无位置传感器直流无刷电机控制的研究
2011-01-25庄乾成杜豫平
庄乾成,杜豫平
(苏州信息职业技术学院 通信与信息工程系,吴江 215200)
0 引言
永磁无刷直流电动机由于结构简单、运行可靠、维护简单以及运行效率高、无励磁损耗、控制等优点,被广泛用于电动汽车、仪器仪表、轻纺等行业,而无位置传感器的永磁无刷电动机具有成本小、维护方便, 抗干扰能力强等优点,成为其发展方向,本设计主要研究对无位置传感器的永磁无刷电动机的工作原理、速度控制以及位置检测等。
1 无刷直流电动机工作原理
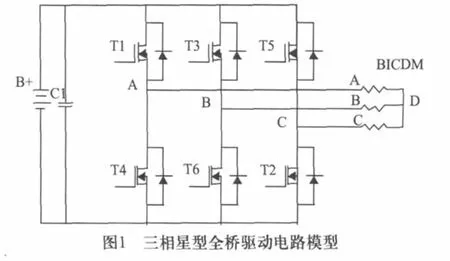
无刷直流电动机控制分为全桥式和半桥式,而按电机绕组结构分星型和三角形,全桥星型接法的电动机有转矩脉动小,输出转矩大特点,因此本设计采用三相全桥星型电机,如图1所示,无刷直流电动机通过位置检测电路检测无刷直流电动机端电压,经微处理器运算后得到电机转子的位置信号,再由驱动电路按转子位置信号轮流导通功率逆变桥的六个功率管,以实现电机三相绕组的通电,三相桥式星型结构的无刷电机任意时刻两相绕组导通,第三相处于悬空状态,功率管有6种触发状态,每次只有两只管子导通,每隔1/6周期(60°)电角度换向一次,每次换向一个功率管,每一个功率管导通120°电角度,所以每次只有两相导通,另一相截止,导通相电流大小相等,方向相反,非导通相电流为零。