汽车ABS 逻辑门限值控制方法研究
2011-02-23郑太雄马付雷
郑太雄,马付雷
(重庆邮电大学汽车电子与嵌入式系统研究所,重庆 400065)
0 引言
汽车防抱死制动系统(anti-lock braking system,ABS)是制动时防止车轮抱死,提高附着系数利用率,以期获得最有效的制动效能和操纵稳定性,从而尽可能地避免交通事故发生的机电一体化产品[1]。我国汽车ABS行业起步较晚,有比较广阔的发展前景和空间。目前国内有30多家企业从事汽车ABS的研发和生产,其中有一定配套规模的企业不足10家,外资品牌主导着我国汽车ABS市场的配套与生产,因此自主研发ABS势在必行。
目前国内外ABS使用的控制方法有逻辑门限值法和基于古典及现代控制理论提出的一些新的控制方法,如PID(proportion integration differentiation)控制、滑动模态变结构控制、模糊控制等,但是一般采用单一方式来控制,所以很难兼顾鲁棒性、精度和稳定性[2-3]。因此,ABS产品采用现代控制方法的时机还不成熟,目前国内外应用最广泛的是逻辑门限值控制方法[4]。这种控制方法的特点是不需要建立具体系统的数学模型,并且对系统的非线性控制很有效。将这种控制方法用于ABS中时,仅需要利用汽车在制动过程中车轮角加、减速度和滑移率门限值控制就可以实现基本的防抱死制动循环,因此,本文主要针对逻辑门限值的控制方法进行研究。
1 逻辑门限值法控制原理
以汽车中某一个轮子为研究对象,忽略空气阻力,采用单轮车辆系统模型,如图1所示,车辆和车轮的运动方程以及纵向摩擦力方程为
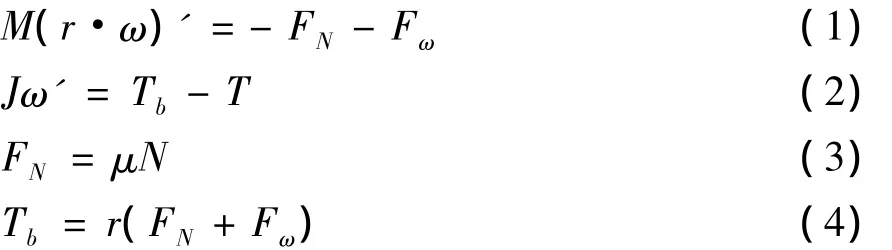
(1)-(4)式中:M为车辆质量;r为车轮半径;ω为车轮角速度;r·ω为车轮线速度(以下简称轮速);FN为车轮摩擦力;Fω为车轮滚动阻力;J为车轮转动惯量;Tb纵向制动阻力矩;T为制动力矩;μ为路面附着系数;N为车轮与地面法向反力。

图1 单轮模型Fig.1 Model of single wheel
(1)-(4)式表明,当制动阻力矩Tb小于制动力矩T的时候,Jω'小于0,即车轮处于减速状态;当制动阻力矩Tb大于制动力矩T的时候,车轮将会产生一个正向的加速度,依照这个规律设置2个合适的车轮角加、减速度门限即可基本实现对制动压力的调节,从而防止车轮的抱死。另外单独以车轮角加、减速度门限有很大的局限性,在初始和高速紧急制动情况下,有可能使防抱控制逻辑在后继的控制中失效。对于非驱动轮,也可能产生过早抱死而使防抱控制逻辑失效[5]。
另外,滑移率可以直接反映车轮和地面之间的滑移现象,国内外一些文献提到在汽车制动过程中把滑移率控制在10% ~30%时,能达到最佳的制动效果。因此,逻辑门限值法需要将车轮角加、减速度门限和滑移率这2个门限结合起来,以识别不同路况进行自适应地控制。
2 关键量处理
汽车制动过程中,车速和车轮线速度之间存在着速度差,也就是车轮与地面之间有滑移现象,滑移

(5)式中:S为滑移率;v为参考车速。
运用逻辑门限值法控制的2个关键参数是车轮角加、减速度及滑移率,其中车轮角加、减速度是通过轮速的一阶差商计算得出的,滑移率是由参考车速和轮速通过(5)式计算得来,而参考车速又是根据轮速估算得来,因此轮速信号是控制中的关键量,其被处理的好坏、准确与否将直接影响到控制的效果。
由于轮速信号受轮齿加工误差、电磁干扰等影响,波动很大,有可能触发车轮角加、减速度门限值,造成ABS的误动作,因此,需要对采集的轮速信号进行平滑滤波处理,轮速平滑处理一般采用的是数字滤波技术。关于轮速的数字滤波技术的研究,常用的是滤波增益为常数的指数平滑数据滤波技术,此外还有关于复杂滤波技术如卡尔曼滤波在轮速信号处理方面应用的研究[7-8]。由于ABS对轮速处理实时性的要求以及单片机的处理能力,滤波器的结构一般不能太复杂,运算量不能太大,因此,本文主要对一阶惯性滤波法进行研究。
