TYTK型停车防溜控制系统与编组站综合自动化系统的结合
2011-02-02窦伟
窦 伟
TYTK型停车防溜控制系统与编组站综合自动化系统的结合
窦 伟*
编组站的驼峰和编尾主要完成货物列车的解体和编组,。为了防止溜放的车组冲过停车线进入尾部咽喉区,需要在编组站驼峰尾部配置停车防溜控制系统。为此,研究TYTK型停车防溜控制系统,以及与SAM系统的结合。
编组站;综合自动化;停车防溜器;控制系统
编组站的驼峰和编尾主要完成货物列车的解体和编组。解体的车辆经驼峰头部溜放进入停车线时,尾部根据作业计划进行编组。为了防止溜放的车组冲过停车线进入尾部咽喉区,传统的防溜停车手段是放置铁鞋或人工手闸制动。这些手段作业效率低、耗费大量的人力,作业人员的人身安全也得不到保障。可控停车器已逐渐在繁忙的铁路编组站被使用,节省了人力,提高了效率,保证了人身安全。驼峰溜放自动控制系统和编尾计算机联锁系统的推广,为编尾停车防溜自动控制系统的使用提供了条件,TYTK型停车防溜控制系统已在我国多个编组站尾部投入使用。新丰镇新一代编组站综合自动化(SAM)系统的实施促进了TYTK型停车防溜自动控制系统的完善。
西北地区和北方地区铁路的车站站内到发线存在下坡情况较多,且北方风大,停留在到发线的车辆存在溜逸的危险。溜逸的车辆进入区间,将会造成重大的行车事故。为了防止停留车辆溜逸,车站多采用铁鞋方式制动。铁鞋制动不能保证作业人员的人身安全,而且列车发车时铁鞋不及时撤离会造成列车脱钩或脱线。所以,停车防溜控制系统在北方地区到发线防溜控制中将有广泛应用前景。
1 可控停车防溜器
可控停车防溜器(以下简称停车器)是依靠制动轨与车轮的摩擦来实现对进入的车辆停车防溜控制的,有2种位置,即制动位和缓解位。停车器处于制动位时,起停车防溜作用;停车器处于缓解位时,允许车列通过,便于编组作业。按制动力产生方式停车器可分为电动、机械、气动、液压式等几种,但使用最多的是液压混合式。本文仅说明液压混合式停车器工作原理。
液压混合式停车器的工作原理是制动依靠弹簧机械动力,缓解依靠液压动力压缩弹簧。这样,改进了全液压式长时间油泵处于高压状态出现的漏油问题。图1是T.TK-92C型可控停车器制动臂结构。当停车器处于制动位时,在弹簧的作用下,通过支撑臂使两侧制动轨之间的距离保持在(1365±2)mm,大于车辆轮对内侧距(1353±3)mm。此时弹簧处于预压状态。当溜放车组进入停车器时,车轮内侧面挤压停车器两根制动轨作业面,迫使支撑臂上弹簧再度压缩。在弹簧反作用力的作用下,停车器的制动轨作用面与车轮内侧产生摩擦力,使溜放车组减速,直至停车,达到停车防溜的目的。当停车器由制动位向缓解位转换时,液压站电机驱动油泵,使油缸总成动作。由于油缸产生的拉力,大于弹簧的张力,致使弹簧被拉紧压缩,此时,停车器两侧制动轨作用面间距小于1350 mm。这样被制动车辆或调车机可在无阻力情况下顺利通过。
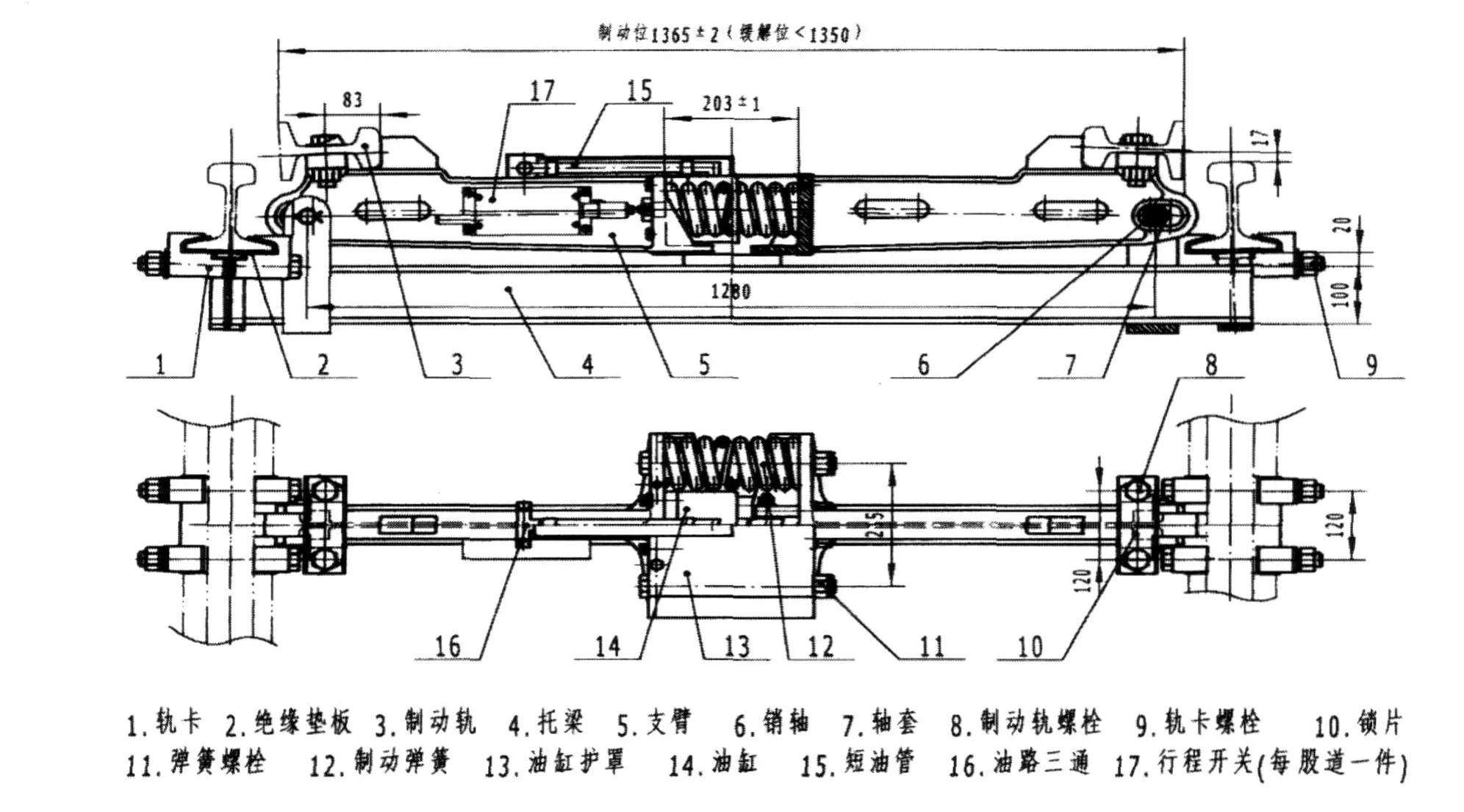
图1 T.TK-92C型可控停车防溜器制动臂结构
2 TYTK型停车防溜控制系统
控制系统以继电方式与可控停车器接口,采集停车器位置表示继电器接点,通过驱动安全型继电器控制停车器的制动和缓解。系统主机采用双机热备结构的工业控制计算机,执行部分采用故障-安全设计的智能型FIMI采集板和FIMO驱动板。图2是TYTK型停车防溜控制系统结构。
