可控偏心器定位总成双向液压控制系统的建模和分析*
2011-01-05何忠盛
何忠盛
(中国石油测井有限公司吐哈事业部 新疆鄯善)
可控偏心器定位总成双向液压控制系统的建模和分析*
何忠盛
(中国石油测井有限公司吐哈事业部 新疆鄯善)
在旋转导向可控偏心器中,定位总成是整个系统的核心部件。为了方便地研究定位总成的双向液压控制系统,文章介绍通过对其进行建模和分析,得到理论计算结果;并且与实际情况进行对比,得出了这套建模的有效性结论。
定位总成;建模;传递函数;双向液压控制系统
0 引 言
西安石油大学井下测控研究所已经研制出的Ⅰ型、Ⅱ型可控偏心器XTCS样机的定位总成,只能控制翼肋的伸出,也就是只能实现位移的单向控制,在泥浆泵工作时翼肋无法收回,在停泵时才能收回翼肋。如果需要进行位移合矢量的重新调整,必须关泵将翼肋完全收回,重新进行调整。这种控制方案,不能实现位移的真正闭环调节与控制,增加了钻井工具的使用难度。针对该问题在Ⅲ型可控偏心器的研制方案中进行改进提出井下控制系统采用双向控制方案,能够在不停泵的情况下,实现对偏心位移矢量的双向控制,此方案将可以减少关泵次数,大大提高钻井效率[1]。
1 定位总成双向液压控制系统的构成
定位总成是一套液压定位控制系统,它由机械、液压和电气三部分构成,系统原理如图1所示。机械部分包括隔离膜、定位缸、平衡囊、单向阀和工作密封腔,电气部分包括电磁阀、位移传感器、压力传感器和微控制单元。机械的微控制单元是一块采集存储和电磁阀控制电路,可以实现压力传感器、位移传感器数据的测量和电磁阀开关状态的控制。定位总成的核心部件是电磁阀和定位活塞缸,驱动三个翼肋的定位总成的结构是相同的[2]。
2 定位总成双向液压控制系统的数学模型
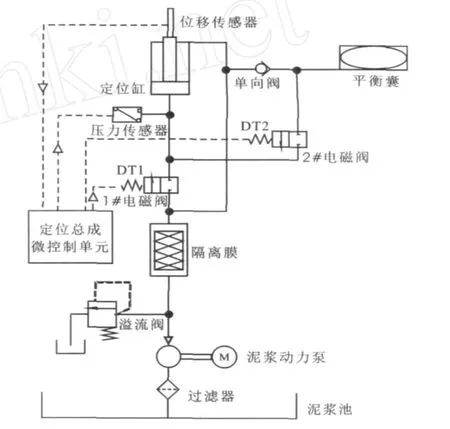
图1 定位总成系统原理图
