世界最大的航天工程——“国际空间站”于5月竣工
2011-03-06士元
□□经过10多年的建造,世界上投入资金最大、参与国家最多、建造周期最长、技术水平最高、应用范围最广的“国际空间站”(ISS),于2011年5月装上了最后两台设备——阿尔法磁谱仪-2(AMS-2)和快速后勤搬运器-3(ELS-3),它标志着这座“空间大厦”正式建成。“国际空间站”包含13个增压舱,其中8个用于科学实验和航天员居住,1个为空间站提供初始推进、姿控、通信和储存,4个用于对接。另外,还装有7段桁架结构、4对巨型太阳电池阵、1个移动服务系统和多台舱外仪器设备等。
1 国际合作的产物
“国际空间站”是由美国、俄罗斯、11个欧洲航天局成员国(法国、德国、意大利、英国、比利时、丹麦、荷兰、挪威、西班牙、瑞典、瑞士)、日本、加拿大和巴西共16个国家联合建造的。
在筹建该空间站的过程中,美国最初称其为“阿尔发”,即希腊第1个字母“α”,意为世界第1座大型空间站,但俄罗斯不同意,认为俄罗斯的和平号才是世界第1座大型空间站,所以“国际空间站”至今也没有正式名称。
该空间站由众多国家合作打造,其中美俄是“主力军”,具体分工如下:
●美国研制实验舱、节点舱和气闸舱等各1个,以及7段桁架结构、4对太阳电池阵;
●俄罗斯研制多功能货舱、服务舱、对接舱等各1个和研究舱2个;
●欧洲研制实验舱、观测舱和机械臂各1个,节点舱2个,自动转移飞行器(ATV)多个;
●意大利研制多用途后勤舱3个;
●日本研制实验舱1个和“H-2转移飞行器”(HTV)多个;
●加拿大研制移动服务系统1个,该系统包括遥控机械臂——加拿大机械臂-2(Canadarm 2)、移动基座系统(MBS)、“德克斯特”专用灵巧机械手(Dextre Special Purpose Dexterous Manipulator——SPDM);
●巴西提供一些实验用快速托架。

值得注意的是,我国多家单位参与了“国际空间站”中阿尔法磁谱仪-2的研制。执行STS-134任务的奋进号航天飞机于2011年5月16日将阿尔法磁谱仪-2送往“国际空间站”。其质量达6.8t,寿命10年,将首次对宇宙空间的带电粒子进行直接观测,区分形形色色的粒子,探测宇宙中的奇异物质,包括暗物质及反物质。
上述舱体和其他设备都是由航天飞机或一次性运载火箭分多次运往“国际空间站”的,然后由站上的遥控机械臂系统和航天员舱外活动进行组装,逐步建成了这座规模庞大、用途广泛的空间站。
2 性能优异的构型
“国际空间站”原定采用桁架挂舱式构型,即以长达几十米或上百米的组装式或展开式桁架为基础结构,然后将多个舱段和设备安装在桁架上。由于这种空间站能运行20年以上,所以也叫永久性空间站。
这种空间站的优点是:灵活性更强,可根据实际需要组成各种不同的形状;安装在桁架上的各个舱段、设备、太阳电池阵的拆卸、修理和更换都很方
便;采用集中式供电和统一的指挥与控制系统,能大大提高空间站的工作效率;其结构不像舱段式空间站那样紧凑,桁架间的宽阔空间使多种观测仪器的安装和太阳电池阵的增设变得容易得多。其缺点是:规模大、费用高、技术复杂,尤其是需要航天员多次出舱完成组装工作,因此有一定风险。目前的“国际空间站”实质上是一个集积木式和桁架挂舱式构型于一体的“混血儿”,为的是充分利用成熟技术,减少建造难度、费用和风险。

