钻井液连续波传输的OQPSK调制原理与性能分析
2011-01-03李忠伟王瑞和
李忠伟,王瑞和,房 军
(1.中国石油大学 石油工程学院,山东 青岛 266555;2.中国石油大学 石油工程教育部重点实验室,北京 102249)
钻井液连续波传输的OQPSK调制原理与性能分析
李忠伟1,王瑞和1,房 军2
(1.中国石油大学 石油工程学院,山东 青岛 266555;2.中国石油大学 石油工程教育部重点实验室,北京 102249)
基于无线随钻测量对高传输速率和高可靠性的需要,提出钻井液连续波信号的OQPSK调制方式。分析QPSK的延迟正交调制与相干解调原理,研究输入比特序列相位矢量图的变化;依据连续波的产生原理,分析转阀调整相位的转动机制、调整相位时信号波形与转速变化的关系、OQPSK连续波系统的信息速率、频带利用率和误码率,并进行仿真。结果表明:OQPSK消除了π弧度的相位变化,属于恒包络调制,适合低信噪比的钻井液信道,同时简化了相位调整的复杂度,降低了发生器的设计难度;对于π/2和3π/2的相位变化转阀分别适合采用“减速-加速”和“加速-减速”的转动方式调整;采用位置闭环与速度闭环相结合的电机控制方式,既可获得相位稳定的信号,又可减小电机的动态扭矩;在相同载频和信噪比条件下,OQPSK的信息速率和频带利用率是二相键控系统的两倍,可改善无线随钻测量系统的传输性能。
钻井液;连续波;信号调制;偏移四相键控;控制逻辑;系统性能
目前,钻井液连续波信息传输技术是随钻测量系统中的主流技术[1-2],也是地质导向钻井中实现井下与地面之间数据高速传输的主要途径[3]。该技术以正弦压力波为载波,以井下测量数据为调制信号,通过对波形幅度、频率或相位的调制实现数据传输。在地面由压力传感器检测立管中的压力变化[4],对测得的压力波信号进行滤波、解调并恢复出井下数据。目前,钻井液连续波传输技术中常用的信号调制方式有FSK和PSK。其中FSK易于实现,但是信息速率相对较低;PSK可以获得较高的传输速率,但是连续波发生器的控制比较复杂,特别是对电机的动态性能要求较高。目前,中国试验开发的连续波发生器主要采用2PSK调制,信息速率和频带利用率均不高。国外先进的钻井液连续波通信系统均采用多进制相移键控调制的连续波技术,以载波频带方式进行数据传输[5]。提高信息传输速率和可靠性是随钻测量系统的主要目标,但同时也要考虑系统的技术可行性。笔者提出利用OQPSK进行钻井液连续波信号调制的方式,包括基本的信号调制与解调方案和调制方案对转阀的控制逻辑和发生器的实现方式。
1 移位四相相移键控调制分析
1.1 延迟正交调制与相干解调
四相相移键控调制(QPSK)存在一个固有问题,即当码组“0011”或“0110”通过时波形会产生π弧度的相位变化,这将引起较大的包络起伏,在接收机中通过非线性部件时,使得已经滤除的带外分量又重新被恢复出来,产生额外的符号差错,从而影响通信系统的可靠性。
为了消除π弧度的相位变化,发展出了偏移四相相移键控调制 Offset QPSK,简称 OQPSK。它与QPSK具有相同的相位关系,把输入的二进制数据流分成两个支路,进行正交调制。不同的是,OQPSK调制时使正交支路相对于同相支路移位(延后)一个比特周期T,如图1(a)所示。这样每个比特周期内只可能有一路数据发生极性翻转,结果使得OQPSK只会发生0或±π/2弧度而非π弧度的相位变化,从而成为一种恒包络调制方式。
图1中的m1(t)和m2(t)是由输入的比特流m(t)分解得到的两个子数据流,分别代表系统的同相和正交分量。QPSK信号[6]可写为

