车辆制动稳定性的模糊协调控制
2011-02-23马红星郑太雄马付雷李炯球
李 锐,马红星,郑太雄,马付雷,李炯球
(1.重庆邮电大学自动化学院,重庆 400065;2.重庆邮电大学汽车电子与嵌入式系统工程研究所,重庆 400065)
0 引言
车辆在制动过程中,四轮地面受力情况对车身方向稳定性和操纵性有决定性影响[1],特别是在高速行驶过程中进行紧急制动时,地面受力的不平衡会使方向盘转向过度,严重的将导致车辆偏离原来行驶方向(甚至闯入对方轨道),以至引发交通事故。目前,提高汽车紧急制动稳定性的办法包括转向角校正方法[2-3]和扭转力分配方法[4]。转向角校正方法是分别对前轮和后轮施加一个修正转向角来校正横摆运动;扭转力分配方法是通过级差控制和四轮驱动技术以使车身稳定。但是,转向角校正方法和扭转力分配方法都需要添加传感器和硬件设备,这样不但导致了系统的复杂性而且增加了系统成本。制动稳定性是由作用于各轮胎上的力对车辆质心力矩来决定的,所以,制动稳定性问题可由车辆的横摆力矩来描述[1]。因此,有必要从轮胎与地面接触的力学特性分析着手,找出横摆力矩与制动力之间的相互关系,再通过施加合适的控制策略来提高车辆制动的稳定性问题。
1 车辆制动模型
1.1 车轮制动模型
忽略空气阻力和车轮滚动阻力,主要对车辆直线运动过程进行分析,控制模型采用单轮车辆模型如图1所示,可以不失研究的一般性。

图1 单轮车辆模型Fig.1 Single wheel vehiclemodel
车辆运动方程、车轮运动方程和车轮纵向摩擦力的表达式如(1)-(3)式所示

(1)-(3)式中:M为车辆质量;V为车辆速度;F为车轮摩擦力;I为车轮转动惯量;ω为车轮角速度;R为车轮半径;Mb为制动器制动力矩;μ为车轮与地面间的附着系数;N为车轮对地面法向反力。
1.2 制动压力与电磁阀状态的关系
车辆制动系统中的电磁阀,是决定制动压力增减的关键部件,它有开、关、保持3种状态。根据文献[5],结合我们在前期工作中对电磁阀特性的试验数据,可得(设电磁阀每个状态保持的最小周期为ΔT):

(4)式中:PL(n-1),PLn分别为电磁阀在经过第 n-1次、第n次状态改变后的制动轮缸压力,其中n≥ 1;m1,m2为由试验数据拟合而得的系数;ΔP为增压常量。
1.3 制动器模型

(5)式中:KP为制动器制动因数;MbL为制动器的制动力矩;PL为制动轮缸压力。KP是由制动器的结构参数及使用工况决定的。
2 车辆制动稳定性特性分析
四轮车辆(汽车)制动时,由于地面受力的不平衡,车辆所产生的横摆力矩表示为[5]

(6)式中:ΔM为整车的横摆力矩;Fxi为车轮纵向摩擦力(设 i=1,2,3,4分别对应左前、右前、左后、右后);Fyi为车轮侧向摩擦力;L为车轮轮距;λF,λR分别为前轴、后轴到车辆质心的距离。由(6)式可知,横摆力矩是由纵向力与侧向力的联合作用决定的。典型路面附着系数与滑移率曲线如图2所示。由图2可知,在滑移率 S[5]为[0,100%]的绝大部分区间内,如果在同一种路面并且滑移率相同,那么侧向附着系数μ的大小明显小于纵向附着系数μ的大小,因为车轮对地面的法向反力N的大小在同一时刻保持不变,根据(3)式,F与μ可以看作成正比关系,因此可以得到Fyi≪Fxi。并且根据(6)式,前轮的侧向力与后轮的侧向力的方向相反,这在一定程度上削弱了侧向力对横摆力矩的影响,因此,侧向力对横摆力矩的影响远小于纵向力。为了便于分析,这里将侧向力对横摆力矩的影响忽略掉,主要考虑纵向力的影响。

