基于Solid Works与ANSYS的机器鱼壳体有限元分析
2011-01-05牛健文王卫兵晁贯良
牛健文,王卫兵,晁贯良
基于Solid Works与ANSYS的机器鱼壳体有限元分析
牛健文,王卫兵,晁贯良
(石河子大学机械电气工程学院,石河子832003)
本文对机器鱼壳体进行三维建模,并用有限元结构性能分析的方法模拟并获取了机器鱼壳体在不同水深的应力分布数据,得到了壳体在不同水深下的变形结果,从而计算出壳体满足强度要求的最大水深,为进一步探讨机器鱼的结构强度和优化设计提供了支撑。
机器鱼;Solid Works;ANSYS;应力分析
水下机器人在海洋石油开发、矿藏调查、打捞作业等领域具有广阔的应用前景[1-2]。随着人类对鱼类游动机理认识的不断深入以及计算、控制、传感、材料等相关技术的发展,越来越多的科研工作者展开了仿生机器鱼的研究,希望能够实现集高效、灵活和隐形于一体的新型水下机器人[3-4]。
由于水下环境的复杂性和不确定性,以及机器鱼运动的特殊性,为确保机器鱼的安全性,机器鱼的壳体必须具有足够的强度。本文从应力的角度,采用有限分析的方法,研究机器鱼壳体在水中不同深度的变形,对其进行力学分析和校核,为机器鱼的优化设计提供依据。
1 有限元分析软件ANSYS
ANSYS软件是一个功能强大的有限元计算分析软件包,它可运行于PC、NT工作站、UNIX工作站以及巨型计算机等各类计算机及操作系统中,其数据文件在其所有的产品系列和工作平台上均兼容。它具有功能强大的建模工具,但与多种先进的CAD软件相比较,要弱得多,尤其对于复杂的模型,修改起来很困难。
ANSYS软件可与多种先进的CAD,如Pro/E、UG、Solid Wor ks、Auto CAD等软件共享数据。利用ANSYS的数据接口,可以精确地将在CAD系统下生成的几何模型数据传输到ANSYS,并通过必要的修补准确地在模型上划分网格并进行求解,这样就可以省去了在ANSYS软件中复杂的建模过程,大大降低分析人员的劳动强度,可以使其从繁重的几何建模工作中脱离出来,而把更多的精力用于提高有限元模型精度、研究分析方法等上来,使设计人员的工作效率大幅度提高[5-6]。
2 机器鱼壳体模型的CAE模型建立[7-9]
2.1 机器鱼壳体CAD模型的建立
ANSYS的三维建模能力较弱,但ANSYS提供了数据接口程序,使得在其它3D软件中建立的模型能很方便地导入ANSYS中。因此,本文选择在建模功能强大的Solid Works软件中进行三维建模,然后再通过Solid Wor ks和ANSYS的数据接口,解决ANSYS建模困难的问题。
为确保导入ANSYS后模型能正确有效,用Solid Works在建模的时候需要注意三点:1)在建模时,要保持实体特征的独立性,要求在创建实体特征时不能合并实体;2)在模型特征中,删除掉螺纹、尖角以及对模型结构影响不大的倒圆角等特征;3)若是装配体模型导入ANSYS,在导入之前一定要做干涉检查,保证各零件模型之间不能有干涉。
将Solid Wor ks创建的模型导入ANSYS中,一般有以下3种方式:1)在Solid Wor ks中另存为IGES文件,在ANSYS中依次点击Utility Menu-File-I mport-IGES…导入模型;2)在Solid Wor ks中另存为SAT格式,在ANSYS中通过SAT…导入模型;3)在Solid Wor ks中另存为x.t文件,在ANSYS中通过PARA…导入模型。
考虑到用IGES格式导入后丢失的数据比较多,本文采用第3种方法。从Solid Wor ks导入ANSYS后的机器鱼壳体模型如图1a所示;然后依次点击Plot Ctrls-Style-Solid Model Facets然后选Nor mal Faceting;鼠标右键选择Repl ot重生,即可看到实体,如图1b所示。