如设无刷直流电机开始导通A,B相,此时功率管T1和T6导通,电流由A流入,由B相流出,此状态维持60°电角度后开始换相,T6关断,T2导通,此时导通相为A,C相,同样维持60°电角度后开始换相,依次各功率管导通顺序为:T1T6—T1T2—T3T2—T3T4—T5T4—T5T6—T1T6 完成一个周期转动。
2 无位置传感器无刷直流电动机硬件驱动电路
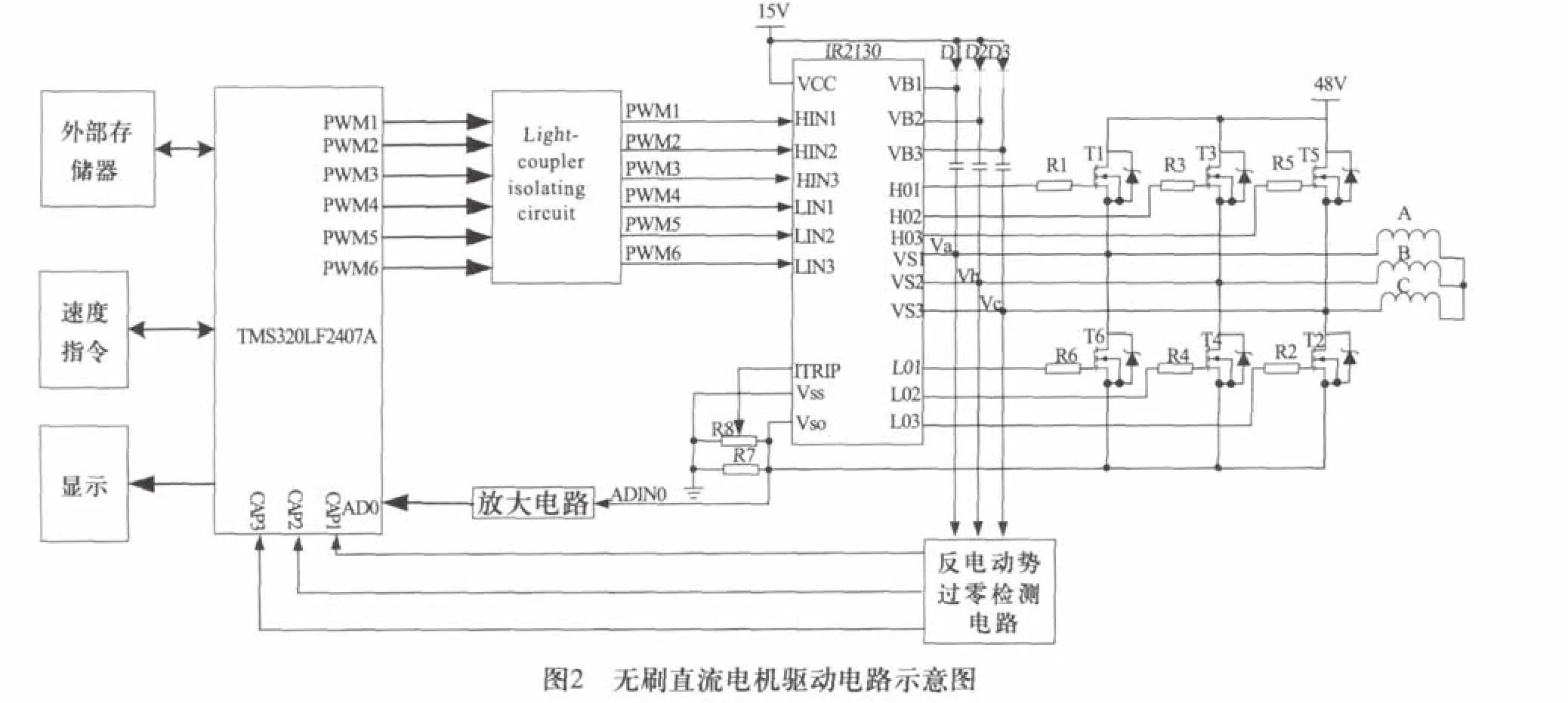
如图2所示,电路主要器件为IR2130和MOSFET功率管(T1-T6),其中驱动芯片IR2130可直接驱动高达600V电压的高压系统,并且最大正向峰值驱动电流为250mA,反向峰值驱动电流为500mA,具有电流放大和过电流保护功能,同时关断六路输出,具有欠压锁定功能并能及时关断六路输出; MOSFET功率管采用STP75NF75,其具有较快的开关速度,内部具有反向快速恢复二极管,对MOS管具有很好的保护作用,信号PWM1—PWM6 需经过隔离和缓冲器件后接控制器,FAULT引脚接控制器中断输入以处理过流保护程序,旁路电阻R7主要用来对电路电流进行采样,阻值为48Ω,其转化为电压信号后需经过放大一定倍数后接入控制器。
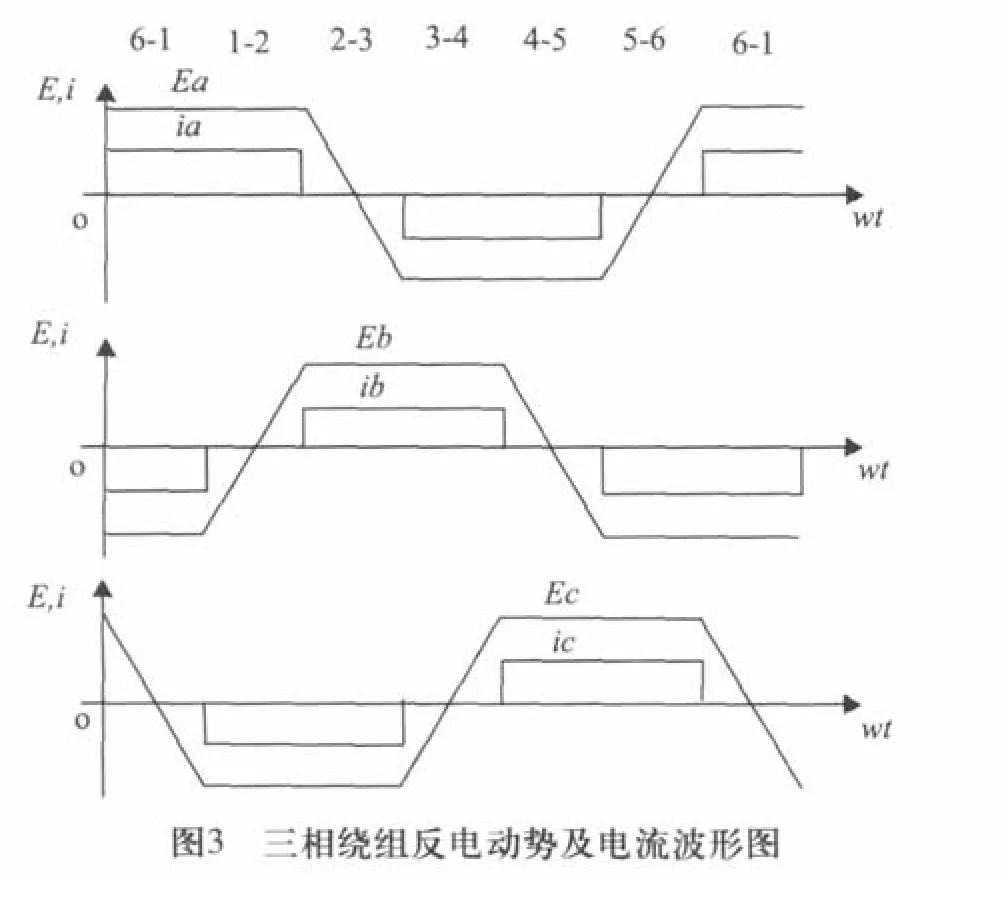
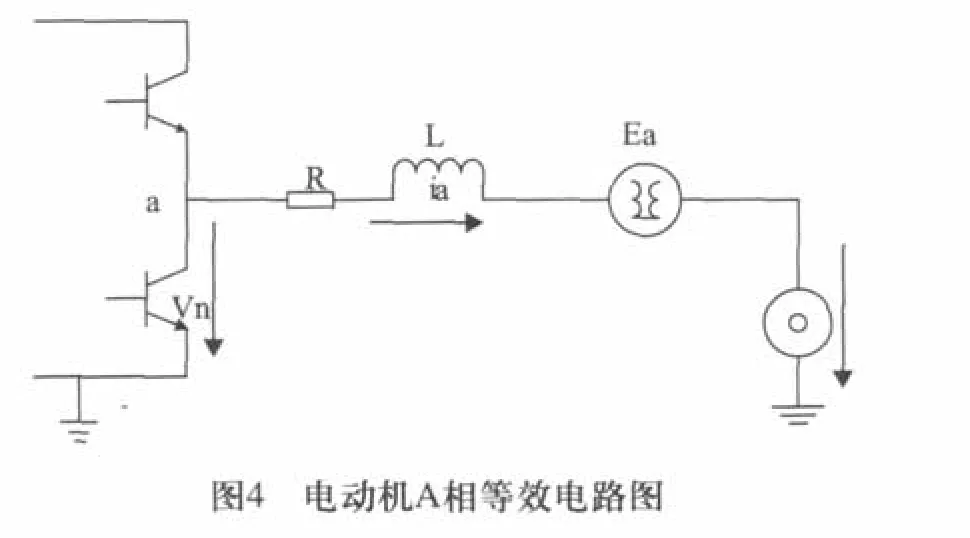
