维持不变,或具有更好的控制品质。
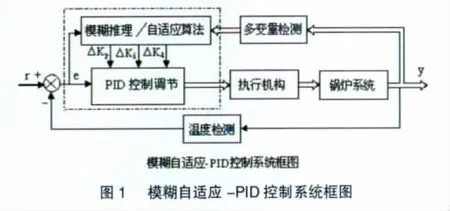
将模糊控制技术、自适应控制技术和PID控制技术结合起来,以偏差e和偏差变化率ec作为输入变量,可以满足不同时刻偏差e和偏差变化率ec对PID参数自整定的要求,结合对多项被控量的检测,利用模糊理论和自适应算法在线对PID参数进行校正,便构成自整定模糊-PID控制器。这无疑可弥补单一控制技术的不足,为现代工业自动控制问题提供新的解决方案。具体结合方法如图1所示。
2 模糊-自适应控制器的设计
通常,将模糊控制器输入变量的个数称为模糊控制器的维数。一般情况下,一维模糊控制器用于一阶被控对象,由于这种控制器输入变量只有一个误差,它的动态控制性能不佳,因此目前被广泛采用的均为二维模糊控制器,这种模糊控制器以误差和误差的变化率为输入量,以控制量的变化为输出变量。从理论上讲,模糊控制器的维数越高,控制就越精细。但是维数越高,模糊控制规则变得过于复杂,控制算法的实现就会相当困难。
本文设计一个双输入三输出的模糊控制器,选取系统偏差e和偏差变化率ec作为输入变量,输出量ΔKP、ΔKI和ΔKD,通过输出来实时的整定PID的KP、KI和KD三个参数。
2.1 输入/输出变量的量化
设定偏差e的基本论域为[-14,14]。偏差变化率ec的基本论域为[-25,25],而控制量ΔKP、ΔKI、ΔKD的变化范围根据实际锅炉系统的容量、负荷确定;给定输入变量的基本论域可以通过专家指导来确定,它在控制过程中往往是不变化的。偏差输入变量 E 和 EC 的模糊论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},输出量是 PID 参数ΔKP、ΔKI和ΔKD,它们的模糊论域均为{-3,-2,-1,0,1,2,3}。
一般说来,论域的量化等级越细,控制精度也越高。但过细的量化等级将使算法复杂化。在确定了变量的基本论域和模糊集论域后,比例因子也就确定了。若用Ke和Kec表示偏差和偏差变化的量化因子,KP、KI、KD表示控制量的比例因子,e由量化因子Ke=6/14=0.429量化为E;ec由量化因子Kec=6/25=0.24 量化为 EC;KP、KI、KD的比例因子亦可算出。
2.2 输入/输出变量的模糊化
模糊化过程主要包括两方面的工作。首先要建立输入/输出变量的模糊集,其次是对输入/输出变量选定隶属函数。
模糊子集均为{NB,NM,NS,ZO,PS,PM,PB},其中,NB表示负大,NM表示负中,NS表示负小,ZO表示零,PS表示正小,PM表示正中,PB表示正大。
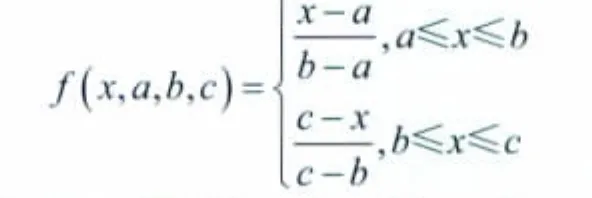
E、EC以及ΔKP、ΔKI和ΔKD的模糊隶属度函数均选择三角形隶属度函数。其隶属函数计算公式如下:
2.3 模糊控制器的控制规则的设计
模糊规则库是根据PID三个参数KP、KI、KD和输入偏差及偏差变化率之间的关系,结合工程设计人员的技术知识和实际操作经验设计而成的,称为IF-THEN规则,是模糊判决的依据。根据IF-THEN模糊推理规则,以E、EC为输入,ΔKP、ΔKI、ΔKD为输出,根据专家知识和有经验的操作人员的经验,总结出控制规则,可用模糊条件语句来描述。
2.4 模糊推理及模糊决策
系统采用Mamdani推理法,即先对两个推理前件的隶属度取小,作为推理后件隶属度在语言变量区域取截集,把对应于当前输入值的所有有效规则推理所得的控制量的模糊截集相“并”,然后根据重心法公式:

对输出模糊量进行模糊判决,求得控制量。
根据以上方法,经过总结和归纳得到控制规则,计算出所有的控制量变化值,并写成矩阵,从而得到模糊控制规则表。以上工作都是离线进行的,在求得控制表后,将其存放在计算机的内存中,并采用VB语言在上位机上编写一个相应的查找控制表的子程序,来实现PID参数模糊自整定控制算法。
2.5 自适应控制方式的选择
自适应控制主要有增益自调度型、模型参考自适应型和自校正控制型等几种形式,考虑到模型参考自适应型和自校正控制型要求被控对象数学模型清晰,本系统难以实现;锅炉系统的因数变化规律可以事先把握,则依据这些经验知识设计的控制系统,对这个变化因素的适应能力可以做得更好,而且设计方法简单,也并不需要更多的新的理论来支持,故选择增益自调度型自适应控制。
3 结束语
本文以燃气锅炉系统为控制对象,介绍了自适应/模糊控制器的设计与实现方法。从仿真结果可看出自适应模糊控制器能适应对象参数、结构的变化,对象改变后,系统稳定性能较好。可见自适应模糊控制仍具有强的鲁棒性,有更好的控制性能。采用自适应模糊算法结合PID控制,对锅炉燃烧这一具有明显大惯性和非线性特性,被控量时变性大、影响因素多的系统进行控制,取得了较好的控制效果。
[1] 王振臣.Lon Works总线与模糊PID控制在空调系统中的应用[J].工业控制计算机,2007,20(11):20-21.
[2] 邱黎辉.模糊PID控制在中央空调系统中的应用研究[J].计算机测量与控制,2004,12(1):57-59.
