甘草移栽机的设计与运动分析
2011-01-06韦利波王维新
韦利波,王维新,闫 琴
(1石河子大学水利建筑工程学院,石河子,832003;2石河子大学教务处,石河子,832003)
甘草移栽机的设计与运动分析
韦利波,王维新2,闫 琴1
(1石河子大学水利建筑工程学院,石河子,832003;2石河子大学教务处,石河子,832003)
栽植机械是甘草育苗移栽技术应用、推广的瓶颈,结合甘草移栽的农艺要求,本文设计出一种平移式甘草移栽机,该机采用自动分苗机构和自动移栽机构,可解决分苗、栽苗的难题,并对其工作过程进行了运动分析,确定了自动移栽机构的主动轮和两个从动轮的最佳位置关系,优化了结构参数。
育苗移栽;甘草移栽机;自动分苗机构;自动移栽机构
甘草是新疆特有的经济作物,在各行业中广泛应用,野生甘草已不能满足市场需求,必须逐步推广机械化育苗移植技术,而栽植机械化是关键环节。近年来国内外已研发出多种类型移栽机械,但主要以半自动为主,且品种单一、结构复杂、成本高、农机和农艺脱节、不能保证移栽质量。甘草根细、软,还带有须根,相互纠缠,不易分开,在甘草移栽过程中,若采用人工分苗,劳动强度大且不安全。目前,国内的甘草移栽机存在一些问题,如自动分苗机构不可靠,出现多分苗或漏分苗;甘草根移栽株距小,出现移栽不均匀。
本文结合甘草移栽的农艺特点,设计出一种平移式甘草移栽机,采用输苗带式自动分苗机构和链夹式自动移栽机构,解决了自动分苗、送苗、栽苗的关键问题,并对秧夹在链带中的工作过程进行了运动分析,确定了移栽机构的主动轮和两个从动轮的最佳位置角度,为样机的优化设计提供了理论依据。
1 移栽机的结构及工作原理
1.1 移栽机的结构及工作原理
移栽机的结构如图1所示。由机架、自动分苗机构、开沟器、自动移栽机构、传动系统、覆土器、镇压轮等部分组成,能一次完成开沟、自动分苗、送苗、栽苗及覆土、镇压等作业。
工作时,拖拉机牵引移栽机前进作业,动力由地轮传入,经链轮传动系统带动自动分苗机构和自动移栽机构。自动分苗机构的导向轮转动,带动输苗带运动,输苗带里的甘草根按一定间距有序地滚出,落入移栽机构的秧夹中。秧夹进入滑道、闭合,夹持着甘草根随链轮移动。移动到与地面平行的两链轮之间时,秧夹脱离滑道,在弹簧弹力作用下自动张开,甘草根落入开沟器开好的沟内,被开沟器两侧的回土掩埋,保持水平铺放。然后,由覆土镇压轮继续覆土并埋实。

图1 甘草移栽机结构示意图Fig.1 Schematic drawing on structure of licorice transplanter
1.2 移栽机主要部件的组成及工作原理
1.2.1 自动分苗机构的组成和工作原理
自动分苗机构由导向轮、导向链轮、输苗带、输苗带收集器等组成,如图2所示。
机构的输苗带由帆布带和泡沫块制成,泡沫块在帆布带里按一定间隔固定,两相邻泡沫块之间形成宽度为5 c m的苗槽。人工将甘草根排列在输苗带里,卷成柱状,使根与根之间不会缠绕。当导向轮转动时,输苗带上的小孔带动输苗带使甘草根有序地滚出,滚出的输苗带落入导向轮下方的输苗带收集器中。导向轮能保证输苗带运动过程中速度不变,控制甘草根落出的速度与秧夹的速度一致,准确地落入秧夹中。

图2 自动分苗机构Fig.2 Automatic dividing seed mechanism
1.2.2 移栽机构的组成和工作原理
移栽机构是甘草移栽机的核心机构。自动移栽机构由链轮、秧夹、导向滑道三部分组成,如图3所示。