在实际的钻井过程中系统的驱动压力由泥浆动力提供,电磁阀的开阀时间是预先设定的钻井工作参数,在驱动压力发生变化的过程中电磁阀开阀时间保持不变。为了能够更好的分析系统的性能,先对系统输出影响较大的电磁阀和定位缸进行建模,然后再建立双向控制系统的模型,如图2所示。
可控偏心器的定位控制系统主要由控制器、电磁阀和定位缸组成,整个的液压系统与我们的电气单元通过执行元件(或称机电转换元件,即电磁阀)和反馈测量元件(位移传感器)有机的结合,组成了一个完整的闭环液压控制系统[3]。
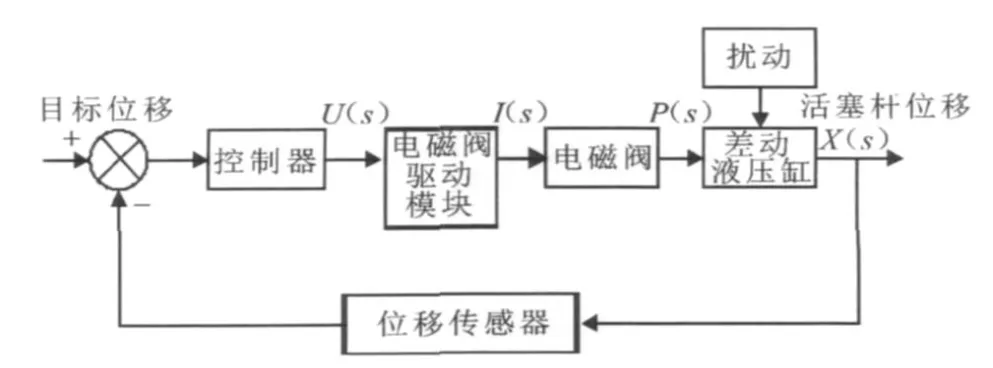
图2 控制系统闭环模型
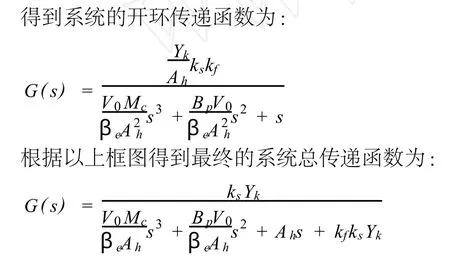
要建立该整个液压控制系统的数学模型就有必要对这套液压控制系统的每一个环节给予适当的数学描述,即传递函数的建立,如图2所示,然后应用理论知识将所有环节的传递函数通过推导与组合,最终合并成为一个总的描述整个系统的传递函数,这样我们就可以对它运用控制理论进行特性分析与系统评估。
转换后的传递函数(简化后)如图3所示。
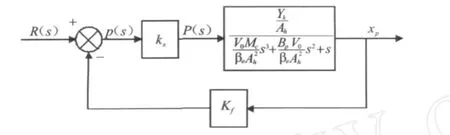
图3 液压控制系统传递函数框图
3 求解具体的传递函数数值
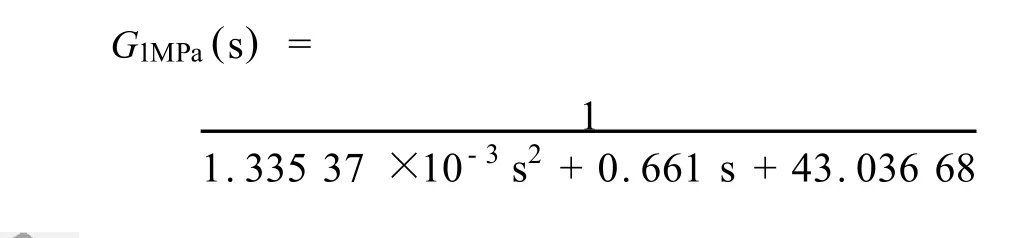
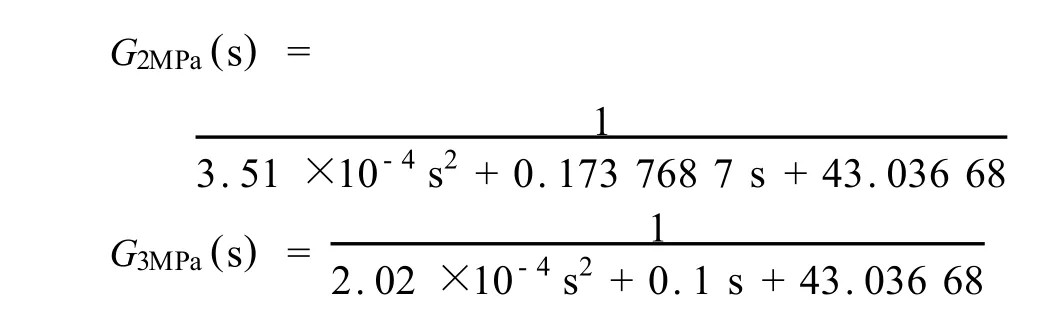
经过查找和计算,得到以下参数[4]:
控制腔活塞截面积:Ah=3.14×10-4m2;初始油腔体积:V0=1.273 3×10-5m3;活塞及负载折算质量:Mc=1.056 78×10-3kg;油液的等效弹性系数为:取经验值为βe=700 MPa;其粘性阻尼系数Bp=1.095×104kg/s;位移-电压转换系数 kf=43.036 68 v/m;比例环节的比例系数 ks=106。Yk为电磁阀随开阀时间不同的比例系数:代入数值后由于三阶的系数非常小,因此我们忽略掉三阶因素对系统的影响,最终可以近似为二阶振荡环节,化简后得到系统的传递函数具体数值:
4 数值分析
对以上三个不同参数下的传递函数进行动态分析,求它们的阶跃响应,如图4、5、6所示。
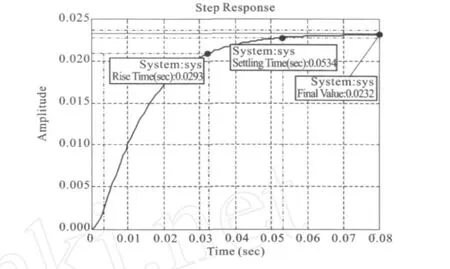
图4 供给压力1 MPa的传递函数的阶跃响应
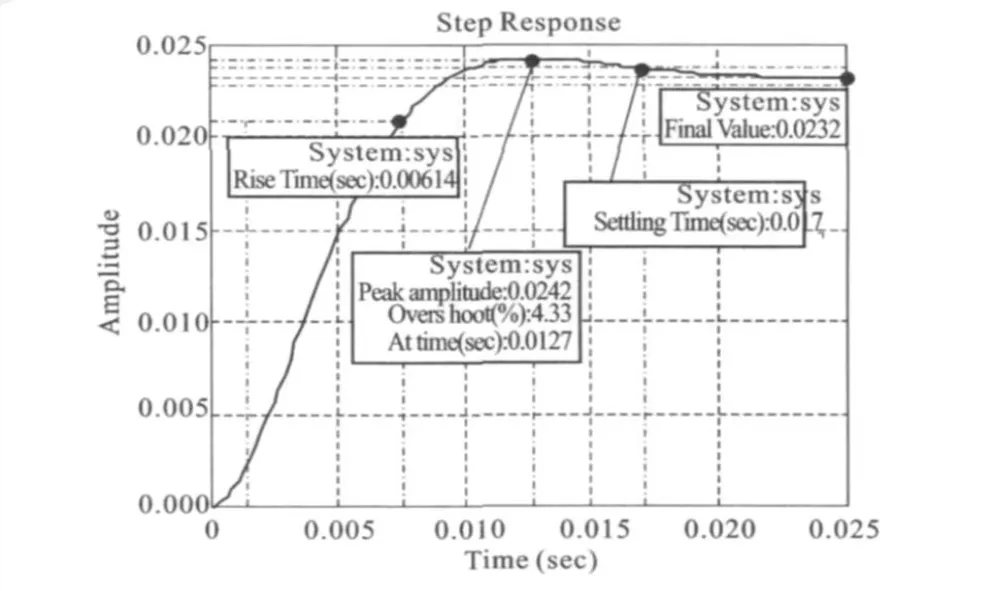
图5 供给压力2 MPa的传递函数的阶跃响应
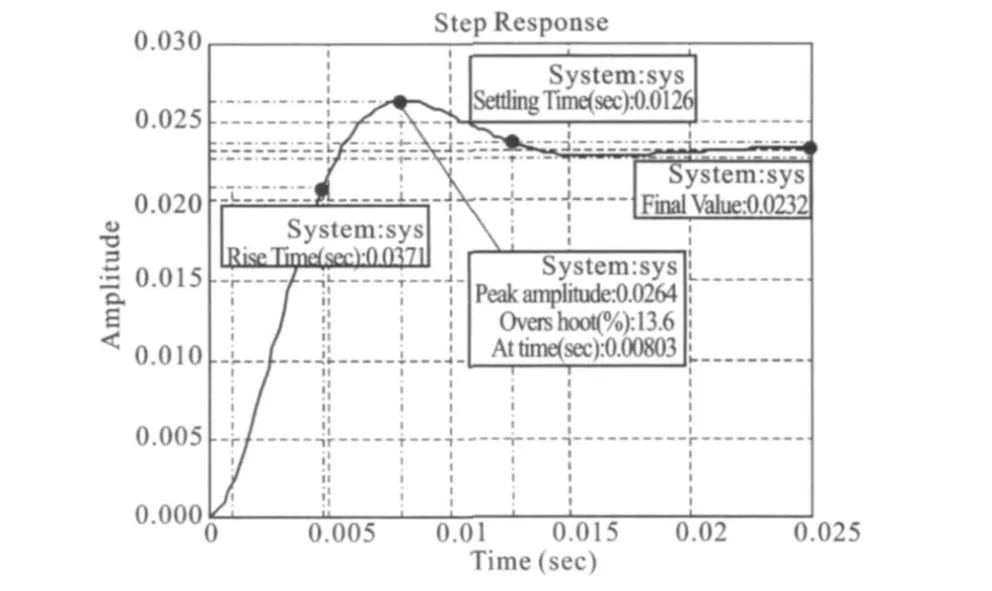
图6 供给压力3 MPa的传递函数的阶跃响应
传递函数的阶跃响应在2 MPa时就已经出现了4.33%的超调量,而实际位移控制曲线在2 MPa时,并未出现超调现象,这是因为在闭环的比较环节中设定了一个容差带(的量化台阶容差带,约为),针对2 MPa的实际位移控制曲线,这个容差带为[49.814 mm,50.186 mm],当某一次开阀执行后,位移刚好进入这个带中,CPU即认为调整到目标位移值,整个系统停止位移调整,只要系统的密封性良好,位移不受扰动,位移就一直保持下去,从而在一定程度上避免了超调量的产生。
5 结束语
通过理论与实际的对比分析,我们发现通过理论建立的传递函数在发生变化时,理论上阶跃响应的变化趋势和实际设置对应的供给压力参数测得的位移曲线有很好的一致性,这就从很大程度上证明我们建立的这套液压控制系统传递函数的有效性。
[1] 姚文彬.电机-泵动力可控偏心器可控性和稳定性研究[D].西安:西安石油大学,2006
[2] 李安编.电机泵动力可控偏心器控制研究报告[R].西安:CNPC井下测控重点研究室内部资料,2004
[3] 张晋凯.泥浆动力导向工具贴井壁力的双向控制系统研究[D].西安:西安石油大学,2007
[4] 成大先.机械设计手册[M].北京:化学工业出版社,2002
Modeling and analyzing of a two-way hydraulic system of the positioning assembly of controlled eccentric.
He Zhongsheng.
The positioning assembly is a core component of the rotation controllable eccentric.To facilitate of study the twoway hydraulic control system of positioning assembly,this paper acquires theoretical results through modeling and analysis of the two-way hydraulic system of the positioning assembly of controlled eccentric.Compared with the actual situation,the conclusions is that this modeling is effective.
positioning assembly;modeling;transfer function;two-way hydraulic control system
P631.8+1
B
1004-9134(2011)06-0014-02
国家高科技研究发展计划(“863”计划)项目“旋转导向可控偏心器工程化技术研究”(编号:2007AA090801-01)和国家科技重大专项课题“多枝导流适度出砂技术”项目子课题“电机泵动力旋转导向钻井工具及配套技术研究”(编号:2008ZX05024-003-05)
何忠盛,男,1965年生,工程师,1988年毕业于西安石油大学,现在中国石油测井有限公司吐哈事业部仪修中心工作。邮编:838202
2011-05-21
高红霞)
PI,2011,25(6):14~15,18
·方法研究·