图1 壳体模型Fig.1 The model of the shell
2.2 材料参数
由于水下环境的复杂性,为确保机器鱼的安全性,机器鱼的壳体必须具有足够的强度。本文选用LY12材料制作机器鱼的壳体。LY12是一种高强度硬铝,可进行热处理强化,点焊焊接性良好;因为本身的抗蚀性不高,所以采用阳极氧化处理与涂漆方法以提高其抗腐蚀能力。经淬火,在自然时效状态下LY12材料的弹性模量E=73 GPa,密度ρ=2780 kg/m3,抗拉强度=470 MPa,屈服强度σ0.2=325 MPa,泊松比μ=0.3。[10]
2.3 网格划分
ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。越复杂的模型导入后问题越多,随着倒角、孔、曲面的增加,模型越不规则,导入后越乱,所以为了顺利划分网格,本文对机器鱼的结构做了相应的简化。
1)定义单元类型。ANSYS12.0提供了200余种单元用于工程分析,文中网格类型选用八节点六面体实体单元SOLID45(图2),其适用于实体三维结构模型的分析,单元通过8个节点来定义,每个节点有3个沿着xyz方向平移的自由度,可用于分析大变形、大应变、塑性以及屈曲等问题。

图2 SOLID45单元Fig.2 SOLID45 element
2)网格密度控制。ANSYS程序提供了使用便捷、高质量的对几何模型进行网格划分的功能,主要包括智能网格划分、映射网格划分、延伸网格划分和自适应网格划分4种网格划分方法。本文采用智能网格划分,在划分网格之前,在ANSYS中利用布尔操作将模型切分成12部分,为了划分出高质量的网格。网格的元素边长度设置为0.05,利用体扫掠生成网格,就是从体上一边界面的网格扫掠贯穿整个尚未划分单元的体模型来生成有限元模型。执行网格划分,得单元总数为2407个,节点总数为4956个。
机器鱼壳体网格划分结果如图3所示。
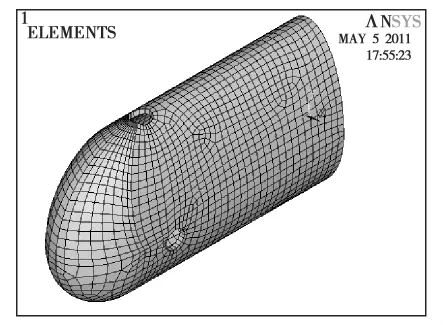
图3 壳体有限元网格划分图Fig.3 Finite element model of shell
2.4 载荷的施加
选择一个虚拟非均布载荷,在竖直方向机器鱼受到水的压力是不同的,在此做简化处理:为便于对机器鱼壳体进行力学分析和校核,认为机器鱼壳体在水中受均布载荷。机器鱼在不同的水深之处,受到的压力是不一样的,根据公式P=ρgh(ρ为水的密度,g为重力加速度,h为机器鱼所在的深度),当h变化时,机器鱼受到的载荷也将随之变化。在此先取h=10 m,可得P=98 k Pa,载荷的方向均垂直指向壳体的表面。
2.5 边界条件
机器鱼头部与尾部相接的部位由一块较厚的铝板连接在一起。因为这块较厚的铝板所能承受的力要远大于机器鱼的壳体,所以在此通过简化,直接使头部与尾部相接的整个面完全约束,如图4所示。

图4 机器鱼壳体约束及载荷施加后图形Fig.4 The map after imposing restraint and load of press robotic fish shell
3 力学分析与强度校核
3.1 力学分析
当取水深为10 m时,通过ANSYS软件分析,得出了一系列相应的位移、应力图,如图5~图8所示。
由图5和图6可知:壳体的最大变形位移为7.81 E-05 m;由图7图8可知:单元等效最大应力和节点等效最大应力分别为25.8 MPa和24.2 MPa。

