基于摆动导杆机构的导盲棍
2011-01-09贺礼
贺 礼
武汉大学动力与机械学院机械设计制造及其自动化系,湖北武汉 430072
基于摆动导杆机构的导盲棍
贺 礼
武汉大学动力与机械学院机械设计制造及其自动化系,湖北武汉 430072
本文针对现有的普通导盲棍没有很有效地解决盲人朋友的出行问题,而且一些高科技导盲棍由于其昂贵的价格,也很难大面积推广使用的情况。本文介绍了一种基于摆动导杆机构的导盲棍,使用者只需要简单地推着导盲棍行走,通过组合形成的5个阵列的摆动导杆机构,便能将路面凹凸情况和障碍物分布实时反馈到盲人朋友手中,实现盲人朋友对路面情况的完整掌握。
导盲棍;摆动导杆;盲人;万向轮
0 引言
众所周知,现在的盲人朋友绝大多数使用的还是原始的导盲棍——一根细长棍子。虽然已经出现了一些高科技的导盲棍,如超声波导盲棍、光电传感器导盲棍等,但是由于其昂贵的价格,很难大面积推广使用。同时,有很多地方的盲道设置不合理,盲道被占用的情况十分严重,诸多不便为盲人朋友的出行带来很多安全隐患。所以,现在盲人朋友的日常出行难题仍旧没有得到很大的改观。
针对上述盲人朋友的生活情况,本设计的目的在于提供一种价格较低实用性强的导盲棍,采用全机械结构,盲人朋友只需要简单地推着导盲棍行走,摆动导杆机构将路面凹凸情况和障碍物分布反馈到盲人朋友手中。
1 技术方案
1.1 方案结构组成
本方案由一组圆形万向轮及轮架,一组摆杆,
一个棍体外壳,一组导杆及滑块,一根中间固定杆,两个导杆环片,一个螺母和一个球形万向轮组成(如图1所示):
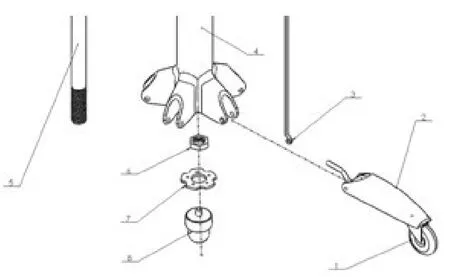
图1
1.2 具体实施方式
装配时,先将一个导杆环片7放入外壳4上部,再将中间固定杆5从该位置插入,下端伸出部分再套上另一个导杆环片7,用螺母6固定。接着把五根导杆3插入相应的环片7孔内,连接上滑块,最后安装球形万向轮8和圆形万向轮1及其轮架2。安装完成后如图2所示。
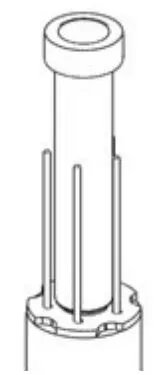
图2
使用者手握住新型机械导盲棍的上部(即图3所示部位),导盲棍的下部)自然放到地面。中间固定杆5和球形万向轮8支撑了导盲棍的全体重量,当推动导盲棍前行时,五个圆形万向轮1便可由路面的颠簸或者障碍物的阻挡,出现上下摆动或者停止前进,这时万向轮8带动导杆3上下移动,盲人便可以通过手部的触觉,感知路面的情况。

图3
2 使用效果模拟分析
不同路面情况及其导杆高度对比如下图:
图中所示情况从上到下依次是:1.通过砖块或上坡情况;2.遇到大型障碍物;3.通过沟壑或下坡。

图4
由以上3种模拟情况可知,图中的导杆与导盲棍顶部的间距d1>d2>d3,同时d2又等于导盲棍在平路上移动时的常态间距情况。分析这三种典型情况:在压过凸起障碍物或者上坡时,万向轮上翘,使导杆下移;在遇到不能翻越的障碍物时,万向轮受阻,导杆位置保持不变,但使用者明显感觉到导盲棍整体受阻力;在遇到坑陷或者下坡时,万向轮下垂,使导杆上移。所以,使用者可以根据导杆的上下移动以及整体的受力情况,可以很准确有效地推测出即将通过的相应路面的实际情况。
3 结论
本导盲棍只需要盲人简单地推着导盲棍行走,通过摆动导杆机构,将路面凹凸情况和障碍物分布实时反馈到盲人朋友手中,盲人朋友便可以推测出相应的路面情况。本导盲棍的有益效果在于:其结构稳定,造价便宜,同时操作方便,能快速自动反馈路面信息等。能在盲人的出行途中发挥巨大辅助作用。
[1]诺顿.机械设计:机器和机构综合与分析[M].北京:机械工业出版社,2003.
[2]华大年,华志宏.连杆机构设计与应用创新.北京:机械工业出版社,2008.
[3]陆钟吕.平面连杆机构分析与综合[M].哈尔滨:哈尔滨船舶工程学院出版社,1992.
[4]张有忱.机械创新设计[M].北京:清华大学出版社,2011.
TH123+.3
A
1674-6708(2011)48-0037-02