图2 典型路面附着系数与滑移率曲线Fig.2 Friction coefficient and sliding rate curve on typical road
对后轴驱动的车辆,在制动过程中,前轮的受力情况对方向性和操纵性有决定性影响[6]。而方向性和操纵性又决定着制动的稳定性,因此这里着重研究前轮受力分析。
根据上面分析,由于前轮地面制动力的不同,产生的横摆力矩表示为

设2个前轮的转动惯量I的大小相等,根据(2)式,前轴两轮的运动方程分别表示为

(13)式中:a1,a2分别为前轮的加减速度;I,KP,R,L均可视为常量,变量为a1-a2与p1-p2。由(13)式可知,横摆力矩ΔMf与前轴两轮加减速度差a1-a2和制动轮缸压力差p1-p2有关。因此,可以通过a1-a2,p1-p2的相互关系来研究车辆制动时的横摆力矩特性。
3 车辆制动稳定性模糊协调控制器设计
为了对横摆力矩实现有效控制,需要设计合适的控制器(策略),通过对(13)式的分析可知,各变量之间存在着复杂的非线性关系,参数之间难以建立精确的数学模型。由于模糊控制不依赖于精确的数学模型,因此,它非常适合解决参数之间具有复杂的非线性且难于建立精确数学模型的车辆ABS(antilock brake system)控制场合[7-8]。
由于a1-a2能够由轮速和采样周期通过数学运算获取,可视为已知量。根据(13)式,为了减小ΔMf,必须依据a1-a2的大小,适当地改变p1-p2的大小。例如,如果a1-a2较大,则需要快速减小p1-p2的值,如果a1-a2较小,则需要快速增大p1-p2的值。因此,为了获取满足要求的p1-p2的值,就需要协调制动压力p1和p2的大小。图3为车辆制动稳定性的模糊协调控制结构图。
该模糊协调控制器的设计包括控制器的输入、输出语言变量的确定、控制规则及推理方式的确定等,其中,输出语言变量之间存在非线性数学关系。输入变量为a1-a2,根据实际经验,论域为[-60 m/s2,60 m/s2]。输出变量分别为制动压力p1,p2,论域为[0,0.48 MPa]。设a1-a2的模糊子集为A,采用的输入语言变量隶属度函数如图4所示(负大NB,负小 NS,零 ZE,正小 PS,正大 PB)。p1,p2的模糊子集分别为C和D,采用的输出语言变量的隶属度函数如图5 所示(零 ZE,正小 PS,正中 PM,正大 PB,正最大PL)。根据上面的分析,为了减小ΔMf,需使p1-p2依据a1-a2的大小进行改变,而p1-p2的改变则通过协调调节制动压力p1,p2的大小进行实现。因此,p1,p2是依据a1-a2及p1,p2之间的非线性关系进行调节的。按照以上思想,控制时先假定p2不变,则依据a1-a2制定出制动压力p1的模糊控制规则I1,如表1所示;然后依据a1-a2和p1,p2的非线性关系制定出p2的模糊控制规则I2,如表2所示。