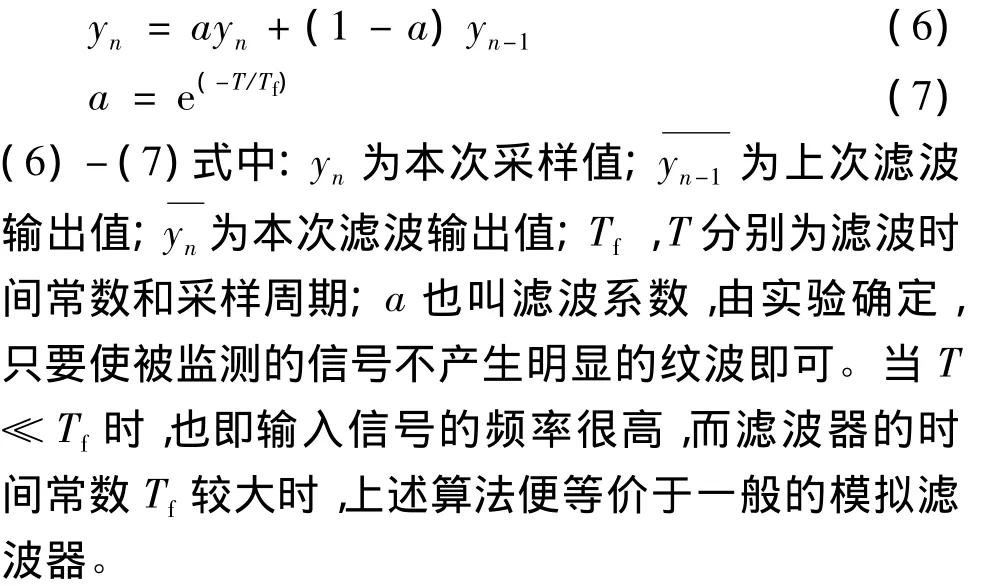
2.1 一阶惯性滤波法原理
一阶惯性滤波,又叫一阶低通滤波。是通过软件编程实现普通硬件RC低通滤波器的功能。一阶惯性滤波算法用公式表示为的程度用滑移率来表示为[6]
2.2 一阶滤波系数自适应法
一阶滤波无法完美地兼顾灵敏度和平稳度,需要寻找一个平衡。在可接受的灵敏度范围内取得尽可能好的平稳度,这就需要根据数据变化情况不断调节滤波系数,本文在对一阶惯性滤波法的缺点进行改进后,提出一阶滤波系数自适应法。
一阶滤波算法改进目标有以下两方面。
1 )当数据快速变化时,滤波结果能及时跟进(灵敏度优先);并且数据变化越快,灵敏度应越高。
2)当数据趋于稳定,并在一个固定的点上下振荡时,滤波结果能趋于平稳(平稳度优先)。
下面给出一阶滤波系数自适应法的具体步骤。
步骤1 在进行调整之前,先做如下判断。
a.数据变化是否朝向同一个方向(比如,当连续2次的采样值都比其上次滤波结果大,视为变化方向一致,否则视为不一致);
b.数据变化是否较快(主要是判断采样值和上次滤波结果之间的差值)。
步骤2 做出判断后,再做如下调整。
a.当2次数据变化方向不一致时,说明有抖动,将滤波系数清零,忽略本次新的采样值;
b.当数据持续向一个方向变化时,逐渐提高滤波系数,为本次新采样值的权;
c.当数据变化较快时,加速提高滤波系数。
针对一阶滤波系数调整方法进行程序设计,流程图如图2所示。
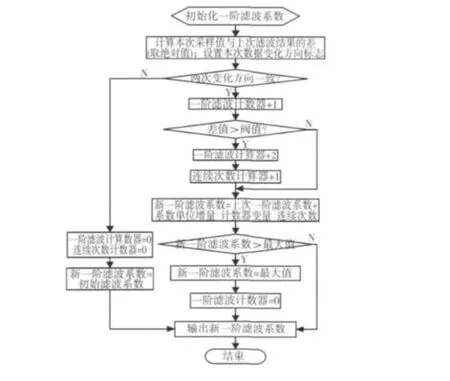
图2 一阶滤波系数调整方法流程图Fig.2 Flow chart based on themethod of the coefficient adaptive firs-order inertial filter smoothing
一阶滤波系数调整方法的关键在于以下3方面。
1 )初始滤波系数的确定。初始滤波系数的适当选取使得在轮速信号趋于稳定时能较好地进行曲线拟合,便于得到平滑的轮速曲线,一般根据一阶滤波方法不断更改滤波系数进行实验,对比得出。
2 )差值的阀值。本次采样值与上次滤波结果的差值的阀值的设定影响滤波的灵敏度,决定滤波曲线能否跟进轮速特征点的变化。根据汽车制动过程中的干扰信号特点进行数据统计后设定,一般小于轮速特征点的速度变化幅值。
3 )系数单位增量。系数单位增量为一阶滤波计数器加1时的滤波系数增加量,其值的设定也在一定程度上影响滤波的灵敏度,决定了滤波曲线跟进特征变化的速度大小。
3 控制策略
3.1 单轮控制策略
根据制动压力、轮速和地面附着力的关系,以单个车轮为研究对象,可将每个控制循环大致分为增压、减压和保压3种状态。鉴于首次循环的特殊性,增压状态又分为首次增压和阶梯增压。门限值参数的设置是在实车路试过程中总结得来的经验值。各种状态下控制策略流程图如图3所示。图3中,S表示当前时刻的滑移率值;A表示当前时刻的轮加速度值;S1,S2,S3和 A1,A2,A3分别表示不同控制阶段车轮加速度和滑移率的门限值,各参数说明见表1。

图3 各种状态下控制策略流程Fig.3 Flow chart of control strategy based on each state

表1 控制参数说明Tab.1 Introduction of control parameters
在ABS控制中首次循环应让防抱死充分的发挥,要求有较大的速度差,但又不能有过强的制动,太强及太弱的防抱死循环都给后续的防抱死循环带来不利,所以首次增压状态要有较大的滑移率门限值和较小的减速度门限值[9]。一般首次进入减压的滑移率门限S1要比后面循环的S3大5% ~10%。