式中,Ac为载波幅度;fc为频率;θk为相位。
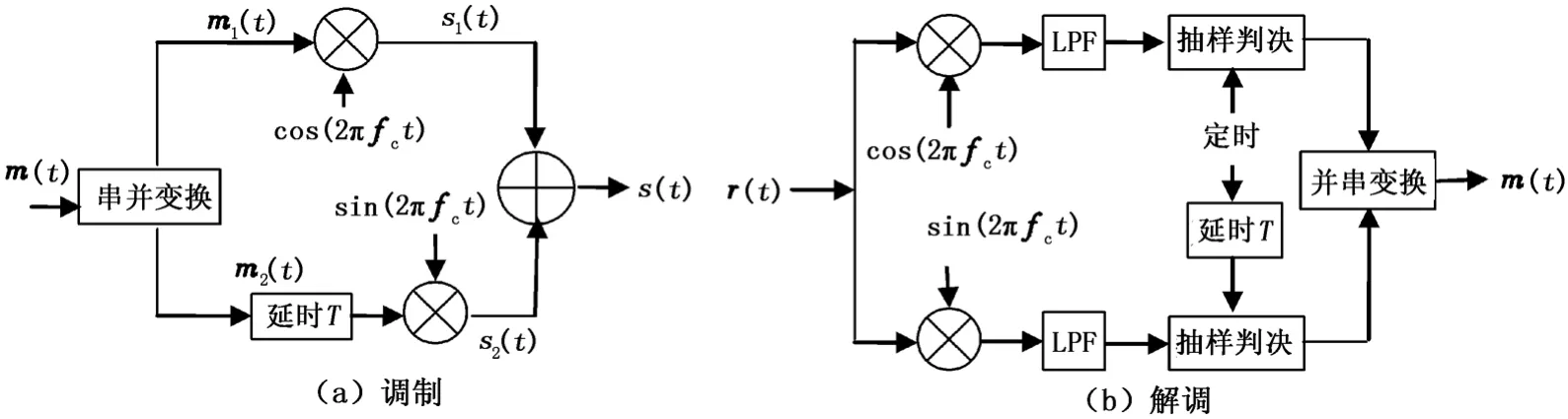
图1 移位四相相移键控调制解调原理示意图Fig.1 Schematic diagram of OQPSK modulation and demodulation principle
OQPSK因为正交分量比同相分量延迟一个比特周期T,所以可写为

相应地,OQPSK解调时正交支路上的数据需要先延迟T再进行判决,如图1(b)所示。系统采用相干解调[7]时同相支路的数据与载波相乘得


经过低通滤波去除高频分量后得同相分量为m'1(t)=m1(t)/2,正交分量为 m'2(t)=m2(t)/2,这样就恢复出了上下支路的原始信号,然后经抽样判决和并串变换后就得到了原始数据流m(t)。
1.2 相位变化特点
延迟电路的引入使同相、正交两个支路的比特符号偏移了半个码元周期(即一个比特周期T)。在OQPSK 调制过程中,设 tn、tn-1和 tn+1分别表示3 个连续比特周期的开始时刻,满足如下条件:

假设两个支路的矢量合成顺序为m1(tn-1)、m2(tn)、m1(tn+1),那么这3个比特有8种数据形式。分析可知,m1(tn-1)和m2(tn)合成tn时的信号矢量,而m1(tn+1)和m2(tn)合成tn+1时的信号矢量。规定OQPSK采用π/2的相位体系[8],且逆时针为矢量增加方向,表1中列出了信号相位从tn到tn+1时的变化情况。

?
从表1可以看出,在π/2体系下OQPSK的信号有4种固定的相位状态,分别为0、π/2、π和3π/2。另一方面,无论输入的码元出现何种数据排列形式、合成矢量位于哪个象限,OQPSK信号波形的相位变化只会是0(4次)、π/2(2次)和3π/2(2次)。因此OQPSK消除了π弧度的相位变化,这使得它相比QPSK成为恒包络调制方式,非常适合低信噪比环境的钻井液信道通信系统。
2 OQPSK在连续波发生器中的实现
连续波发生器依靠转阀中转子相对于定子的连续转动改变钻井液的流通面积来产生连续压力波信号。OQPSK在连续波发生器中的实现主要体现在连续波发生器相位调整的控制逻辑上,连续波信号的相位变化通过改变转子的转动速率来实现。转子的机械特性使得波形相位的调整无法在瞬间完成,需要一定的累积时间。为了解决这个问题,需要分析调制方式与转阀转动之间的逻辑控制关系[9]。
为了便于描述,首先定义:fz为转阀的转动频率,也是连续波信号的载频,设稳态时为fz0,Hz;Tz=1/fz为转阀的转动周期,稳态时记为Tz0,s;ωz为转动角速度,稳态时记为ωz0,rad/s;φz为相位,稳态时波形的初始相位记为φz0,rad,在稳态转动周期内,转阀的瞬时φz均等于φz0,但在相位调整周期内,二者并不总是一致;ab为四进制码元符号,又称双比特符号;n为传输一个码元需要的载波个数,又称处理增益,一般取值为 4[10]。
2.1 OQPSK的相位控制逻辑
将转阀的转动按照要调整相位差进行分类,0、π/2、π 和3π/2 相位差调整转动分别记为 z0、zπ/2、zπ和z3π/2。设a1b1和a2b2表示两个相邻的双比特码元,表2中总结了OQPSK控制转阀进行相位调整时各种转动类型的发生情况和调整频率。