表1 求解p1的模糊控制规则I1Tab.1 Fuzzy control rule for p1
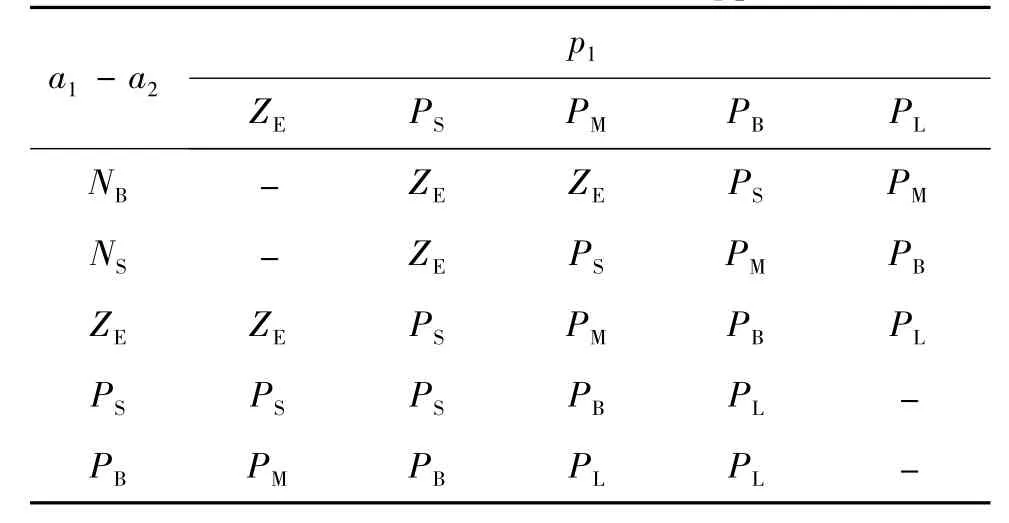
表2 求解p2的模糊控制规则I2Tab.2 Fuzzy control rule for p2
模糊推理采用Mamdani推理法,根据表1和表2的规则分别进行如下推理:

(14),(15)式中:Rl,Rm分别为压力p1,p2对应的各条推理规则;Ai为输入模糊子集元素;Cj,Dk为输出模糊子集元素。
采用Min-Max重心法来反模糊化,得到的模糊输出分别为

(16),(17)式中:k1,k2为输出比例因子;μCj,μDk为各输出模糊子集获得的权重。这里,p1,p2为模糊协调控制器计算出的左前轮、右前轮制动轮缸压力的理论值。但在ABS系统中,左前轮、右前轮制动轮缸压力的实际值与该控制得到的理论值一般是有差异的。因此,在实际的ABS控制系统中,得到轮缸压力的理论值后,可根据该理论值来控制电磁阀的状态,以改变制动轮缸的实际压力值,使其达到轮缸压力的理论值,从而实现控制目的。电磁阀状态与制动轮缸的实际压力值关系见(4)式,从(4)式知,实际制动压力(增压、减压、保压)与电磁阀状态(开、关、保持)及各状态的控制次数有关。这里,通过控制电磁阀来调节左前轮制动压力为例,阐明轮缸制动压力控制的具体实现,即通过(4)式计算出当前实际制动压力PLn,与模糊控制计算出的制动压力理论值p1进行比较:若PLn<p1,则增加电磁阀的增压控制周期次数,直到PLn按(4)式变化后接近p1;若PLn>p1,则增加电磁阀的减压控制周期次数,直到PLn接近p1;若PLn=p1,则保持。
最后,左前轮、右前轮制动轮缸的实际压力可分别为 p1,p2,而由(13)式知,I,KP,R,L,a1- a2为已知量,p1-p2与a1-a2对应表达式的值部分甚至完全抵消,以至横摆力矩ΔMf值减小甚至为0。因此,通过对制动压力的模糊协调控制,再改变电磁阀的状态使得实际的ABS制动压力可控,最终可以减小甚至消除车辆的横摆力矩。
4 道路试验
4.1 试验条件
为提高车辆制动稳定性控制器的数据处理能力,采用了以Freescale系列的MC9S12DP256B为核心控制芯片。在此基础上,自行开发了车辆ABS控制器(ECU)。设计了车辆ABS实验数据分析软件,加上4个磁阻式轮速传感器、ECU、上位机标定系统等,搭建了某型汽车的ABS测试控制系统,着重对ABS工作中的制动稳定性进行试验研究。试验车辆参数如表3所示。

表3 试验车辆参数Tab.3 Vehicle parameters
本文设计模糊协调控制程序时,通过轮速传感器采集车轮速度,根据轮速和采样周期计算出车轮加减速度,以前轴两侧车轮的加减速度差作为模糊控制器的输入量。在某试车场进行了高附着系数路面、低附着系数路面、对开路面下的道路试验。为了验证协调控制算法的有效性,有必要把它与各个车轮独立控制法进行道路对比试验。参照GB/T13594-2003法规要求,给出了在初速为80 km/h时,汽车在高附着系数路面制动过程中,运用不同控制策略测试的汽车横摆力矩如图6所示;初速为50 km/h时,在低附着路面制动过程中,运用不同控制策略测试的横摆力矩如图7所示。此外,汽车在对开路面制动下,由于车辆两侧路面附着系数差别较大,制动力严重不平衡会使汽车偏向高附着系数一侧,故采取独立控制策略进行道路试验比较危险,为了对制动效果进行有效评价,在初速为50 km/h时,采用国外某成熟的ABS控制器、本文设计的模糊协调控制器对比测试汽车轮速和横摆力矩,具体效果如图8-图10所示。