传统无刷直流电机需要靠位置传感器来得到转子的位置信号,并对电机三相绕组进行换相控制,但传感器增加了体积,成本,且受运行环境干扰影响,而采用过反电动势过零检测绕组位置成为发展趋势,无位置传感器无刷直流电动机在工作过程中,其绕组具有梯形反电动势和方波电流(如图3所示),任何时刻只有两相绕组导通,期间电机转动120°电角度,此时另一组断开因此没有电流,故其端电压反映该绕组反电动势大小即为零,电机每转一周各绕组反电动势将两次经过零点, 并且其反电动势经过过零点时领先该相绕组转换信号30°电角度。因此根据各绕组反电动势过零点(相对于定子绕组中心点)检测即可用于处理器控制产生绕组换相信号。但由于定子绕组中心点电动势很难直接测量,但是可以通过对相关信号处理间接得到定子绕组中心点电动势;如图4所示为电机A相电路示意(B相、C相同理),Va为A相电压,R、L分别是电机A相线圈等效电阻和电感,Ea为A相反电动势,Vn是电机定子绕组中心点对地电压,由图分析可知A相电压方程式:
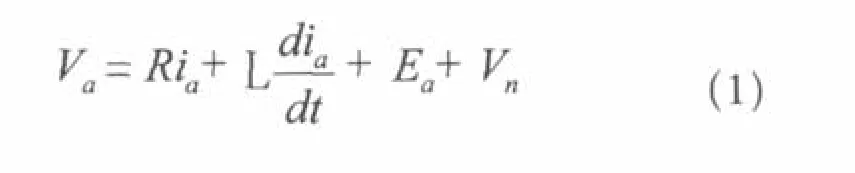
同理B相和C 相电压方程分别为:

因为电机运行时,每一时刻只有两相绕组导通,并且这两相绕组电流幅值相同而方向相反,此时第三相电流为零,因此以上三个方程相加得到:

三相电机任何一相经过零点时瞬间时Ea+Eb+Ec=0,因此过零点时可得到定子绕组中心电压计算方程为:

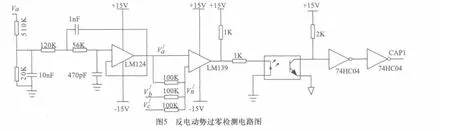
由图5可知,某相电流为0时,其反电动势也 为 0, 如 Ea=Va-Vn, 当 Va=Vn时,En=0,因此根据各相电压检测,则定子中心电压即可得到,当相端电压和定子中心电压相等时,即检测到反电动势过零点,根据反电动势波形可知,延时30°电角度后即为换相点。具体检测电路如图5所示,相电压经过电阻分压后进行滤波得到Va′信号,并与Vn′信号通过比较器得到方波信号,并经过光耦隔离后信号送DSP检测处理,途中Vb′、Vc′分别为Vb、Vc经过相同电路滤波得到的信号。
3 无传感器无刷直流电动机速度控制
无传感器无刷直流电动机速度控制是直流电机控制器根据给出的速度作为参考速度,采用双闭环控制即速度闭环和电流内环如图6所示,控制器根据给定的参考速度和实际检测速度之差进行比例积分运算,根据运算结果对电机进行调速控制;电流调节同样采用比例积分微分调节方式根据计算结果,配置合适的PWM占空比,使电机在启动和加速时能起到限流和限幅作用,使绕组电流快速达到和稳定在最大值,对电机起到保护作用, 同时对电源和负载扰动等抗干扰能力得到增强。设计中,速度比例微分积分(PID)调节和电流比例微分积分(PID)调节均采用软件实现。
速度PID调节是一种线性控制,其控制模型如图6所示,其根据给定参考速度值v1(t)和实际检测值v2(t)之间的差值:
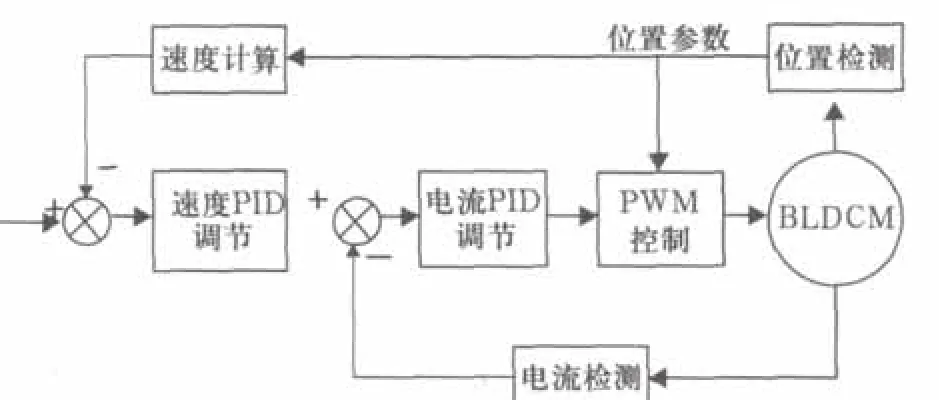