“国际空间站”参与国会议
从总体上看,“国际空间站”由两大部分立体交叉组合而成:一部分是以俄制多功能货舱为基础,通过对接舱段及节点舱,与俄罗斯服务舱、研究舱,以及美国、欧洲和日本的实验舱对接,形成空间站的核心部分;另一部分是服务部分,即在美国的桁架结构上,安装加拿大的移动服务系统、舱外仪器设备和4对大型太阳电池阵。这两大部分垂直交叉,从而可加强空间站的刚度,且有利于各分系统和科研设备工作性能的正常发挥,航天员出舱装配与维修也很方便,并使空间站的微重力环境与控制精度达到最佳。
“国际空间站”的特点是性能高、容积大、载人多、寿命长、用途广,可用作观测站、实验室、试验台等,还能促进商业、教育以及公共宣传等活动的开展。
3 美国的主要贡献
美国是“国际空间站”工程中的“老大”,其投资占整个工程费用的65%以上,包括用航天飞机为“国际空间站”送去大量部件。
在“国际空间站”的6个实验舱中,价值14亿美元的美国命运号实验舱(USL Destiny)率先于2001年2月7日由阿特兰蒂斯号航天飞机送上太空。该舱增压容积为106m3,用于微重力科学实验与研究。它也是指挥与控制“国际空间站”装配和正常运行的核心舱,控制站内外通信、电源分配、热控以及数据采集和分发。
1998年12月4日上天的团结号节点舱-1(Unity Node 1)是一种小型圆柱形增压舱,有2个轴向对接口和4个径向对接口。它同时与俄罗斯曙光号功能货舱(Zarya Control Module或FGB)、美国命运号实验舱对接。每次航天飞机所携带的多用途后勤舱也与它对接。团结号节点舱-1还与美国探索号气闸舱(Quest Joint Airlock Module)对接。
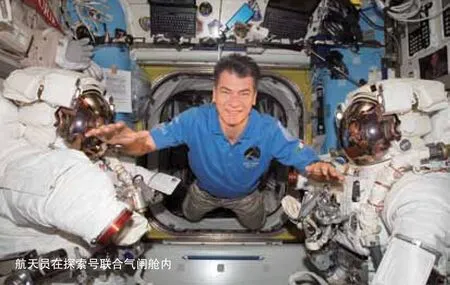
美国研制的世界最大气闸舱——探索号于2001年7月13日对接在团结号节点舱-1上。该舱由较小的乘员舱和较大的设备舱两部分组成,穿美国或俄罗斯舱外航天服的航天员都能从这里出舱。
美国研制的桁架是空间站的基础结构,所有设备都直接或间接安装在桁架上。桁架采用六角形截面,单边长度为3m。整个桁架有7段,每段长度不超过航天飞机货舱的最大允许长度(13.7m),横截面直径不大于4.5m,质量不超过17t。
美国负责提供的4对可灵活展开的硅光电太阳电池阵是经多次发射安装到空间站上的。每对太阳电池阵的翼展为73.2m,整个太阳电池阵总面积达2419m2,可产生76kW的功率。太阳电池阵挂在桁架上,随时对日定向。每个太阳电池阵配备6个镍氢蓄电池,每个电池容量为81Ah,用于空间站在阴影区的供电。
另外,美国为“国际空间站”研制了5个新型“快速后勤搬运器”(ELC),它们能为“国际空间站”提供一个在空间真空环境下试验的平台和设施,还可用于“国际空间站”备用硬件的存放,以便在航天飞机退役后仍能满足空间站建设的硬件需求。
2010年1月22日,“国际空间站”上的航天员用一种经过升级的软件,通过“终极无线链接”系统无线进入国际互联网。该系统能为航天员提供直接的私人通信,以提高他们的生活质量,帮助他们消除在封闭生活环境中的孤独感。