4.2 试验结果分析
由于试验条件的限制,可以将车辆具体参数、a1-a2、模糊控制输出量p1-p2带入(13)式,以估算出横摆力矩的大小。通过与各个车轮独立控制算法进行比较,经过分析汽车在不同路面制动下的测试数据后发现,采取模糊协调控制策略的汽车制动稳定性得到了明显的改善。
从图6和图7中可见,采取车轮模糊协调控制使汽车制动横摆力矩比车轮独立控制有了明显的降低。从图8—图10可见,采取模糊协调控制器,使得汽车轮速和横摆力矩大小的变化接近国外某成熟ABS控制器的效果,验证了模糊协调控制的有效性。
5 结论
不同制动条件下的道路测试表明,相对于各个车轮独立控制,模糊协调控制可以降低横摆力矩的大小,改善了汽车制动时的稳定性,且与国外成熟产品性能接近。
利用推导出的横摆力矩与前轴两侧车轮的加减速度差、制动轮缸压力差之间的相互关系,来进行车辆制动稳定性的模糊协调控制设计是可行的,有利于解决车辆制动时车轮受力不平衡而导致的制动不稳问题;且该方法只需要检测车轮的加减速度,不需要添加传感器和硬件设备,具有良好的实用推广价值。
[1]唐国元,宾鸿赞.对开路面制动车辆稳定性的控制方法及仿真[J].计算机仿真,2008,24(3):254-256.
TANG Guo-yuan,BIN Hong-zan.A Control Approach for Brake Stability of Vehicle on Splitter Road and Its Simulation[J].Computer Simulation,2008,24(3):254-256.
[2]NAGAIM,SHINOM,GAO F.Study on integrated control ofactive frontsteer angle and directyawmoment[J].JSAE Review,2002,23(3):309-315.
[3]YIN G D,CHEN N,LIP.Improving handling stability performance for four-wheel steering vehicle via u-synthesis robust control[J].IEEE Transactions on Vehicular Technology,2007,56(5):2432-2439.
[4]PIYABONKARN D,LEW JY,RAJAMANIR,etal.On the use of torque-biasing systems for electronic stability control:limitations and Possibilities[J].IEEE Transactions on Control Systems Technology,2007,15(3):581-589.
[5]程军.汽车防抱死制动系统的理论与实践[M].北京:北京理工大学出版社,1999.
CHENG Jun.Theory and practice of auto anti-lock braking system[M].Beijing:Beijing institute of technology press,1999.
[6]谭龙.ABS前轮控制模式[J].客车技术与研究,2000,22(1):30-32.
TAN Long.Front Wheel Control Mode of ABS[J].Bus Technology and Research,2000,22(1):30-32.
[7]李锐,郑太雄,李银国,等.汽车防抱死制动系统分级智能控制[J].机械工程学报,2007,43(8):135-141.
LIRui,ZHENG Tai-xiong,LIYing-guo,et al.Hierarchical Intelligent Control of Automobile Anti-Locik Braking System[J].Chinese Journal ofMechanical Engineering,2007,3(8):135-141.
[8]李锐,郑太雄,冯辉宗,等.基于模糊自适应的汽车ABS路面辨识技术[J].重庆邮电大学学报:自然科学版,2007,19(2):202-205.
LIRui,ZHENG Tai-xiong,FENG Hui-zong,et al.Road automatic identification of automobile ABS via fuzzy adaptivemethod[J].Journal of Chongqing Universitiy of Posts and Telecommunication:Natural Science Edition,2007,19(2):202-205.
(编辑:魏琴芳)
