500 m深度拖曳系统的设计与试验
2011-01-10王岩峰易杏甫何志强郭心顺
王岩峰 ,易杏甫 ,官 晟 ,何志强,郭心顺
(1.国家海洋局第一海洋研究所,山东 青岛 266061;2.杭州应用声学研究所,浙江 杭州 310012;3.中国海洋大学,山东 青岛 266003)
500 m深度拖曳系统的设计与试验
王岩峰1,易杏甫2,官 晟1,何志强2,郭心顺3
(1.国家海洋局第一海洋研究所,山东 青岛 266061;2.杭州应用声学研究所,浙江 杭州 310012;3.中国海洋大学,山东 青岛 266003)
针对500 m波浪式拖曳系统的技术要求,介绍了拖体、流线型拖缆、电控绞车和总控程序4个关键部分的设计;根据海上的试验情况,分析了拖体的缆深比和定深拖曳等数据,表明本系统达到预期要求,可以为上层海洋学的调查与观测提供良好的平台。
拖曳系统;波浪式运动;上层海洋
高质量的现场观测数据一般都需要固定周期形式、高空间分辨率且具有一定空间层次。要收集这样长期的数据,覆盖如此大面积的海域,传统作业方式的海洋调查成本非常高。船用拖曳式多参数剖面测量技术,提供了一种卓有成效而且成本较低现场测量的途径,配合走航ADCP,可以提供上层海洋多尺度的基本要素快速观测[1]。经过近40 a的发展,目前市场上所提供的海洋拖曳式剖面测量系统能够快速、高效地完成测量任务,这在许多大型国际海洋计划中 (如GOOS、WOCE和JGOFS等)得到验证。特别是近10 a,具有波浪式拖曳功能、能携带多种学科传感器、完成多参数剖面测量的拖曳体已经成为拖曳式测量仪器的重点发展方向。而能够完成波浪式拖曳的500 m级拖曳系统由于技术研发难度大,国际上只有少数公司有该类产品,国内一直处于空白。
十一五期间“863”海洋技术领域立项研发的500 m深度拖曳系统,要求能实现高效、实时和多参数剖面同步测量,在8~500 m海深范围内做波浪式运动和定深拖曳运动。系统所集成搭载的主要传感器包括CTD、叶绿素荧光、浊度、溶解氧、pH、声速等。
1 系统总体设计
500 m级别的多参数拖曳式剖面测量系统主要由两大分系统组成,即:拖曳分系统和测量及集成分系统。拖曳分系统含拖体、拖缆、绞车、收放机械、导航和拖体姿态控制设备;测量及集成分系统含温度、盐度、深度、溶解氧、pH、叶绿素荧光、浊度和声速传感器及其采集、传输。两个系统的结合是大深度多参数拖曳式剖面测量系统的总控平台。实现波浪式拖曳或定深拖曳轨迹控制的基本技术原理为主控程序根据拖体上集成的高度计和压力信息确定拖体垂直位置,根据船用GPS确定水平位置,把此实际信息与要求的拖曳体工作轨迹进行比较,采用PID控制算法,得到最优的控制信号,提供给电机伺服系统,电机运转改变拖体控制翼的角度,产生升降动作,逐步接近设定轨迹目标,从而对拖体的运动轨迹进行修正。各种传感器在运动轨迹变化中,按照设定时序完成多参数的同步剖面测量。