减压状态使轮速回升,轮加速度门限值A2一般在1~3 m/s2。如果设置的门限值太小,车轮还没有充分恢复就进入保压状态,这样会产生抱死趋势[9]。如果设置的门限太大,车轮可能无法达到这一门限值,在这种情况下就有可能出现失控,导致车轮一直处以恢复状态,制动时间和距离就会变长。
保压状态一方面可以使轮速不过度恢复,保持一定的制动状态,直到滑移率门限小于S2进入阶梯增压状态;另一方面,在保压状态中如果轮加速度小于A3,说明此时轮速回升不够,继续保压或增压可能会使车轮抱死,应再次进入减压状态,使轮速适当的回升。门限值A3在减压状态之后,与A2的值相比不能太大,原则上不应超过3m/s2,太大会造成减压过多导致制动距离变长。
阶梯增压状态与前面首次增压状态相比,增压速率较为缓慢,在不抱死的情况下,使轮速充分下降。
3.2 前轮同步控制
车辆的每个车轮采用上述控制策略分别进行控制,在实车路试过程中,车辆出现跑偏现象,制动过程中方向稳定性主要和前轮有关,跑偏的原因是2个前轮在制动过程中制动压力差造成的,因此,在控制中2个前轮应该采用同步控制,尽可能的减小制动过程中的压力差。前轮同步控制流程如图4所示。图4中,用0轮和1轮表示2个前轮,并以1轮先满足减压门限为例,图4中压力状态和门限值参照图3。
由图4知,前轮同步控制的规则应该满足:1)当一个前轮进入减压状态时,另一个前轮应处于保压或减压状态,具体状态由判断相应的门限值后得出,这样可避免由一个前轮减压而造成的压力与另一个前轮相差很大;2)2个前轮增压状态应该保持同步,避免压力建立过程中不同步造成的压力差。
4 道路试验及分析
针对某款汽车开发了ABS ECU,运用本文中基于逻辑门限值法的控制策略,前轮采用同步控制,后轮采用单独控制,轮速滤波方法采用一阶滤波系数自适应法,分别在高附着系数和低附着系数路面下进行了实车道路试验,制动过程中轮速曲线如图5,6所示,由于篇幅限制只给出左前轮和右后轮的轮速变化曲线。

图5和图6分别是车辆在50 km/h和35 km/h的初速度时高、低附着系数路面下的制动曲线。由图5,6可知,车轮在制动过程中轮速变化趋势较好,没有发生抱死现象。高附着下制动时间为2 s,制动距离为14 m,平均减速度为6.9 m/s2;低附着下制动时间为5.3 s,制动距离为25 m,平均减速度为1.8 m/s2。经过一阶滤波系数自适应法滤波后的轮速信号较为光滑,车轮角加、减速度波动较小,能满足实时控制的要求。另外汽车在制动过程中也未出现跑偏和甩尾现象,验证了本文所采用前轮同步控制策略的有效性。
5 结束语
本文采用的逻辑门限值控制法是一种比较成熟的ABS控制方法,所设计的控制策略及轮速滤波方法在高、低附着系数路面下取得较理想的控制效果,另外优化现有的控制策略、提高路面识别的准确性是ABS系统达到最佳控制效果以及适应多种路面条件的前提,今后需要进一步研究。
[1]李建勋,张春化.速度分段在ABS逻辑门限值控制法中的研究与应用[J].汽车技术,2004(11):5-8.
LI Jian-xun,ZHANG Chun-hua.Study on Application of Speed Segmentation in the ABS Logic Threshold Control Method[J].Automobile Technology,2004(11):5-8.
[2]李锐,郑太雄,李银国,等.汽车防抱死制动系统分级智能控制[J].机械工程学报,2007,43(8):135-141.
LIRui,ZHENG Tai-xiong,LI Yin-guo,et al.Hierarchical Interlligent Control of AutoMobile Anti-Lock Braking System[J].Chinese Journal of Mechanical Engineering,2007,43(8):135-141.