“国际空间站”桁架与太阳电池翼

机器人航天员-2可以举起杠铃
2011年2月25日,执行STS-133任务的美国发现号航天飞机为“国际空间站”送去了1个常驻人员——类人型机器人,这个名为机器人航天员-2(Robonaut-2)的类人型机器人质量为136kg。它不仅外形像人,而且可以像人一样工作,最大的用处是可在未来成为航天员出舱活动的助手或替身,或帮助完成对人类而言过于困难或危险的任务。不过,这次上天的机器人航天员-2在进入空间站后,其活动范围目前只局限在命运号实验舱内。随着技术进步,今后它在空间站内外活动的自由度可能增加。未来该机器人将主要完成舱外任务。
4 俄罗斯的主要贡献
俄罗斯在空间站建造方面有丰富的经验和先进的技术。1993年,俄罗斯正式加入“国际空间站”项目,使该站采用了俄罗斯在空间站方面的很多成熟技术,从而节省了费用,少走了弯路,降低了风险,缩短了时间。
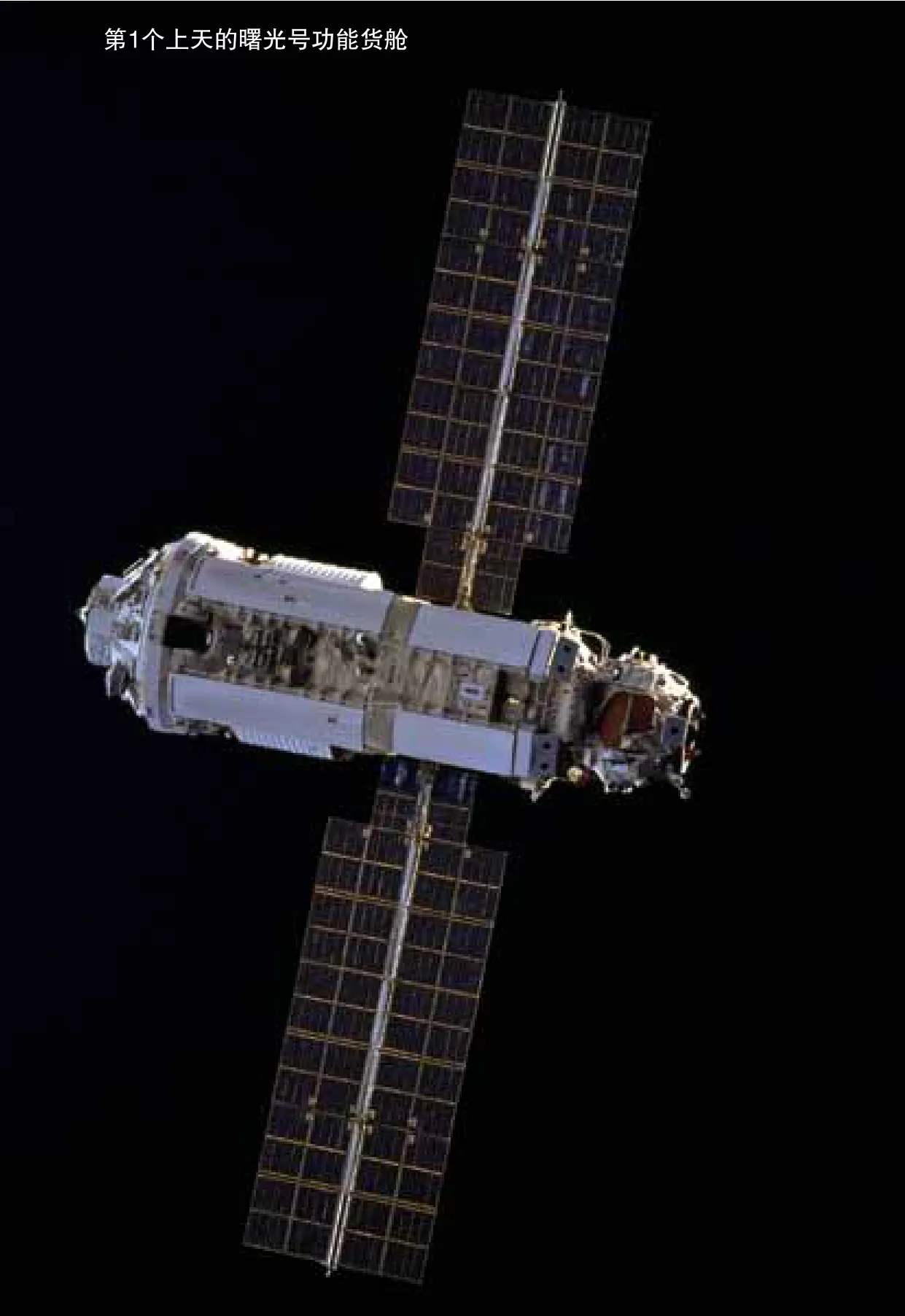
由美国出钱、俄罗斯研制的曙光号功能货舱是“国际空间站”第1个上天的舱段,1998年11月20日发射。它具有推进、导航、通信、供电、居住和推进剂储存等功能,用于提供推进控制、燃料储存和组装初期的供电能力及与服务舱的交会对接能力。该舱有4个对接口,其发射标志着“国际空间站”组装阶段的开始。
2000年7月12日,俄罗斯用质子号火箭发射了星辰号服务舱(Zvezda Service Module)。它是空间站初期组装阶段的指挥与控制中心 (美国命运号实验舱发射后,指挥与控制中心转移到美国命运号实验舱)。该舱由充压的过渡舱、生活舱、工作舱这3个密封舱以及不充压的推进服务舱组成。其球形过渡舱用作对接(有4个对接口)或出舱,生活舱和工作舱中设有供航天员洗澡和睡眠的单独“房间”,舱内有带冰箱的厨房、餐桌、睡袋、卫生间和运动器械等生命保障设施,可容纳3名航天员居住。