为达到500 m的剖面深度并满足大多数科考船的适装性,需要保证:(1)拖体的控制翼型和展弦比选择适当,以保证提供足够的升降力;拖体整体线型要光顺,以降低阻力;(2)由于需要布放的拖缆较长,其阻力特性将直接影响系统总体性能,考虑全部采用带有导流装置的流线型拖缆;(3)绞车整体设计要求结构紧凑,占地空间小,重量轻,为此考虑采用电控绞车,并采用多层分离卷筒结构;(4)总控程序智能化,提供波浪式拖曳和定深拖曳的自动控制功能,以及传感器参数的实时显示和图形化功能。
设计加工完成的拖体如图1所示。拖体主体尺寸为1.53 m×1.84 m×0.65 m,主体线型的长宽比 6.3,宽高比 0.37,机翼采用NACA0012,尾翼分固定式和活动式,固定式尾翼有NACA翼和平板翼两种,用于平衡拖体纵倾;活动式尾翼为NACA翼,与横倾控制器一起,自动控制拖体横倾。经水动力试验测试,拖体的纵向阻力系数小于0.04;机翼的升力系数最大时达1.5(实际应用1.2),升阻比为6~10。力矩系数最大不超过0.04。
拖缆由铠装拖缆、导流套、连接片、扼制环及紧固件组成流线型拖缆(见图2)。集成方式采取分段组合,每段由一个扼制环、14片导流套、13只连接片组成。段与段之间不连续,留有一个导流套的空位,以减少漂移和防止导流套彼此间错位从而损坏导流套。

图1 500 m拖曳系统的拖体

图2 流线型拖缆
绞车结构主要由基座、固定式卷筒、分体式卷筒、排缆机构、传动链轮及链条、控制柜等组成(见图3)。绞车采用变频电机驱动,在电机尾部装有缆长仪,用于测量系统收放时的拖缆入水长度。在排缆机构下设置张力传感器,用于测量系统拖曳时的拖缆张力。控制柜可显示张力、缆长和收放速度。由实时显示的拖缆过载张力数据,能及时地向报警器提供危险信息。绞车采用3层排缆,第1层排缆的卷筒为固定式,第2层、第3层排缆的卷筒为分体式[2],绞车共排流线型拖缆850 m,电机功率20 kW,绞车的外形尺寸为1 900 mm×1 750 mm×1 560 mm,重 3 000 kg(含流线型拖缆 850 m)。

图3 三层排缆电动绞车