图6 系统闭环控制结构图

其差值按照比例积分微分进行组合,计算出控制量u(t),并通过控制此控制量来达到被控值对象的控制,输入输出关系为:

其中kp为比例系数,Ti为积分时间常数,Td为微分时间常数。
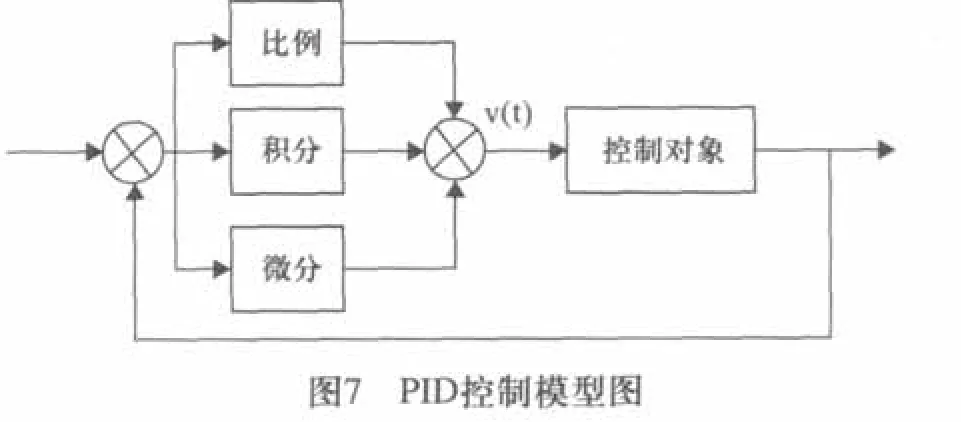
比例调节相当于控制系统的粗调,可以是系统控制的比较稳定,而积分调节则是相当于微调,能保证系统调节比较准确,微分调节则保证系统调节速度较快,从上式可以看出影响系统调节三个参数分别为kp、Ti、Td,为了更好的达到控制效果,必须对此参数进行整定。本设计主要采用Ziegler-Nichols整定法,整定在仿真过程中首先将常数Ti置无穷大,微分时间参数Td置零,比例参数kp置一定值,运行系统;然后将kp逐渐减小,直至得到等幅震荡过程,记下临界增益ku即临界周期Tu;最后根据ku、Tu值按照表1中经验公式,计算kp、Ti、Td参数。
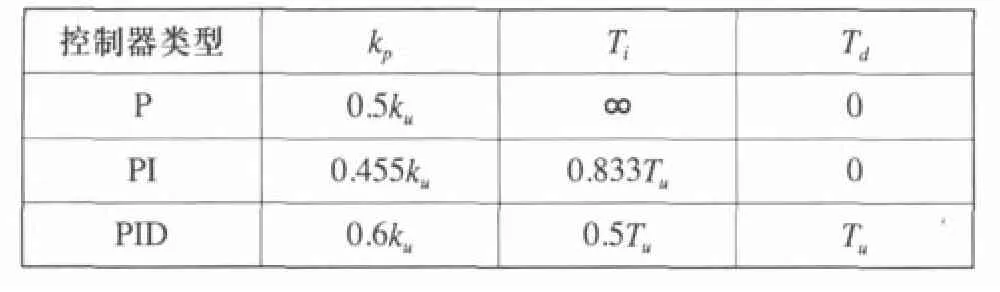
表1 Ziegler-Nichols法参数整定
4 实验结果
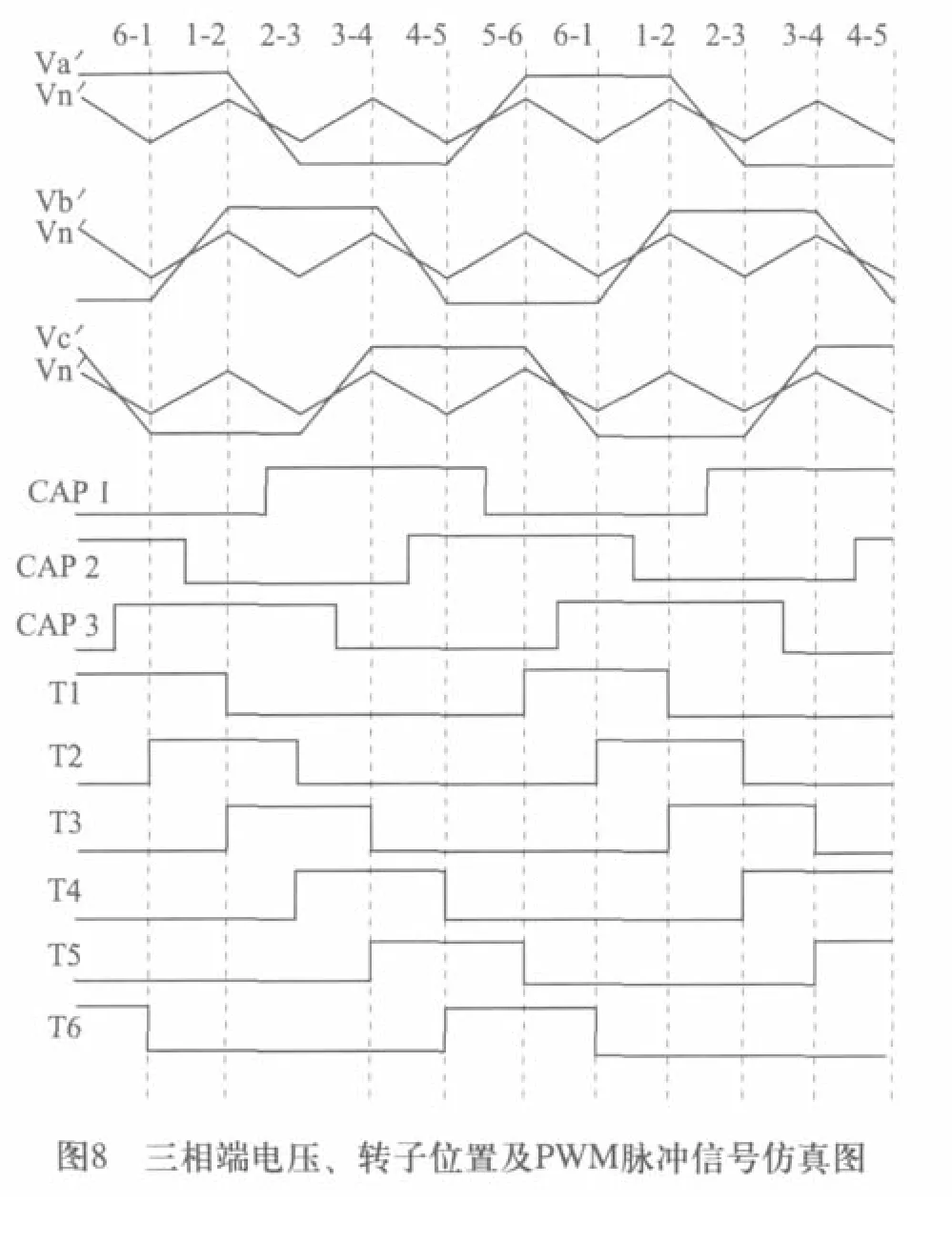
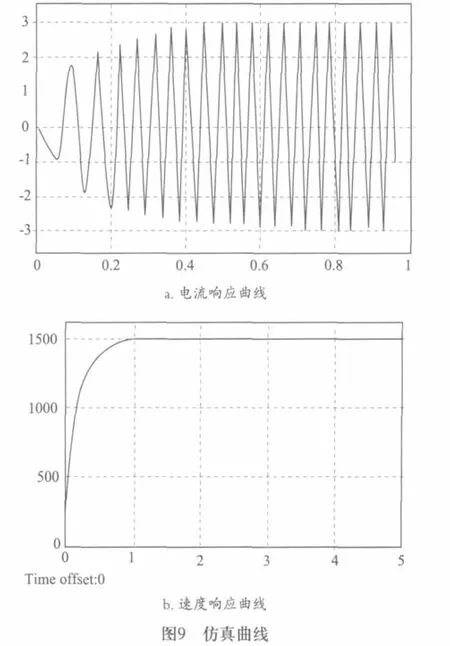