图5 变形形状和未变形轮廓图(h=10 m)Fig.5 Defor mation shapes and undefor med contour map(h=10 m
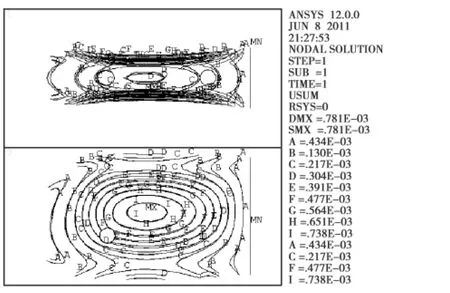
图6 总位移等值线图(h=10 m)Fig.6 Total displacement contour map(h=10m)
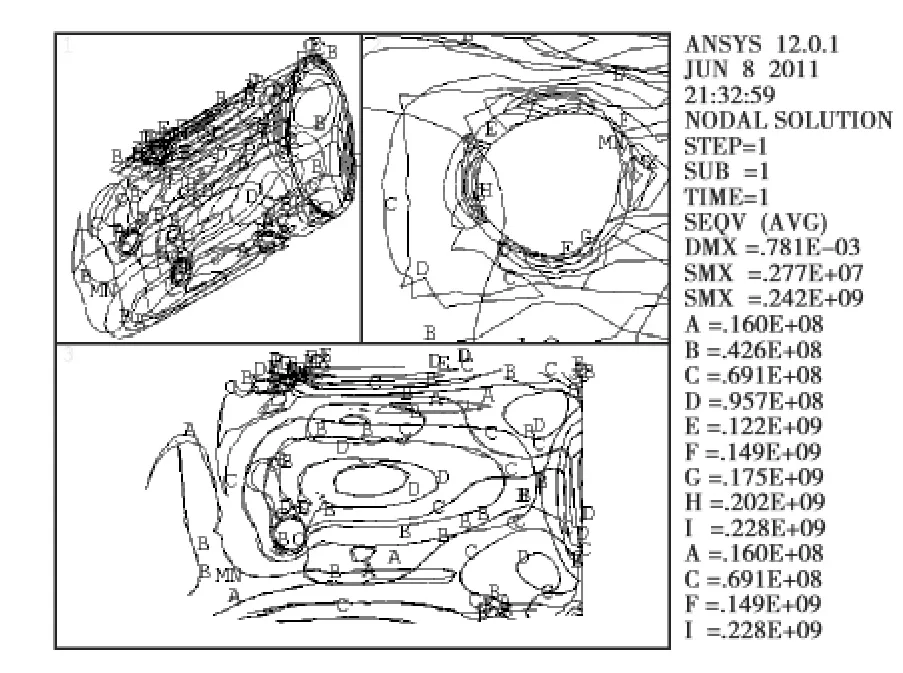
图7 节点等效应力等值线图(h=10 m)Fig.7 The node of equivalent stress contour map(h=10 m)
3.2 力学强度校核
目前一般机械制造中,在静载荷的情况下,对塑性材料的安全因数可取ns=1.2~2.5。因为LY12为塑性材料,并且机器鱼在水底下是运动的,在这里只研究它静止时的受力情况,所以在本文中取ns=2.2。对没有明显屈服极限的塑性材料,可以将产生0.2%塑性应变时的应力作为屈服指标,所以

碳钢、铜、铝等塑性材料,通常以屈服的形式实效,宜采用最大切应力理论(第三强度理论)和畸变能密度理论(第四强度理论)来校核[7]。


图8 单元等效应力等值线图(h=10m)Fig.8 The element of equivalent stress contour map(h=10 m)
进入ANSYS的通用后处理器模块中,单击Nodal Sol ution命令,打开节点应力输出表,找到最大等效应力点为4519。该节点的主应力为σ1=-2.1748 MPa,σ2=-3.6230 MPa,σ3=-27.039 MPa。由式(1)和(2)可得:

所以,机器鱼壳体满足第三和第四强度理论的强度条件,说明机器鱼在水深10 m处的时候,壳体足够安全。
根据上述计算结果,再次通过ANSYS软件进行分析。在分别选取水深为54 m和61 m的情况下,利用上述公式进行验证校核。加载和约束的方法同上,并得出相应的应力图,如图9~图12所示。

图9 节点等效应力等值线图(h=54 m)Fig.9 The node of equivalent stress contour map(h=54 m)