FIMI为32路采集模块, FIMO为16路驱动模块,其工作周期为200 ms。FIMI和FIMO模块具有完善的自诊断功能,系统周期性检测采集驱动回路正确与否,任意一路采集或驱动回路故障均可及时检出。通过硬件冗余的方法,实现容错目的。安全智能模块采用双CPU结构,通过双CPU间比较校验,保证命令的正确执行。CPU负责CAN总线和控制机通信、双CPU之间的通信、采集驱动命令的执行以及采集驱动回路的自诊断等工作。系统的每一个模块均为双套热备方式工作。控制系统和安全智能IO系统通过CAN总线进行实时通信。信息传输采用CRC编码和正反码重传机制等冗余技术,来保证信息安全传输。
3 编组站尾部停车防溜控制逻辑
在编组站尾部停车线上安装停车器,主要是防止驼峰溜放的车组冲过停车线进入尾部咽喉区。驼峰进行溜放作业时,要求停车器处于制动位;尾部编组作业时,要求停车器处于缓解位。
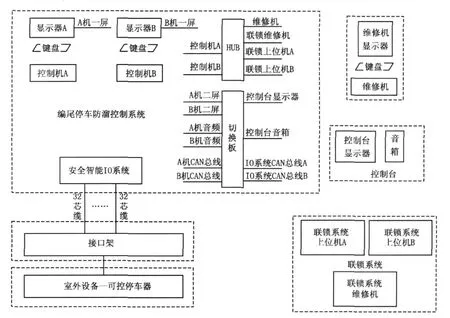
图2 TYTK型停车防溜控制系统结构
停车器防溜控制系统的主要技术条件及基本功能如下。
1.向股道排列调车进路后,信号开放(要求离股道最近的开通股道方向的信号机必须开放),当机车或车列压入规定的轨道区段后,控制系统自动向该股道的停车器发出缓解命令。该轨道区段是根据停车器动作时间确定的,以便车列到达停车器前,停车器处于缓解位置。该区段为股道头部信号机内方第二个区段(离股道有2个区段的走行距离)。
2.控制系统对停车器发出制动命令时机:当排列牵出股道的调车进路后,股道头部信号开放,机车或车列出清股道信号机接近区段,股道头部信号机关闭后,控制系统向该股道停车器发出制动命令。
3.尾部以单钩溜放方式(建立溜放状态,信号白闪)作业时,控制系统不发缓解命令,停车器保持原位置。
4.当头部溜放车辆越出可控停车器,并逸溜至股道牵出调车信号机接近区段时,系统能自动发出报警信号。
5.采用彩色监视器显示站场表示,包括停车器位置表示、进路表示、信号显示及机车或车列占用表示。
6.系统增加了停车器封闭设置功能。当停车器要点维修时,可将该股道停车器设置为封闭状态,以防止计算机发出控制命令造成停车器动作,对维修人员造成伤害。
7.控制台上设置“自动/手动”切换按钮。手动方式时,计算机停止自动命令的发送,停车器控制完全人工操纵;自动方式时,计算机根据尾部调车作业自动控制停车器的制动和缓解,此种状态下手动也能优先对停车器进行控制。
4 停车防溜控制系统与SAM系统结合
4.1 系统结合的必要性
应用编组站综合自动化系统的铁路枢纽,各个站场配置计算机联锁系统,采用集中管理、分散控制的模式,实现编组站作业的适度集中和人机互动。集中控制和表示系统是编组站自动化的核心环节。编组站枢纽内实现了信息化传输和列车编组作业各工作环节的实时控制。旧有的使用“铁鞋”、“人工手闸制动”模式防止车辆溜逸,既无法保证人身、设备安全,也无法实现防溜控制的信息化管理和实时控制。使枢纽内编尾场的防溜控制水平落后于整个编组站的控制水平,成为整个管理系统的短板,从而制约编组站系统安全管理水平的提高。停车防溜控制系统必然成为编组站管理的必要组成部分。
4.2 系统结合方式