如图8为每相绕组电动势过零点检测波形,Va′、Vb′、Vc′是各项端电压经过滤波后得到信号,而Vn′是转子中心点电压信号,CAP1、CAP2、CAP3是检测转子位置输入信号,T1 T6是6个从DSP输出的用于触发MOSFET功率管的脉冲信号,通过波形可知过零检测控制比较理想。系统根据此种算法通过Matlab仿真如图9所示,可知电流曲线比较理想,在速度为1500/r情况下快速平稳。
5 结束语
本文对无位置传感器直流无刷电机控制器设计、反电动势过零检测以及速度控制等给出一定的方法,研究表明采用此种方法,硬件投入少、电路简单,降低了设计成本,提高了系统的稳定性和可靠性。
[1]Wu Xiaojing,Zhou Bo,Song Fei,Chen Fangshun,Wei Jiadan,“closedloop control method to correct position phase for sensorless BrushlessDC motor,”ICEMS,2008(10): 1460-1464.
[2]吴春华,陈国呈,孙承波. 一种改进的无刷直流电机无位置传感器检测技术[J].电气传动自动化,2005,27(3):31-33.
[3]王宏伟,梁晖.无位置传感器无刷直流电机的 DSP控制[J].电力电子技术,2005,39(6): 102-104.
[4]韩安太 ,刘峙飞 ,黄海.DSP控制器原理及其在运动控制系统中的应用 [M].北京: 清华大学出版社,2003.
