基于AD1674采集弹簧的分选系统采集模块设计
2011-01-13乔桥
乔 桥
(武汉纺织大学 机械工程与自动化学院,湖北 武汉 430073)
基于AD1674采集弹簧的分选系统采集模块设计
乔 桥
(武汉纺织大学 机械工程与自动化学院,湖北 武汉 430073)
弹簧弹性力测试分选系统是对大批量生产的弹簧依据其弹性系数不同,按照预先规定的指标进行测试,自动筛选出合格与不合格产品,并在不合格产品范围内依据是否可以修复将弹簧进一步细分,自动流入不同料箱,以用于不同场合。而在整个系统中,AD采集模块及采集软件的实现则是核心需要。
弹簧弹性力测试分选系统;AD采集模块;采集软件
1 前言
近几年来,国内弹簧工业的产品设计制造工艺生产设备以及弹簧的材料等方面都有了新发展,同时对应用弹簧的要求也越来越高,一只弹簧有多个参数需要检测,如负荷、刚度、柔度等,其中负荷是最常见的检测指标,它表明了在指定变形的情况下,该弹簧所产生的负荷值,用以控制自动机械所需要的动力,同时又不至于产生过大的载荷。所以,能实现弹簧检测的智能化分选设备的开发,也成为弹簧工业发展的需要和必然趋势。
弹簧分选系统的设计涉及到机械、电子、气动等各学科领域的技术,是一个典型的机电一体化系统。而该系统中AD采集模块的设计则是核心技术。
2 AD采集模块硬件设计
本系统主控CPU为奔腾386核心芯片组,而我们的AD采集模块实质上即为基于主控CPU的PC总线的扩展模块。
2.1 称重传感器的选型
正如前言所说,检测弹簧主要指标为弹簧的负荷,即弹簧在压缩到规定程度,所输出力值的大小,而该系统采用称重传感器将力值信号转化为电信号。最后,选用国际流行的双梁式S梁结构的S型称重传感器,这种传感器输出对称性好,测量精度高,结构紧凑。其额定输出为 20mv,输出非线性度为满量程的-0.03%—+0.03%,由于传感器的输出为毫伏信号,而AD采集模块接收的是伏信号,所以通过称重传感器的电信号应经过放大。我们采用有源放大原理,其原理图如图1。
通过有源放大电路后,我们将传感器的毫伏信号转换成0-10V的直流电压信号。
2.2 AD采集电路的设计
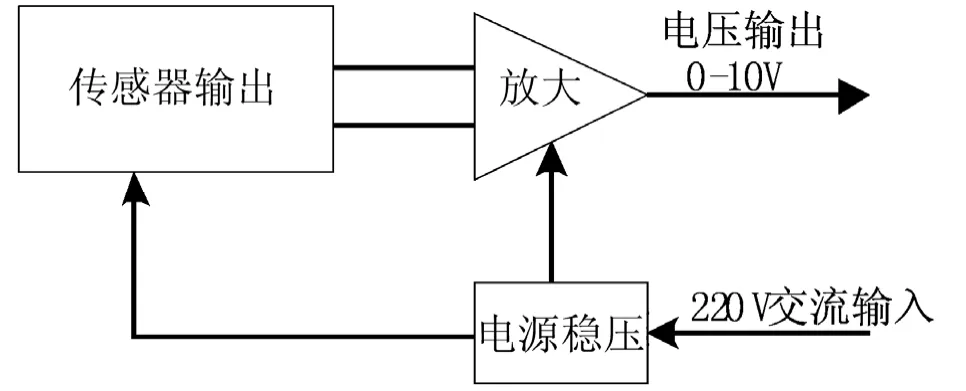
图1 信号放大器原理方框图
由于主控CPU为奔腾386核心芯片组,所以必须基于PC总线[3]进行适当的端口扩展才能设计AD采集电路。
通过 PC总线的扩展,本系统 AD采集模块使用的地址范围为 200H-202H,I/O地址译码部分采用74LS688比较器,通过DIP开关即可设置不同的I/O口地址范围[2]。
A/D转换器采用12位逐次逼近式快速转换器AD1674[1],该芯片是美国模拟器件公司生产的一款适用范围很广的一种AD转换器,其自生带有采样保持器和三态缓冲电路,可直接与各种典型的8位或16位的微处理器相连,而无须附加逻辑接口电路,并且与CMOS、TTL电平兼容,所以该芯片是一款集成性能很好的AD转换芯片。另外,AD1674转换速度仅为15us,以及12位的高转换精度,完全满足了本系统实时要求高,力值采样精度达到0.5牛顿的要求。