组装星辰号服务舱
2001年9月14日上天的俄罗斯码头号对接舱(Mooring Compartment Module或Pirs docking module)有6个对接口,具有对接和储存两个功能,还可供航天员出舱活动使用。
俄罗斯为“国际空间站”研制的探索号迷你研究舱-2(Search MRM-2)、黎明号迷你研究舱-1(Rassvet MRM-1)分别于2009年11月10日、2010年5月14日发射。它们可用于对接飞船和供航天员出舱,但主要用途是进行科学实验,增加空间站内俄方科学实验的数量。俄罗斯还拟于2012年发射多功能实验舱(MLM),并计划研制两个新舱段,以用于完成被取消的科学动力供应平台的任务。


5 欧洲的主要贡献
欧洲对“国际空间站”的主要贡献是提供哥伦布号实验舱(Columbus laboratory Module)和自动转移飞行器,另外还有和谐号节点舱-2(Harmony Node 2)、宁静号节点舱-3(Tranquility Node-3)、瞭望号(Cupola)观测舱、“欧洲机械臂” (ERA)和莱昂纳多号多用途后勤舱(Leonardo Multi-Purpose Logistics Module——LMPLM)等。
2007年10月23日发射的和谐号节点舱-2用于对接后续送上空间站的哥伦布号实验舱和希望号日本实验舱(JEM)。2008年2月7日上天的欧洲哥伦布号实验舱是一个多用途增压实验室,用于开展航天医学、生物技术、新材料和基础物理方面的研究。2010年2月8日发射的宁静号节点舱-3是瞭望号观测舱与“国际空间站”的连接点,并装有先进的生命保障系统,能制造氧气,回收废水,也携带了废物处理系统和洗手间。