编组站综合自动化控制系统信息网络包括:控制信息网、综合信息网、GSM-R无线通信网。其中控制信息网为安全信息传输网络,负责全部控制信息的传输。停车器防溜控制系统属于实时安全控制系统,与各个站场的计算机联锁系统一样,接入控制信息网。由编尾计算机联锁系统提供编组站的站场实时信息。停车器防溜控制系统根据站场实时信息经过逻辑运算,控制室外停车器的制动、缓解等动作。停车器防溜控制系统接收安全信息网传输的控制命令,编组站综合自动化控制系统可以向停车器防溜控制系统自动发送控制命令,也可以遵循集中自动控制模式下“人工干预、人控优先”原则,接收车站信号员在站调楼集中控制台对停车器人工操作的指令。
4.3 系统结合的优势
停车器防溜控制系统的主要作用是防止溜放的车组冲过停车线进入尾部咽喉区。在自动化驼峰场控制系统内配置了大量调速设备,以保障驼峰头部解体的车辆经驼峰场溜放进入停车线时达到规定的速度,保证作业安全。可以把编组场尾部配置的停车器防溜控制系统作为驼峰调速设备的有益补充。停车器防溜控制系统与编组站综合自动化系统的结合,可以实现编组场尾部的停车器与驼峰调速设备的统一管理和调度,实现驼峰场控制人员对编组场尾场停车器设备的实时监控,提高了编组场尾部运用的安全管理水平。
5 结束语
TYTK型停车防溜控制系统已经在许多车站使用。该系统已在新丰镇编组站,实现了与编组站综合自动化系统的结合,系统投入运营后,运行稳定,安全可靠。随着编组站综合自动化系统的成功推广,以及铁路系统对编组场尾部安全管理水平的提高, TYTK型停车防溜控制系统具有广阔的应用空间。
[1] 中华人民共和国自动化驼峰技术条件.TB/T2306-2006.
[2] 赵志熙.计算机联锁系统技术[M].北京:中国铁道出版社,1999.
[3] 铁道科学研究院通信信号研究所.TYJL-Ⅱ计算机联锁控制系统研究报告[R].北京:铁道科学研究院, 1997.
The hump and the tail of amarshalling yard are designed to complete the breaking-up operations and making-up operations of freight train sets.In order to prevent train sets from overrunning the stop lines and rolling into the throats at the tail of the yard,it is indispensable to deploy an anti-slip retarder control system at the tail of the yard.Thus,we developed TYTK type anti-slip retarder control system,which can be connected with Synthetic Automation ofMarshalling Yard.
Marshalling yard;Synthetic automation;Anti-slip retarder;Control system
*中国铁道科学研究院通信信号研究所助理研究员,100081北京
2011-01-21
(责任编辑:张 利)