由于AD1674转换器接收的是模拟电压值,其电路的抗干扰及防止零漂能力[1]直接关系到AD采集模块的可使用性。
本系统模拟量的输入为单极性输入,AD采集模块的零点偏移及增益调整都是在设定输入为单极性的情况下进行的。而对AD1674芯片而言,其单极性输入为 0-10V,可接收有源放大器的电压信号。AD1674的调零及调增益电路如图2:
设置模拟输入电压为0-0.0012V,调整零点偏移电位器 W1,使得 AD1674的数字输出在00•••00-00•••01 之间跳动,此时零点调整好。设置模拟输入电压为+9.9964-10V,调整增益电位器 W2,使得数字量输出在 11•••10-11•••11 之间跳动,则增益认为调整好[1]。
在设计AD采集电路中,抗干扰性也是需要注意的问题。在设计中,应注意:
(1)将 AD1674芯片的数字地与模拟地在靠近芯片的地方连接在一起。
(2)芯片供电电源经过电容去耦后提供给芯片,且其地线与数字地相连。
(3)模拟信号的地线与 AD1674的模拟地相连。
2.3 AD采集芯片的供电
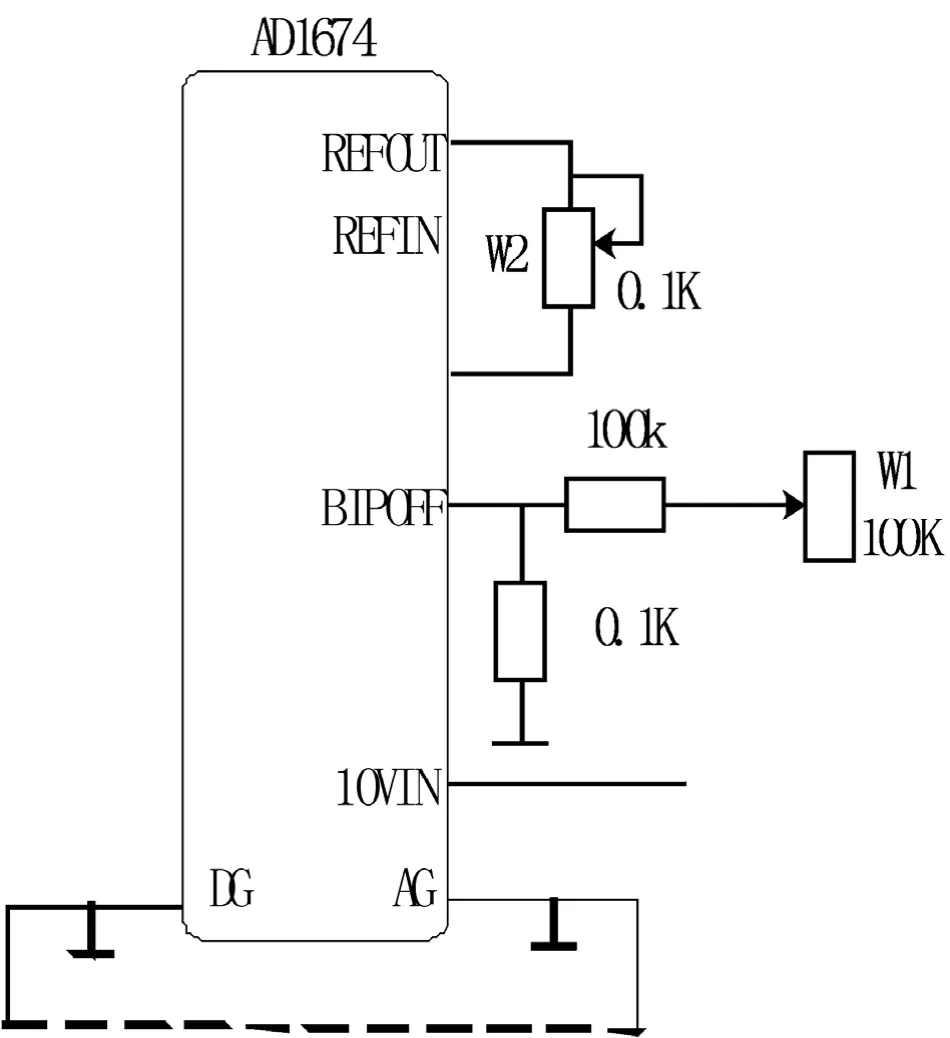
图2 AD1674零点及增益调整电路
AD1674的供电为+12V、-12V,该电压的提供要求输出纹波小,所以一般的开关电源不能满足要求。我们采用DC-DC的方式,来提供电源。24V直流电源通过整流变压、滤波、三端稳压后变为需要的12V电压。
3 AD采集模块软件设计
通过PC总线端口的扩展,我们很方便控制AD1674的采样过程,而对于模拟量的输入,除了要考虑环境温度、外界干扰、采样电路的合理性等因素外,还要进行适当的滤波,我们除了采用硬件滤波,还编制了软件滤波程序,以达到最佳的滤波效果。
3.1 AD1674控制软件
控制过程如下[3]:
(1)选择模拟量通道,启动12位变换(仅需向相关寄存器写数据即可);
(2)读AD采集状态位(读取相关寄存器相关数据位的数据,通过查询或中断方式判断AD采集是否完成);
(3)如果采样完成,则分别通过两个寄存器读出高八位、低四位数据。
由于对称重传感模块输出的电压信号为 0-10V,所以对 A/D采集模块模拟量的输入量程的选择也为0-10V。称重传感的测量范围为0-200Kg,所以通过AD采集后的数字量每一位代表的物理量为0.479牛顿。
3.2 软件滤波程序设计
3.2.1 传统滤波算法
传统的滤波算法有很多,比如算术平均值算法、加权平均值算法、中值滤波算法、一阶低通滤波算法等。比较常用的为复合滤波算法,该算法是将中值滤波和算术平均值滤波两种方法结合而成。即把采样数据按数值从小到大排列,去掉最大值和最小值将余下的采样数据求平均值,这种方法集中两种算法的优点,提高了滤波的效果。针对弹簧分选系统特点,复合滤波算法比较适合采用[2]。
3.2.2 对传统滤波算法的改进
由于本系统的采集部分采用逐次逼近式的采集芯片,其特点为采集周期短,仅需要15us既可完成一次采样,我们有充裕的时间采用更为复杂,滤波效果更好的算法来提高采样值的精确度。