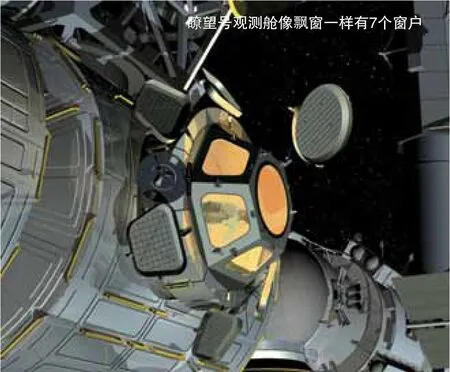
2010年2月8日发射的瞭望号观测舱呈圆顶屋形状,设有6个周边窗及1个天窗,能保证航天员在对外侧观测时有360°的视野。航天员从这里不仅能看到地球的美丽景象,而且可以方便地观察空间站外的情况,对在空间站舱内指挥航天员太空行走和使用机械臂安装设备都有很大帮助,还能用来执行对地观测及空间科学任务。
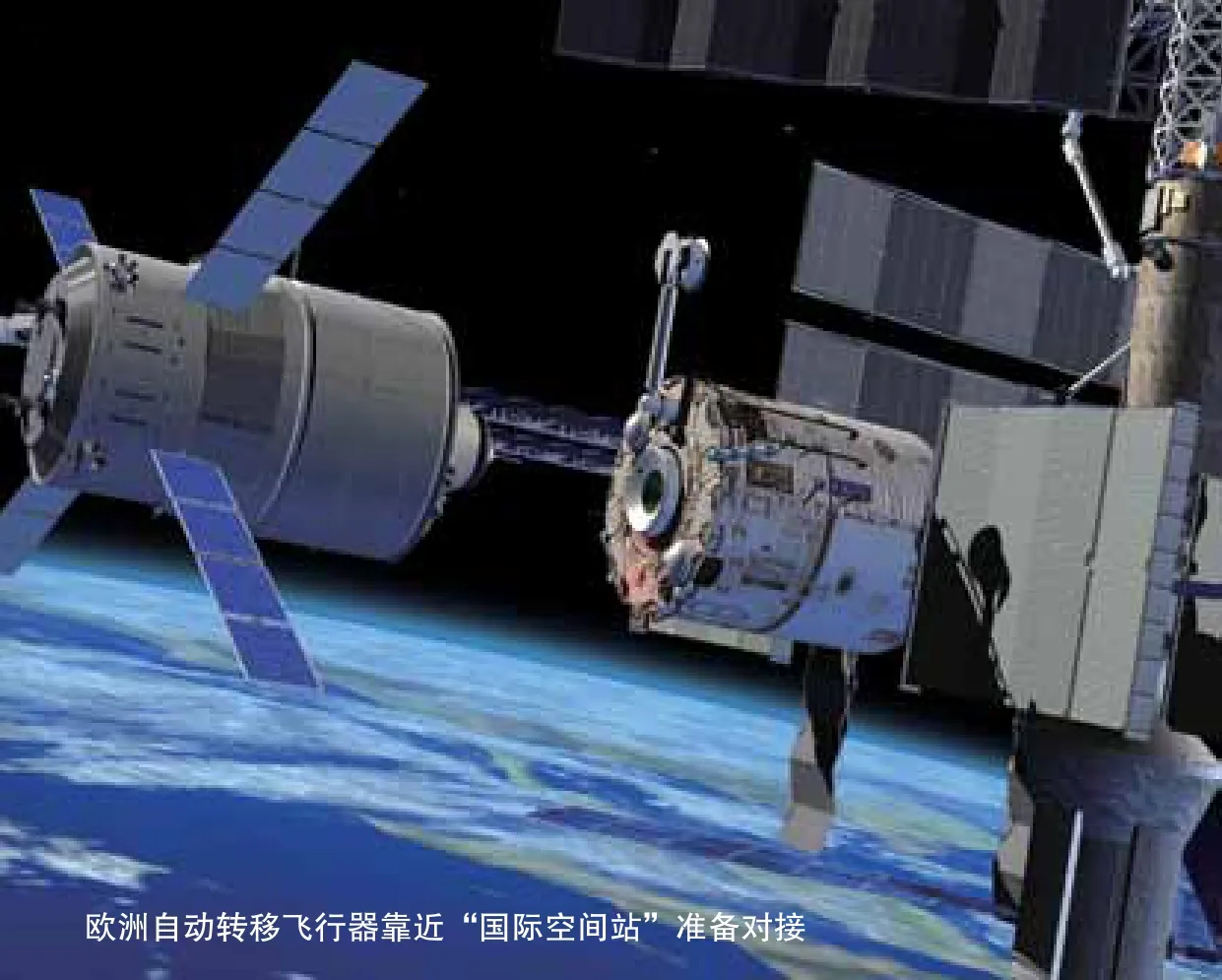
2008年3月9日上天的首艘自动转移飞行器凡尔纳号(Verne)是大型无人货运飞船,可向“国际空间站”运送8t的货物。第2艘自动转移飞行器开普勒号(Kepler)也于2011年2月18日发射,它为“国际空间站”运送补给物资。
“欧洲机械臂”于2010年5月14日送往“国际空间站”,该机械臂伸展开时总长为11m,能够搬运最重达8t的部件。另外,其上还装有摄像机,可准确地将执行太空行走任务的航天员送往指定区域,并能对空间站的外表面进行监测。
意大利为“国际空间站”研制了3个莱昂纳多号多用途后勤舱。这些后勤舱相当于集装箱,主要用于空间站的后勤运输服务,向空间站运送实验设备、后勤供给品和实验材料等。最近,美国与意大利改装了该舱,去除莱昂纳多号多用途后勤舱中不必要的部分,并加强该舱的空间防护能力,目的是永久安装在“国际空间站”上。改装后的莱昂纳多号已于2011年2月27日发射到“国际空间站”上进行固定安装,并更名为“永久性多功能舱”(DMM)。