[3]蔡燕,黄智宇.基于NCV1124的ABS轮速信号采集处理系统的设计与实现[J].重庆理工大学学报:自然科学版,2009,23(8):6-9.
CAI Yan,HUANG Zhi-yu.Design and Implementation of ABSWheel Speed Signal Acquisition and Processing System on NCV1124[J].Journal of Chongqing Institute of Technology:Natural Science,2009,23(8):6-9.
[4]孙晓丹.基于XC164CS的汽车防抱死控制器软件设计[D].哈尔滨:哈尔滨理工大学,2007.
SUN Xiao-dan.Software Design of Anti-lock Controler Based on XC164cs[D].Harbin:Harbin University of Science And Technology,2007.
[5]罗朝辉,韩文涛.汽车防抱死制动系统的控制方法研究[J].武警工程学院学报,2003,19(2):24-27.
LUO Chao-hui,HANWen-tao.Study on the Algorithem of Anti-Lock Braking System [J].Journal of Engineering College of Armed Police Force,2003,19(2):24-27.
[6][日]ABS株式会社,李朝禄.汽车制动防抱装置(ABS)构造与原理[M].北京:机械工业出版社,1995:27-28.
[Japan]ABS Limited Company,LI Chao-lu,et al.Structure and Principle of Anti-Lock Braking System[M].Beijing:China Machine Press,1995:27-28.
[7]LIU Guofu,ZHANG Qi,WANG Yueke,et al.Analysis of the ABSWheel Speed Signal Error and Method of E-qual Period Sampling[C]//2006 IEEE International Conference on Information Acquisition,Aug 20-23,2006.Weihai China:IEEE press,2006:994-999.
[8]HERNANDEZW.Improving the response ofwheel speed sensors by using robust and optimal signal processing techniques[C]//Proceedings of the IEEE International Symposium on Industrial Electronics,June 20-23,2005.Dubrovnik,Croatia:IEEE press,2005:1049-1053.
[9]程军.汽车防抱死制动系统的理论与实践[M].北京:北京理工大学出版社,1999:80-86.
CHENG Jun.Theory and Practice of Automotive Anti-Lock Braking System[M].Beijing:Beijing Institude of Technology Press,1999:80-86.
(编辑:魏琴芳)