本系统采用的滤波算法是以上文所提到的复合滤波算法为基础。首先,在一定时间内(当压缩弹簧趋于稳定以后),进行200次连续采样,选取重复出现次数最多的数值进行保存;而后重复以上工作20次,获取20个力值;最后将这20个力值采用以上的复合滤波算法进行处理后获得最后的采样值。
软件框图如图3。通过实验阶段,对保存值数据的分析处理,经过改进后的算法达到了预期的效果。
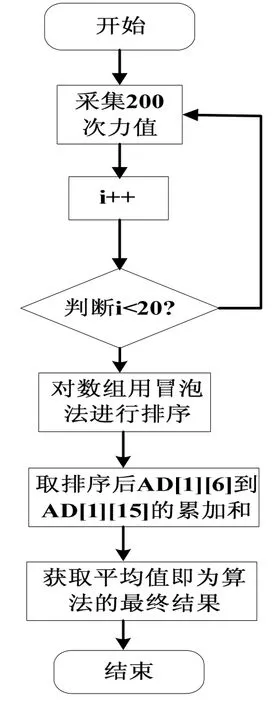
图3 AD采集软件框图
4 结论
本文介绍了弹簧分选系统中AD采集模块的总体设计思想,在软件滤波方面提出自己独特的算法,并达到了预期的效果。
[1] 李华. MCS-51系列单片机实用接口技术[M].北京:北京航空航天大学出版社, 2001.5.
[2] 卢国明,等. 单片机在弹簧测试仪中的应用[J]. 弹簧工程, 1992, (4): 45-50.
[3] 刘乐善.微型计算机接口技术及应用[M].武汉:华中科技大学出版社, 2000.4.
The Module of AD Gather to Design and Realize in the Spring Sorting System based on AD1674
QIAO Qiao
(College of Mechanics and Electronics Engineering, Wuhan Textile University, Wuhan Hubei 430074, China)
Automatic spring classification machine is the machine that can test large quantities of springs, which has different flexibility coefficients and is used in different situations, and sieve automatically qualified are different from the unqualified according to the rules proceeded in advance,it also further subdivides the spring coil according to whether it can repair within the scope of the unqualified and automatically afflux anticipate box. In the whole system, the realization that AD gathers of the module and gathers of the software is the core needs.
Elastic Strength of the Spring Tests and Sorting System; Module of AD Gathers; Gathering Software
TP273+.1
A
1009-5160(2011)06-0058-03
乔桥(1980-),男,讲师,研究方向:纺织设备数字化和数控加工.