装在航天飞机货舱内的莱昂纳多号多用途后勤舱的功能相当于1个集装箱
2009年12月15日,欧洲航天局宣布准备向“国际空间站”发射1个 “空间冷却原子钟”。它在3亿年的时间里才会出现1s的误差,主要有3个作用:其一是检验爱因斯坦的“相对论”理论;其二,确保时标的准确性和长期稳定;其三,为测地学研究和遥感技术提供支持。“空间冷却原子钟”预计于2013年下半年发射升空。
另外,欧洲航天局为空间站航天员设计了头戴式计算机——“头戴式增强现实”(WEAR)仪,旨在帮助航天员简化生活。
6 日本的主要贡献
日本对“国际空间站” 的主要贡献是提供希望号日本实验舱和“H-2转移飞行器” 。
在2008-2009年用航天飞机分3次发射上天的希望号日本实验舱是“国际空间站”最庞大、最复杂的舱段,使用铝合金制作而成,呈圆桶形,全长11.2m,外径4.4m,内径4.2m,质量152t,耗资380亿日元。它由增压舱(PM)、遥控机械臂(RMS)、暴露设施(EF)、实验后勤舱(ELM)4部分组成,其中实验后勤舱又包括实验后勤舱-增压段(ELM-PS)和实验后勤舱-暴露段(ELM-ES)两部分。增压舱以研究微重力下的医药、生物、材料加工、蛋白质晶体生长和流体动力学为主。遥控机械臂用于把实验设备和有效载荷移进或移出增压舱,以及在暴露设施上移动和定位有效载荷。暴露设施用于为科学家提供一个暴露在空间环境中的研究平台,可进行科学观测、对地观测、通信以及需要在暴露环境下进行的航天技术研究。实验后勤舱-增压段用于为增压舱运输和储存各种物品,还可作为增压舱的附加实验室或安全救生容器。实验后勤舱-暴露段可容纳3个有效载荷,用于为暴露设施储备和提供物资。它可供4名航天员进行新材料和生物技术等各种科学技术实验研究活动。不过,由于希望号日本实验舱太大,日本用不了,所以打算出租一部分舱段的空间。

打造实验后勤舱-增压段

据韩国《朝鲜日报》2011年1月18日报道,日本决定将希望号日本实验舱免费向韩国等亚洲国家开放。日本计划2013年将韩国的实验器材送往希望号日本实验舱,韩日两国将共同利用该器材。
2009年9月11日,日本用H-2B火箭发射了第1艘“H-2转移飞行器”。该货运飞船1次能搭载6t的水、食品和实验设备等物资。由于它与空间站的接口较宽,所以可以运送其他货运飞船无法运送的大型装置。日本第2艘“H-2转移飞行器”名为“白鹤”(寓意幸福和快乐),它于2011年1月22日发射, 向“国际空间站”送去了食物、生活用品、80kg饮用水,以及马来西亚、印尼、泰国和越南等提供的辣椒、番茄等植物种子(进行品种改良实验),物资总质量约为5.3t。
7 加拿大的主要贡献
研制太空机械臂是加拿大的拿手好戏,航天飞机上的机械臂就是加拿大研制的,“国际空间站”上的机械臂也不例外。
加拿大为“国际空间站”提供了1个移动服务系统及有关地面设备。该移动服务系统包括世界最大的太空机械臂——加拿大机械臂-2(2001年4月19日发射)、移动基座系统(2002年6月5日发射)和“德克斯特”专用灵巧机械手(2008年3月11日发射),大大减轻了航天员的舱外工作负担。加拿大机械臂-2比航天飞机上的机械臂更长,也更结实、更灵活、更多才多艺。移动基座是巨型遥控机械臂的工作平台。“德克斯特”是一个双臂机器手,有时会安装到加拿大机械臂-2的末端,有时也能自行“骑”到空间站机械臂的轨道上滑动独立完成操作任务,已承担了不少原来由航天员出舱完成的维修和装配任务。


8 结语
“国际空间站”的建造分准备、初装、完成3个阶段,每一个阶段都建立在前一个阶段的基础之上,但后一阶段又都比前一阶段有所突破、有所创新。“国际空间站”成员国现已同意将“国际空间站”的退役时间从2015年推迟到2020年以后,并拟邀请中国等参加。由于“国际空间站”已经建成,开始进入全面应用阶段,所以如何提高“国际空间站”的应用效率,让它发挥最佳的作用是今后要考虑的首要问题。■