图10 节点等效应力等值线图(h=61 m)Fig.10 The node of equivalent stresscontour map(h=61 m)
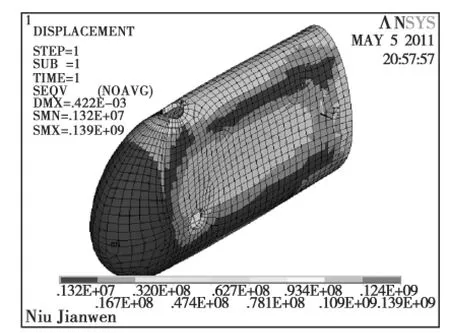
图11 单元等效应力等值线图(h=54 m)Fig.11 The element of equivalent stress contour map(h=54 m)
再次通过ANSYS软件进行分析。在分别选取水深为54 m~61 m的情况下,加载和约束的方法同上,经整理得出相应的数据,结果见表1。
从表1可以看出,当水深小于57 m时,壳体可以保证其强度要求。而当水深为58 m时,最大单元等效应力大于YL12的许用应力,此时机器鱼壳体已不再安全。

表1 ANSYS结构力学分析结果Tab.1 ANSYS structure mechanics analysis results
4 结论
通过实例阐述了利用三维建模软件Solid Works建立实体模型以及其与有限元分析软件ANSYS的对接,从而成功地对实体模型进行了有限元分析,并对设计结构进行了强度校核,得出以下结论:
1)通过建立ANSYS有限元模型,得出了在水深10 m时,机器鱼壳体的位移、应力图。由单元等效应力等值线图和节点等效应力等值线图的数据结果表明,当水深为10 m时,壳体结构性能安全可靠;

图12 单元等效应力等值线图(h=61 m)Fig.12 The element of equivalent stress contour map(h=61m)
2)通过对壳体结构进行模型简化,并在不同水深时,对壳体进行了强度校核,结果表明:水深为57 m时,壳体也是安全可靠的,但当水深达到58 m时,壳体已不再安全。
[1]喻俊志,陈尔奎,王硕.仿生机器鱼研究的进展与分析[J].控制理论与应用,2003,20(4):485-491.
[2]Weibing Wang,Junzhi Yu,Ming Wang,etal.Mechanical design and preli minar y realization of robotic fish with multiple control surfaces[C].The 29th Chinese Control Conference,Beijing,2010:3758-3762.
[3]王卫兵,喻俊志,成斌,等.两栖仿生机器鱼Ⅰ的建模及推进机构设计[J].石河子大学学报:自然科学版,2009,27(1):92-96.
[4]胡蓉,王卫兵,郭全林,等.仿生扑翼型机器鱼驱动机构的设计[J].石河子大学学报:自然科学版,2010,28(1):109-112.
[5]张朝晖.ANSYS12.0结构分析工程应用实例解析[M].北京:机械工业出版社,2010:1-43.
[6]龚曙光.ANSYS基础应用及范例解析[M].北京:机械工业出版社,2003:315-353.
[7]潘运平,郭鸣,李文涛.基于ANSYS的自动柜员机的力学性能分析[J].机械设计,2011,28(1):60-63.
[8]温宝琴,高广娣,韩正晟,等.基于ANSYS的齿形链式切割器刀片受力分析[J].农机化研究,2009(9):46-48.
[9]葛云,张立平,王卫兵,等.基于ANSYS的数控车床床身的动态特性分析[J].机械,2008,35(2):30-32.
[10]曾正明.实用工程材料技术手册[M].北京:机械工业出版社,2000:697-698.
Finite-element Analysis of Robotic Fish Shell Based on Solid Wor ks and ANSYS
NIU Jianwen,WANG Weibing,CHAO Guanliang
(College of Mechanical and Electrical Engineering,Shihezi University,Xinjiang 832003,China)
This article carries out three dimensional modeling of robot fish shell,by using finite element method f or structural perf or mance analysis,i mitate and obtain the r obot fish shell stress distribution data in different depth of water,and gets the shell in different depth of defor mation results,in order to calculate the maxi mum water depth of shell meet the strength requirements,it provides support for f urt her discussion of str uctural strengt h and opti mal design on the robot fish.
Robofish;Solid Works;ANSYS;stress analysis
TP242
A
1007-7383(2011)04-0509-05
2011-04-15
国家自然科学基金项目(60865004)
牛健文(1984-),男,硕士研究生,从事机械制造及其自动化研究;e-mail:j w8262570@126.com。通讯作者:王卫兵(1967-),男,副教授,从事机械CAD/CAM 及机器鱼的研究;e-mail:wwbshz@163.com。
