石油管道无人值守投球系统设计
2011-01-09卢锋,姚曼
卢 锋,姚 曼
西安文理学院,陕西西安 710065
石油管道无人值守投球系统设计
卢 锋,姚 曼
西安文理学院,陕西西安 710065
本文用LM3S615为控制核心,设计了石油管道清蜡球自动投放装置,结构新颖、功能强大,试验运行稳定可靠,在数字化油田建设中具有推广价值。
自动投球机;输油管清蜡;自动控制
我国各大油田采油都是采用从油井利用单井管线输送到集油站集中处理的方式。因地面与地下温差较大,原油被抽出地面后,很快便析出大量的蜡附着在输油管内壁,时间一长就堵死输油管线,因此集油站、集中处理站等站间管线以及长输管线都需要定时投入清洗球。清洗球采用比管道管径小2mm的聚氨酯球,球投入石油管道后,在液流压力的推动下,向前移动,刮去附着在管壁上的积蜡和杂质,减少输油管道的阻力,增加流通直径。
现阶段,许多油田都采用手工投球装置,因输油管道压力大,投球时需要先关闭投球装置前后的2个阀门,泄掉投球装置段的压力后,再将清蜡球放入管线内,过程十分繁琐;加之油田油井数量庞大,油井相对距离遥远,每天仅投清蜡球方面就需要大量的人员及车辆配合。因此需要研发一种定时自动投球装置,以减少采油成本,减轻员工的劳动强度。
本文在基于LM3S615芯片的基础上,设计了石油管道无人值守投球系统,本系统结构设计合理,功能强大,操作方便,运行可靠,具有很高的推广价值。
1 系统机械结构设计
本系统的机械结构示意图如图1所示:
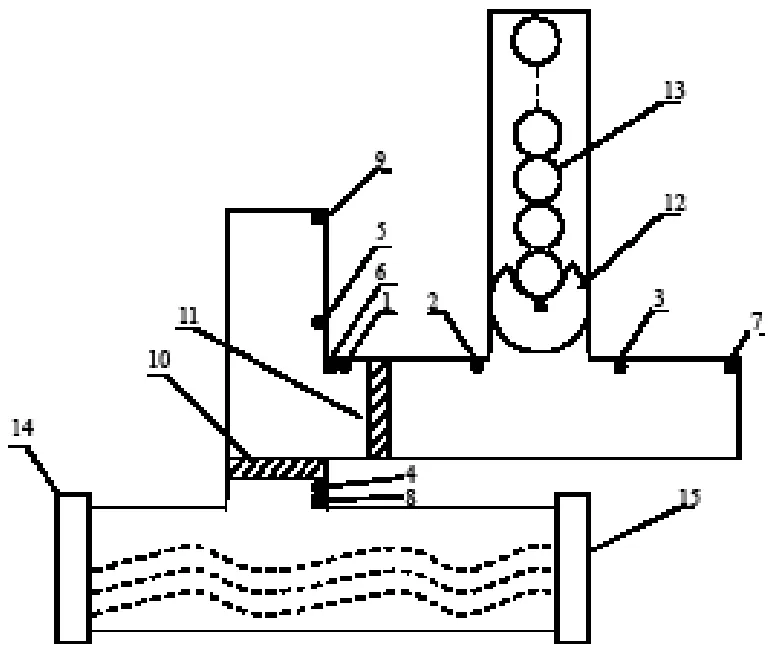
图1 投球机机械结构示意图
投球动作开始前,垂直活塞(10号)停在4号位置处,水平活塞(11号)停在1号位置处。当控制系统收到有效的投球命令后,水平活塞开始向右运动,到达3号位置后水平活塞停止,拨轮(12号)开始旋转,并将缺口内的清洗球放入水平管内,当转完一周回到起始位置后,拨轮停止动作,水平活塞由3号位置开始推动小球向左运动,到达2号位置后水平活塞停止动作,垂直活塞由4号位置开始向上运动直到5号位置停止,水平活塞接着将小球从2号位置推到1号位置,小球放入垂直管道内,最后垂直活塞从5号位置向4号位置运动,将小球压入输油管内部。6,7,8,9号是超位置检测保护开关,防止位置检测开关失效情况下,活塞运动异常导致石油外泄。
2 控制系统设计
控制部分采用LM3S615芯片,整个控制部分从功能上分为位置检测模块、电机驱动模块、键盘显示模块、电源相序检测、保护及掉电数据锁存模块、手动操作与状态显示模块等。控制系统结构框图如图2所示:

图2 控制系统结构框图
2.1 位置检测模块
这部分电路主要是由位置检测传感器和限位保护开关构成。系统在工作时,根据位置传感器的反馈信号判断活塞位置,并决策下一步的动作。为了防止外界信号干扰引起误动作,位置信号反馈回路上进行了光电隔离及整形处理,同时在软件上采用了状态机思想,在活塞运动末端加了限位保护开关。多种措施并用,确保了系统工作可靠,防止漏油事故发生。
2.2 电机驱动模块
两路活塞运动由两个三相异步电机带动,拨轮转动由单相电机带动,考虑到安装空间的限制及油田安全要求,电机驱动部分采用固态继电器。主控芯片发出的动作信号经光电隔离、放大后,送入固态继电器驱动电机动作。
2.3 键盘显示模块
本系统是无人值守型,通过键盘设置好投球间隔时间后,系统会自动运行,设定时间到达后,完成投球动作。显示窗口由六位数码管组成,前四位以倒计时的方式显示当前距下一次投球的时间,后两位显示累计已经投入的清洗球个数。键盘由五个按键组成,用于完成投球时间的设定及投球个数的清零动作。键盘显示模块由ZLG7290芯片实现,为了防止外人蓄意破坏投球参数,在软件部分加入密码保护功能。主控芯片还通过一个IO口定时给7290复位,防止键盘显示假死现象。