为保证对拖体轨迹姿态和传感器采样周期的有效控制,总控软件以1 Hz的频率访问各传感器及控制动作单元,将其测量数据取回,进行联合计算或逻辑判断。为保证系统通讯的可靠性,总控软件必须具备足够的处理速度和健壮性,在首先确保拖曳安全的前提下,尽可能提高数据可利用率。为此,总控软件的开发应用程序语言选用Dephi-6,数据存储与管理应用工具选用Microsoft Access数据库。数据库中按照时间顺序,将各传感器数据、系统参数和异常值控制等信息以合理的关联方式存储,并提供用户可选的数据初处理功能。人机交互界面则将拖体姿态及运动轨迹以实时形式显示,同时用图表的形式显示下列参数各传感器采样数据(见图4)。
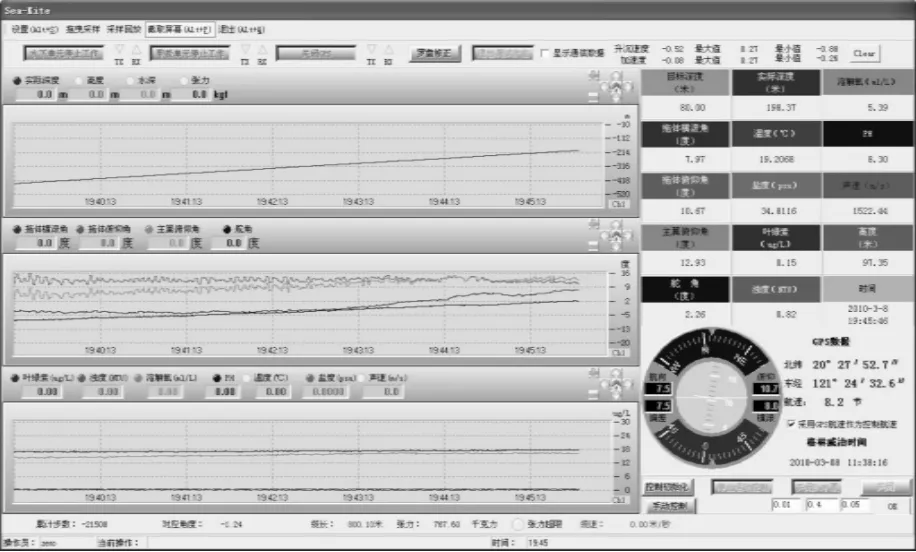
图4 拖曳系统总控程序的图形界面
拖曳系统的传感器中CTD处于拖体上方,声速传感器位于拖体前端底部,溶解氧、pH和叶绿素/浊度传感器位于主平台尾部,所有探头部分直接暴露在平台外,水交换充分,以保证测量数据的可靠。控制翼的控制机械及其配套的电机舱、驱动器舱、电子舱分别安装在拖体内部主平台的座板上下。电机装在有动/静密封功能的电机舱内。驱动器装在能静密封的驱动器舱内。信号采集传输模块、电源安装在电子舱内。另外在座板底部可通过更换不同种类的挂架而集成其它传感器,扩大拖体的使用范围。
2 现场试验

图5 2009年500 m拖曳深度工作界面截图
拖曳系统工程样机设计加工完成后,在2007年12月于浙江千岛湖开展了湖试,针对系统的不足进行了改进和完善。其后在2008—2010年先后随东方红2号船参与了5次“质量控制与规范化海上试验”共17个航段,工作和收放经历了1级海况到5级海况,系统表现稳定,达到了设计的指标要求。在2009年春季航次海况3~4级、8 kn航速下首次达到了500 m拖曳深度(见图5)。其时拖缆张力变化范围在(1 000~2 200)×9.8 N,拖体姿态横摇和纵摇均在±10°以内,保持了较好的工作状态。
2010年春季在吕宋海峡海域4~5级海况下,完成系统海试中50~400 m波浪式剖面试验,部分传感器数据随时间和深度的变化见图6。
由于流线型拖缆降阻减震的性能在试验中得以较好发挥,所以拖曳系统的缆深比始终保持在1.6~2.0之间,这对于系统的安全工作和收放效率起到了提升的作用,见表1。
拖曳系统还具备定深拖曳功能,可按照预先设定深度自动完成等深拖曳。为了提高控制质量,对经典PID的控制方法进行研究后,综合和优化出一种适用于大深度拖体升降运动的控制模型,在定深拖曳实验中得以体现,采用自动控制 模型的定深控制明显优于手动控制。