该机构的秧夹由固定秧夹柄和活动秧夹柄铰接,两夹柄之间有一弹簧。秧夹头铆有橡胶块,且粘有泡沫,保证夹持秧苗稳定,既不伤苗,也不滑脱。秧夹平时呈张开状态,当甘草根落到秧夹上,秧夹进入滑道,弹簧被压缩,秧夹闭合,夹持着甘草根向下移动。当甘草根到达主动轮时转向,水平向后移动。到主动轮和从动轮1之间时,秧夹脱离滑道,靠弹簧的弹性自动打开,甘草根水平落入沟中,平行且株距均匀地铺放于倒梯形沟内。采用三角形、链夹式自动移栽机构可保证秧夹自上而下平移送苗,时间充裕;栽苗区段水平,甘草根进入栽植点以前始终平行沟底运动,落入沟中时能保持垂直状态及绝对零速状态,相对地面为静止状态,有利于覆土压实工作。
加大监管力度,规范生产经营行为。濮阳市局扎实推进执法监管“一制两化”(即落实监管责任制,推进执法监管规范化、法治化),实行网格化、痕迹化监管,着力提升执法监管水平。注重加强行刑衔接,成立了行刑衔接工作领导小组,健全了联席会议、案件备案回复和案件复查等工作机制。
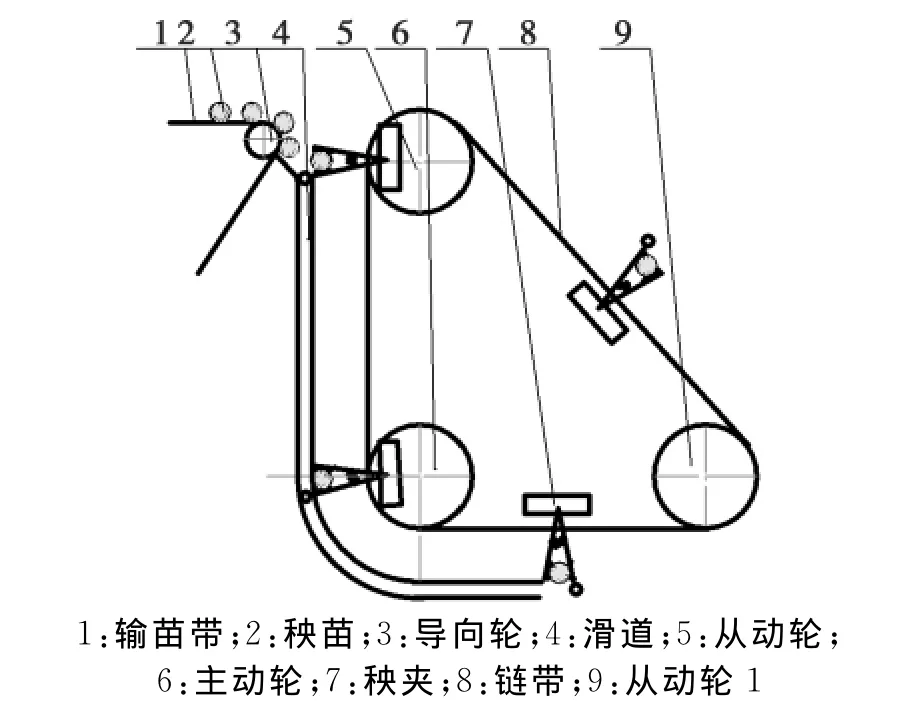
图3 自动移栽机构Fig.3 Automatic transplanting mechanism
2 栽植过程的运动分析
在移栽过程中,甘草移栽机的秧夹夹持着甘草根的运动,一方面相对移栽机与链带一同运动(相对运动),同时随移栽机一起作水平直线运动(牵连运动)。甘草根从落到秧夹中到着地可分为以下几个过程(图4):
(1)从甘草根落到秧夹上A0点到主动轮的A点;
(2)由A点到主动轮的B点;
(3)由B点到从动轮1的C点;
(4)由C点到从动轮1的D点;
(5)由D点到从动轮2的E点;

图4 运动分析图Fig.4 Drawing of motion analysis
2.1 甘草根栽植过程运动分析
假设机器的前进速度vz和秧夹旋转角速度ω(链带线速度vp=Rω,ø=ωt),则秧夹的运动轨迹与半径R、速度vp和vz有关。秧夹的运动方程为:

2.2 参数优化
甘草根细且轻,为了使其水平地栽入沟中,且株距和栽植深度均匀,设计时必须遵循“零速移栽”原理。即vmin=vz-vp=0,甘草根的绝对速度等于零,则vz=vp。当秧夹脱离滑道松开甘草根时,秧夹的水平分速度应接近于移栽机的前进速度,且与前进方向相反。
保持零速的时间t0为,其中:S0是水平 栽植区段长度;vz为机器的前进速度。由上式可知,延长零速栽植时间t0的方法有二个,一是改变秧夹的运动轨迹,加长水平栽植区段的长度S0;另一个是降低移栽机的作业速度vz。前者主要根据秧夹松脱秧苗的时间与覆土镇压部件的协调关系来决定,但也不能太长而破坏机具的紧凑性;后者则会影响移栽机的生产效率。
由于链夹上各秧夹在主动链轮的传动下循环往复运动,因此,速度图和位移图都应为封闭曲线,于是有:S1+S2+S3+S4+S5+S6=0,化简得到:(1 + tan2=2 ,从而确定出两个从动轮与主动轮的最佳位置角度α=51.83°。因为tanα,故根据α角可确定出H、S0(H 为A0点到主动轮A点的垂直距离)。
3 结语
1)本文设计的甘草移栽机能一次完成开沟、自动分苗、送苗、栽苗及覆土、镇压等作业,效率高,操作简单。自动分苗机构可以减轻人工分苗的劳动强度,也可以保证移栽不漏苗、不多苗。链夹式自动移栽机构可保证垂直平移送苗,水平栽苗,甘草根落入沟中时能保持垂直状态及绝对零速状态,移栽均匀。
2)通过分析秧夹夹持着甘草根在移栽过程中的运动,得出甘草根的速度、位移变化规律,确定了两个从动轮与主动轮的最佳位置角度α=51.83°。
[1]郭满平.甘草育苗移栽技术[J].甘肃农业科技,2005,6(4):52.
[2]吴邦平,肖丽新.甘草铺苗机[J].新疆农机化,2003(5):50.
[3]王玉梅,李冬梅.甘草栽植机的研究[J].农机使用与维修,2003(2):9.