2.4 电源相序检测、保护及掉电数据锁存模块
考虑到工作现场环境恶劣,可能出现断电现象,在系统中增加了掉电数据锁存功能,同时还增加了三相电相序识别及三相电不平衡保护功能。三相电相序识别及保护采用RC移相叠加原理,当三相电出现异常时,比较器翻转输出信号,其中一路信号经三极管放大驱动小型继电器切断主控芯片电源,另一路信号经光电隔离后向主控芯片发出掉电中断,此时主控芯片利用电容中储存的电量,向FLASH中锁存当前系统工作状态参数。主控芯片旁边设置一个按钮,用于手动擦除FLASH中锁存状态。
2.5 手动操作与状态指示模块
为了现场安装调试的便捷,系统集成了功能选择操作面板。该面板由功能选择开关,手动投球按钮及运动状态指示灯组成。功能选择面板具有自动、手动、停车三个档位。选择自动档位时,系统按照内部设定的参数工作,定时到后自动投球;选择手动档位时,系统定时功能暂停,此时按下投球按钮,系统开始投球;停车档位主要用于紧急停车使用,当选选择这一功能时,所有动作暂停。面板上6个LED指示灯,用于对当前工作状态进行指示。
3 软件设计
软件部分主要包括主程序、键盘显示中断子程充、位置检测及状态切换子程序等,程序中使用了键盘中断、位置中断、I2C通信中断、掉电中断、定时中断及FLASH擦除中断。主程序及主要子程序流程图如图3所示。
系统上电后,首先对功能模块及各寄存器初始化,然后读取FLASH写入标志位,判断当前FLASH中有无状态写入,如有数据,则调用上次断电前保存的数据,这样可以保证程序会接着断电前的状态运行。位置检测、状态切换及参数的修改都在中断子程序中完成,主程序只循环更新显示数据。有键盘动作时,程序自动转入键盘中断,第一次进入键盘中断要验证密码,所有的修改操作限时两分钟内完成,否则系统自动退出参数修改状态。在投球过程中,随着活塞运动位置的改变会产生不同的位置中断信号,为了防止误动作造成漏洞事件发生,程序中采用了状态机原理,整个抽球过程分解为6个状态步。每次位置中断时,将当前的位置信号和上次的状态参数逻辑判断后决策下一步的动作。掉电中断程序的任务是在断电前将有效数据及时储存。为了确保数据写入时间的充足,硬件电路设计时加大了主芯片的滤波电容,同时滤波前用二极管进行了单方向隔离,但这样有可能造成主芯片误将IO管脚外电路的掉电信号当成输入信号,引起状态改变,所以在掉电中断程序中,数据存储完后关闭了所有中断源,并空循环直到将电耗完。
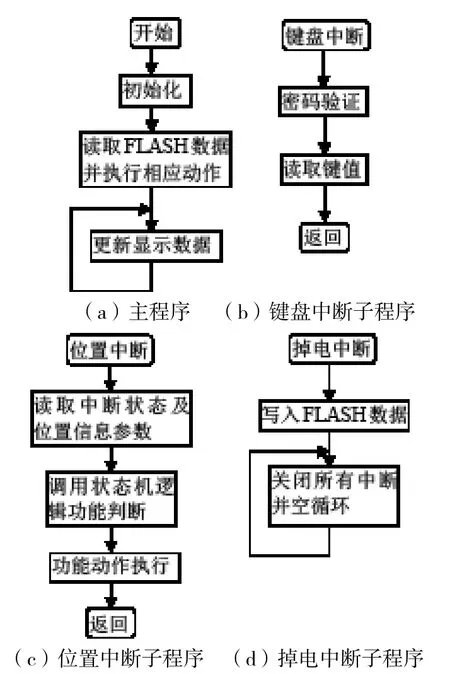
图3 程序流程图
4 结论
本文所设计的无人值守投球系统结构新颖、功能强大、运行稳定、可靠。经过现场一年多的运行,状况良好,得到用户认可,现在已正式投产使用。
[1]李玉宏.投球机的使用与选择[J].石油机械,1995,23(10):26-28.
[2]杜卫华,关荐存.用MCS-51单片机实现拨轮扶推式投球机自动投球[J].承德石油高等专科学校学报,2002,4(2):22-24.
[3]田晓霞,杜卫华,等.单片机在管道强制输球清蜡装置中的应用[J].石油矿场机械,2002,31(6):57-58.
[4]王晓东,李永生,郭亚红.定时自动清管投球装置研发及应用[J].石油化工设备,2009,38(6):77-78.
[5]LM3S615微控制器数据手册.http://www.zlgmcu.com/LUMINARY/Stellaris/lm3s615/LM3S615_ds_cn.pdf. 2008-04-16.
TE973
A
1674-6708(2011)50-0181-02
卢锋,硕士研究生,专业:检测技术与自动化装置,主要从事自动化相关专业教学及科研工作
姚曼,在读硕士,专业:电子与通信工程,主要从事通信相关专业教学及科研工作