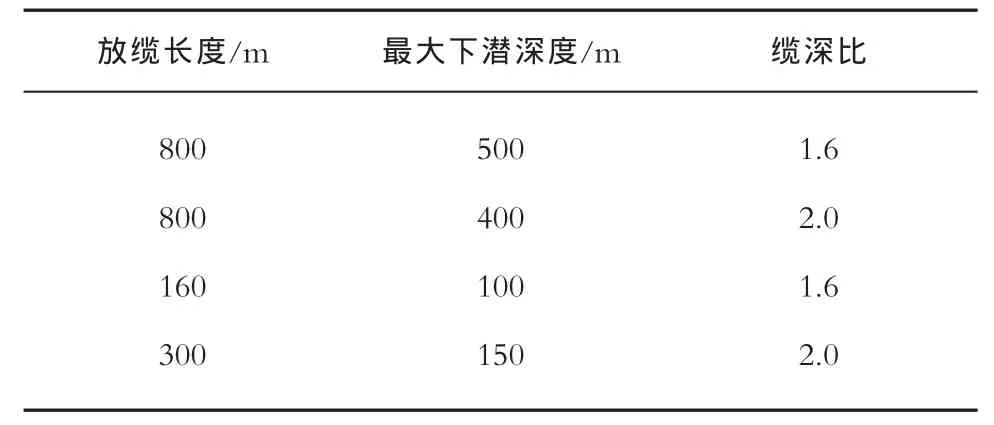
表1 500 m拖曳系统的缆深比统计表
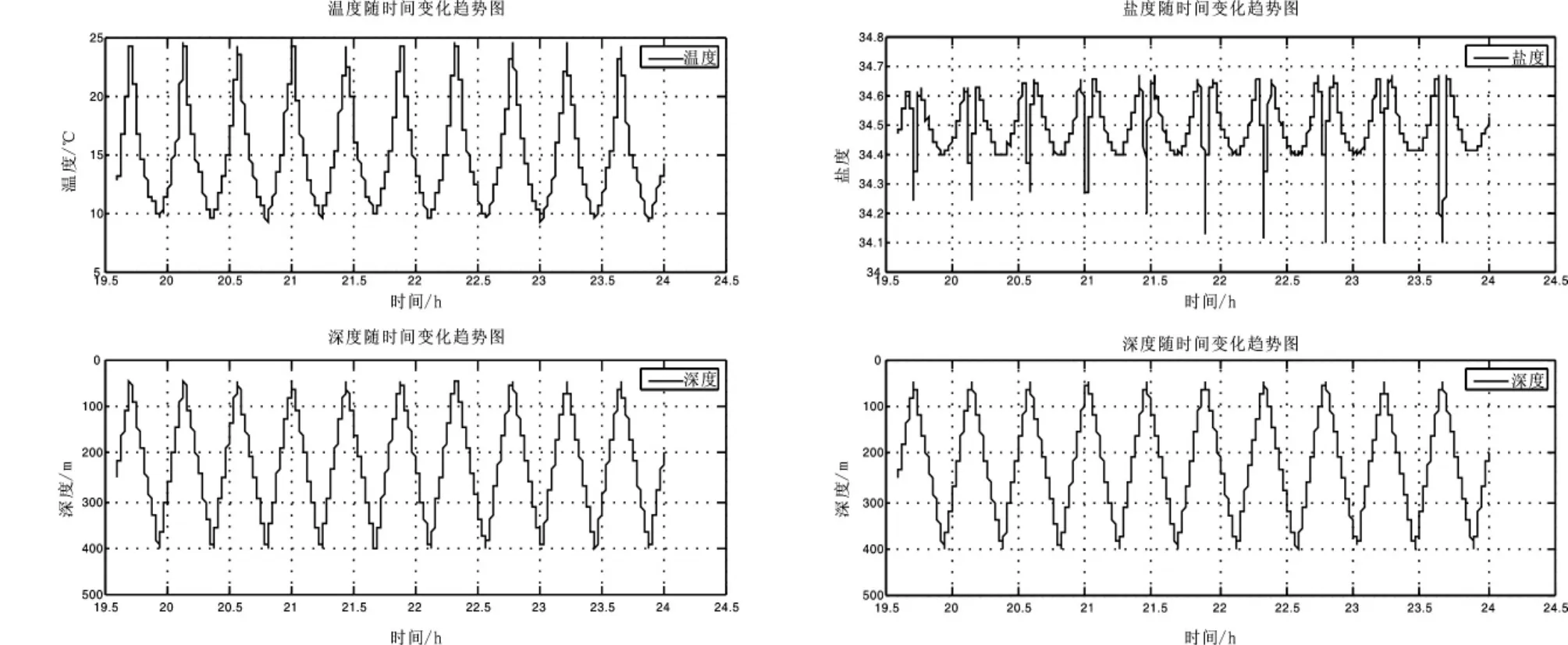
图6 400m剖面温度(左上)与盐度(右上)随深度(左下和右下)的变化
2010年3月10日进行的100 m定深拖曳试验(见图7,从上到下依次为拖曳深度、拖缆张力和船速随时间的变化),缆长为160 m和200 m(08:24之前缆长为160 m),持续 10小时18分钟。由于海况达到3级以上,船速难以稳定,改为侧风航行,航速6.5~7.5 kn,张力约为400×9.8 N。试验期间,定深均值为100.01 m,方差为0.45 m。500 m拖曳系统海试过程中的定深拖曳性能数据如表2所示。

图7 2010年春季航次100 m定深拖曳
3 分析与讨论
经过5次海上试验,所设计的500 m拖曳系统在6~12 kn的航速下达到了预期深度工作目标,其中8 kn航速下可达到500 m的剖面深度,剖面运动轨迹重复性良好,所集成的传感器传输数据正常。在2010年春季海上试验中,系统经过了连续45 h试验,期间经受5级海况,7~8级大风条件考验,整体工作正常,显示出良好的可靠性和环境适应性。系统的缆深比达到1.6~2.0,且定深拖曳方差在0.5 m以内,与国际上先进的同级别拖曳系统相当[3-4]。500 m拖曳系统的上述拖曳性能,可为上层海洋学的调查与观测提供良好的平台。
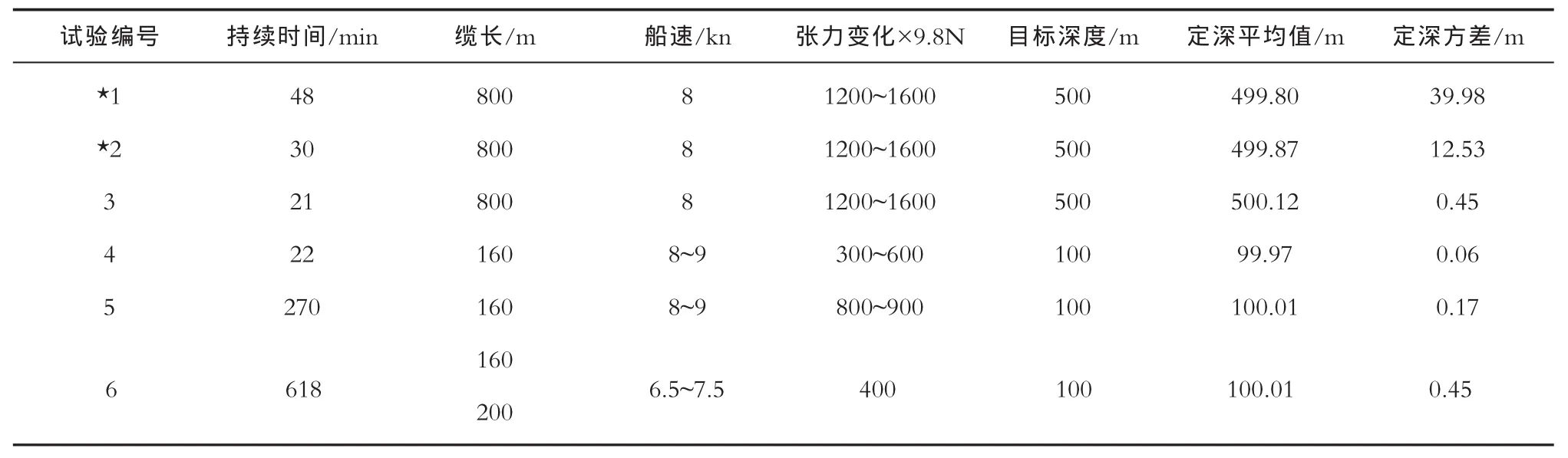
表2 500 m拖曳系统海试过程中的定深拖曳性能数据
[1]William R Young.The future of physical oceanography,50 Years of Ocean Discovery:National Science Foundation 1950-2000[M].Washington,D C:The National Academies Press,2000:165-168.
[2]何志强.拖曳式水下运载器收放系统技术研究[J].声学与电子工程,2009,1:47-49.
[3]Lindsay Pender,Ian Helmond.Seasoar Metamorphosis[C]//International Marine Technicians Workshop,1998.
[4]Daniel L Rudnick,Raffaele Ferrari.Compensation of Horizontal Temperature and Salinity Gradients in the Ocean Mixed Layer[J].SCIENCE,1999,283:526-529.
Design and Experiment of 500 m Undulating Towed Vehicle
WANG Yan-feng1,YI Xing-fu2,GUAN Sheng1,HE Zhi-qiang2,GUO Xin-shun3
(1.First Institute of Oceanography,SOA,Qingdao Shandong 266061,China;2.Hangzhou Applied Acoustics Research Institute,Hangzhou Zhejiang 310012,China;3.Ocean University of China,Qingdao Shandong 266003,China)
Aiming at the technique demands of 500m undulating towed vehicle,the key design of towed body,streamline towed cable,electric winch and flight control software are introduced.Based on the in-situ experiments,some properties of the towed system such as cable length-depth ratio and fixed-depth towing are analyzed,the results show that the system can meet the operation demands and can be used as a proper platform for upper ocean survey.
towed vehicle;undulating profiling;upper ocean
P715
B
1003-2029(2011)03-0001-04
2011-03-20
国家高技术研究发展计划(863计划)资助项目(2006AA09A307)
王岩峰(1970-),男,研究员,博士,主要研究领域为海洋观测技术。