[4]刘磊,陈永成,毕新胜,等.吊篮式移栽机栽植器运动参数的研究[J].石河子大学学报:自然科学版,2008,26(4):504-506.
[5]李建桥,张国凤.钵苗有序移栽机构的研究进展及应用展望[J].农机化研究,2008(2):1-5.
[6]董锋,耿端阳,等.带式喂入钵苗栽植机研究[J].农业机械学报,2000,31(2):15-18.
[7]刘洋,李亚雄,赵华伟,等.吊篮式移栽机双工位喂苗机构的设计[J].石河子大学学报:自然科学版,2010,28(5):628-630.
[8]李宝筏.农业机械学[M].北京:中国农业出版社,2003:51-67.
Design and Motion Analysis of the Licorice Transplanter
WEI Libo1,WANG Weixin2,YAN Qin1
(1 College of Water Conservancy & Architectural Engineering,Shihezi 832003,China;2 Office of Education Ad ministration,Shihezi University,Shihezi 832003,China)
Transplanting mechanism is important in the popularization and application of the seedling transplanting technique in licorice.It is significant to design a new type of licorice transplanter combined with the agriculture technique of transplanting licorice seedling that has the advantages of good f unction and simple structure.In this paper,the even-move type of licorice transplanter was designed,adopting automatic dividing seed mechanism and automatic transplanting mechanism to solve baffling problems of dividing seed cultivating seed.Through theoretical analysis on the motion of seedling,the optimal position relationship bet ween initiative chain wheel and t wo passive chain wheels was obtained,optimizing structure parameter.
seedling transplanting;licorice transplanter;automatic dividing seed mechanis m;automatic transplanting mechanism
S223.9
A
1007-7383(2011)03-0367-03
2010-01-16
韦利波(1973-),女,讲师,硕士,从事力学研究;e-mail:wlb730702@shzu.edu.cn。
王维新(1958-),男,教授,从事农业机械化研究;e-mail:wwx-ma@shzu.edu.cn。
