主动声呐舰速补偿的研究
2011-01-10刘大利刘云涛蔡惠智
刘大利,刘云涛,蔡惠智
(1.中国科学院声学研究所,北京 100190;2.中国科学院研究生院,北京 100190)
主动声呐舰速补偿的研究
刘大利1,2,刘云涛1,蔡惠智1
(1.中国科学院声学研究所,北京 100190;2.中国科学院研究生院,北京 100190)
主动声呐系统中,平台运动会导致目标回波信号存在多普勒频偏,目标的径向速度会估计错误。文中推导了本舰运动产生多普勒频偏的原因和两者之间的关系,并结合主动声呐的工作特点,提出在接收机和发射机同时进行舰速补偿的方案,可以实时响应舰船运动状态变化,准确补偿本舰运动引起的多普勒频偏。提出在发射机信号源中采用插值法,通过改变发射信号的长度进行舰速补偿的方法,该方法经过验证,解决了本舰运动时发射机产生多普勒频偏的问题。
主动声呐;舰速补偿;发射机信号源;插值
由于主动声呐平台运动(舰艇航行),目标回波会附加一个多普勒频率,舰速补偿就是消除这个多普勒频率。如果由于舰艇运动引起的多普勒频率没有被补偿,声呐目标回波经过处理后输出结果的速度估计错误,会导致动静目标识别失效,运动目标的径向速度也与真实情况不符。这种情况下,信号处理模块会产生大量虚警,无法判别目标的真实运动情况,声呐性能会受到很大影响。
李春娟采用直接数字频率合成(DDS)技术[1],王华采用坐标旋转数字计算机(CORDIC)算法[2],在接收机生成频率值为多普勒频偏的正弦波,对雷达回波进行频移,实现了舰载雷达的舰速补偿。袁鑫等提出改变MTI滤波器的凹口和对回波信号进行频谱搬移两种方法,实现了舰载雷达的舰速补偿[3]。
上述方法都是通过在接收机对回波信号进行处理实现了舰速补偿,但是在主动声呐中并不完全适用。一方面,雷达系统中,信号发射时间间隔很短,在一个周期内本舰速度几乎不变。主动声呐中,发射信号至接收到回波的时间间隔长达数秒甚至数十秒,在此期间,本舰运动状态(运动速率、航向和艏向)发生变化的概率很大。另一方面,主动声呐中经常使用的伪随机码调相信号是一种多普勒敏感的宽带信号[4],接收机进行匹配滤波时需要进行多次多普勒频偏搜索,同时需要存储大量的带有多普勒频偏的发射信号副本。当探测高速运动的目标时,如果本舰也处于航行状态,两者相对运动速度加大,如果只是在接收机进行舰速补偿,接收机不得不增加多普勒搜索范围,消耗的计算代价和存储代价很大。
综上所述,主动声呐中必须在发射机和接收机分别进行舰速补偿,才能实时响应舰速的变化,减轻接收机的计算压力,准确补偿本舰运动引起的多普勒频偏,实现对目标速度正确估计。
1 舰速补偿的原理
一般认为,目标和声呐平台以相对速度v运动时,目标回波会附加一个多普勒频移:

式中:θ为本舰速度方向与目标速度方向的夹角,c为水中声速,fc为发射信号的中心频率。
当目标静止,本舰运动时,fd其实由两部分构成:一部分是发射机运动引起的多普勒频偏,另一部分是接收机运动引起的多普勒频偏,下面分别论述。
1.1 发射机多普勒频偏
如图1所示,本舰(位置A)与目标(位置O)相距L,目标静止,本舰以速度v1运动。

图1 本舰和目标相对运动示意图(发射状态)
t=0时刻,本舰在A处发射信号,信号长度为T,信号发射结束时刻,本舰运动到位置B,信号抵达目标的起始时刻分别为t1和t2。存在如下关系:

式中:c为水中声速。信号抵达目标后的信号长度为:

因此,本舰运动,目标静止时,抵达目标处的信号因本舰运动产生多普勒频偏为:

式中:fc为原始发射信号的中心频率。
1.2 接收机多普勒频偏
如图2所示,本舰(位置A)与目标(位置O)相距L,目标静止,本舰以速度v2运动。

图2 本舰和目标相对运动示意图(接收状态)
t=0时刻,目标在O处反射本舰发射的信号(目标回波),目标回波信号长度为T',本舰接收到回波信号的起始时刻分别为t1和t2,分别处于位置B和位置C。存在如下关系:

式中:c为水中声速。本舰收到的回波信号长度为:

因此,本舰运动,目标静止时,本舰接收到的目标回波因本舰运动产生多普勒频偏为:

式中:fc'为回波信号的中心频率。
通过以上分析可知,由于本舰运动导致的多普勒频偏分为两部分,分别由发射机和接收机运动引起,并且两个频偏量并不完全相同。
当目标静止,本舰在发射和接收时相对目标分别以径向速度v1、v2运动,发射信号原始长度为T,则接收的目标回波信号长度为:

目标回波信号的多普勒频偏为:

当v1、v2近似相等,并且本舰速度远小于水中声速时,本舰运动引起的多普勒频偏才可以表示成:

式中:v是本舰发射和接收信号时相对目标运动的径向速度。
1.3 波束扫描对舰速补偿的影响
当声呐做波束扫描时,即使舰速恒定,但波束的指向不同,径向速度就不同,因此不同波束的发射信号和回波信号由于舰艇运动引起的多普勒频移也不同。舰速补偿应该将不同指向的各个波束的多普勒频移补偿为零[5],下面以圆阵为例,进行说明。
圆阵中均匀分布36个阵元,形成72个波束,圆阵阵元分布与波束编号如图3,圆阵内数字为阵元编号,箭头上数字为指向此方向的波束编号。本舰航行时,艏向α定义为舰船艏艉线的舰首方向与正北方向的夹角,航向β定义航行方向与正北方向的夹角,角度值以正北为基准顺时针方向测量。
本舰航速为v时,编号为i的波束所指向方向的速度分量为:

其中 δ=360°/72=5°,表示波束间隔,0≤i≤71。

图3 圆阵与船体相对位置示意图
发射时波束扫描和接收时形成多波束,都要根据不同的波束号和本舰航行信息,由式(11)得到各个方向的速度分量,代入式(4)和式(7)计算多普勒频偏大小,然后进行舰速补偿。
2 舰速补偿方案
2.1 发射机舰速补偿
2.1.1 插值法实现舰速补偿
主动声呐发射信号形式有多种,简单信号(如单频信号)可以实时产生发射样本,随时调节信号频率,复杂信号(如伪随机信号)不能实时产生,需要存储信号样本,调整信号频率存在困难。无论简单信号还是复杂信号,都可以由信号样本通过插值方法实现发射信号的舰速补偿。
原始发射信号s(t)长度为T,D/A转换频率为fs,采样间隔为 Ts=1/fs,信号样本为 s1(n)=s(nTs),其中 n=0,1,…,N-1,N是信号样本点数,且N=fsT。

因此,发射信号变为:

在D/A转换频率不变的前提下,信号的采样点数变为:

发射采样信号为:
其中:n=0,1,...,Ns-1。

此舰速补偿方法对于窄带和宽带信号同样适用,与信号的频率和带宽无关,只与本舰航行状态和水中声速有关。
2.1.2 插值方法选择
插值常用方法有拉格朗日插值和牛顿插值等,都具有各自优势。拉格朗日插值多项式,公式结构紧凑,在理论分析中甚为方便,但当插值节点增减(插值多项式阶次改变)时,全部插值基函数均要随之变化,需要重新计算所有插值多项式,这在实际计算中是很不方便的。由于插值多项式存在的唯一性[7],牛顿插值和拉格朗日插值有着相同的插值余项,而且插值多项式增加一次时,牛顿插值只需要再计算一个高一阶的均差,插值公式增加一项即可,计算量比拉格朗日插值节省。此外,当插值节点等距分布时,牛顿插值公式还可以大大简化,因此我们选用牛顿插值法。
牛顿插值法中,各阶向前差分定义为:

节点 xk=x0+kh(k=0,1,2...n),要计算 x0附近的 f(x)值,可令:

于是f(x)的插值结果为:
其中,本文中节点间距为h=1。
牛顿插值的阶次影响插值的效果和效率,阶次太低,插值的精度得不到保证,阶次过高,增大算法的计算量。图4是幅度为1、中心频率5 kHz、采样频率80 kHz的正弦波的1~5阶差分结果,横坐标表示插值节点,纵坐标表示幅度值。由图4可知4阶差分值已经很小,因此牛顿插值的阶数选择4阶即可满足要求。
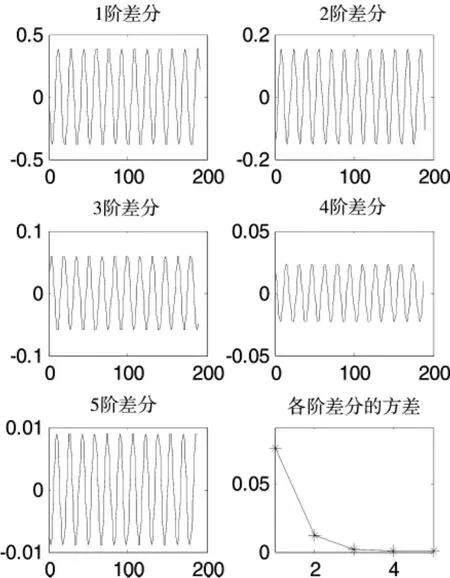
图4 正弦波各阶差分值
2.2 接收机舰速补偿
目标回波为s(t),由于本舰以径向速度v运动,接收到的信号长度改变,由式(6)可知接收信号变为:

信号为窄带时[6],解析表示为:


接收机内可以产生一个频率为fd单频信号,采用频谱搬移的方法进行舰速补偿,文献[1-3,5]对此已做了详细的阐述。
信号为宽带时,信号长度变化后,不同频率的信号分量频谱偏移不同,不能简单进行频谱搬移。可以事先将不同拉伸程度的信号样本存储,对接收信号进行多次匹配滤波,选择匹配滤波器输出的相关峰峰值最大的一次处理作为匹配滤波结果,进行后期信号处理。

图5 发射机信号源工作流程
3 发射机信号源的实现
信号源将原始信号样本存储在DSP的外存(SDRAM)中,主机将信号形式,波束扫描范围,舰艇航行信息通过CPCI总线下达给DSP,DSP根据这些命令作出响应。DSP读取SDRAM中发射信号的样本,根据所发射信号的方向和本舰航行速度、艏向、航向等信息计算出插值的参数,根据牛顿插值公式得到拉伸后的信号,经过波束形成后,发送到D/A模块进行D/A转换。当波束扫描角度覆盖多个波束时,依次对各个波束计算插值参数,得到不同方向的不同长度的发射信号,进行发射。DSP的工作流程如图5所示。
4 结论
论文分析了主动声呐因平台运动产生多普勒频偏的原因,提出应该在发射机和接收机同时进行舰速补偿的方案。文中重点阐述了对发射机进行舰速补偿的新方法,即插值法,并对插值法原理和实现做了详细说明,给出了发射机信号源进行舰速补偿的工作流程。
发射机和接收机同时进行舰速补偿符合主动声呐的工作特点,能够实时响应舰速变化。发射机使用插值法进行舰速补偿的方法简单易行,经验证取得了较好的效果。
[1]李春娟.DDS在舰速补偿中的应用[J].舰船电子对抗,2003,26(3):39-41.
[2]王华.CORDIC算法在雷达舰速补偿中的应用[J].舰船电子对抗,2008,31(3):57-60.
[3]袁鑫,曹丽丽,罗丰,等.舰载雷达中的舰速补偿研究[J].舰船科学技术,2010,32(2):48-50.
[4]朱埜.主动声呐检测信息原理[M].北京:海洋出版社,1990:106-113.
[5]彭卫华,张永伟.舰载雷达的舰速补偿[J].舰船电子对抗,2008,31(3):50-53.
[6]田坦,刘国枝,孙大军.声呐技术[M].哈尔滨:哈尔滨工程大学出版社,2000:23-24.
[7]李庆扬,王能超,易大义.数值分析[M].武汉:华中科技大学出版社,2001:14-27.
Research on Ship Speed Compensation for Active Sonar
LIU Da-li1,2,LIU Yun-tao1,CAI Hui-zhi1
(1.Institute of Acoustics,Chinese Academy of Science,Beijing 100190,China;2.Graduate University of Chinese Academy of Science,Beijing 100190,China)
In active sonar system,the velocity of target will be estimated incorrectly because of Doppler frequency shift in the echo signal,which is caused by platform moving.The reason how the Doppler frequency shift is caused is given.A method that ship speed compensation should be executed both in transmitter and receiver is presented given the characteristic of active sonar.The method can responds rapidly to the change of moving status of the ship and can compensate the Doppler frequency shift caused by ship moving accurately.A method that interpolation can be used in the signal source of transmitter to compensate the ship speed by changing the length of the transmit signal is presented also,which is proved that it can solve the problem that transmitter will cause Doppler frequency shift when ship is moving.
active sonar;ship speed compensation;signal source of transmitter;interpolation
TB565
A
1003-2029(2011)03-0059-05
2011-04-10
刘大利(1984-),男,河北保定人,博士研究生,研究方向为阵列信号处理,主动声呐信号处理。