表2 OQPSK的转阀控制逻辑与相位调整Table 2 Control logic and phase adjustment of rotary valve in OQPSK system
表2中码元a2b2包含两个比特周期,记为Tb1和Tb2,相应地用“Tb1转动”和“Tb2转动”分别表示Tb1和Tb2开始时转阀的转动逻辑。理论上表2中16种情形的发生概率相等,假设各发生一次时可统计出OQPSK和QPSK的转阀转动情况,如图3所示。
从图2中分析可知,相比于QPSK,OQPSK只有zπ/2和 z3π/2,而没有 zπ的转动逻辑。因此,OQPSK 使转阀少了一种转动逻辑,能够简化调整相位时的复杂度,降低连续波发生器的设计难度。这对于促进钻井液连续波四相相移键控测量系统的开发与应用具有重要意义。

图2 OQPSK与QPSK对转阀的控制逻辑比较Fig.2 Comparison between OQPSK and QPSK on control logic of rotary valve
2.2 相位调整时波形与转阀转速的对应关系
不同相位差的调整对压力波信号的波形和电机的转速变化有不同的影响。从压力波信号波形的角度出发,以相位调整占时最短为目标,分析OQPSK系统中π/2和3π/2两种相位差调整时转阀转动的控制逻辑与对应关系。
在传递一个码元的n个载波周期中,一般在第一个周期内完成转阀相位的调整。考虑电机的响应时间,一般采用“减速-加速”的策略进行相位调整。对于π/2的相位差,通过“减速-加速”的方式进行调整需要3/4个信号周期,如图3(a)所示;对于3π/2的相位差,则需要5/4个信号周期,调整时间过长。为了减少3π/2相位调整所用时间,改用“加速-减速”的方式进行调整,分析表明新的调整时间只需1/4个信号周期,如图3(b)所示。

图3 信号波形与电机转速的对应关系Fig.3 Relationship between wave shape and speed of motor
连续波发生器中的控制电机选用直流电机,其机械特性为

式中,ω为电机转速,rad/s;U为电机电压,V;CE为常数;Φ为励磁磁通,Wb;Ra为电枢电阻,Ω;CT为转矩常数;Te为负载扭矩,N·m。
由式(6)可知,电机转速与输入电压成正比。因此,在确定信号波形与电机转速的对应关系之后就可以确定所需输入的参考电压值。
为了获得相位稳定的连续波信号,电机的控制方式采用闭环控制,分为位置闭环控制和速度闭环控制。位置闭环控制以每一时刻转子相对于定子的位置作为输入信号,可以获得相位稳定的压力波信号,但是其相位调整过程属于瞬态相位调制,电机会发生反转,动态扭矩是匀速旋转时的十几倍;速度闭环控制以每一时刻的速度作为输入信号,由于电机的实际转速与期望转速之间总有一定的误差,而误差的累积最终反映在定子、转子相对位置的误差上,因此所获得的压力波信号相位波动较大,相位误差的累积很快就将真实的相位调制信号掩盖,但是速度闭环产生的动态扭矩比位置闭环控制的要小。因此,可以将位置闭环与速度闭环相结合来确定期望的位置信息。结合之后连续相位调制的位置输入与单独位置闭环时的位置输入的比较如图4所示。
分析图4可知,将位置闭环与速度闭环相结合来确定期望的位置信息,既可以获得具有稳定相位的信号,又可以减小电机的动态扭矩。
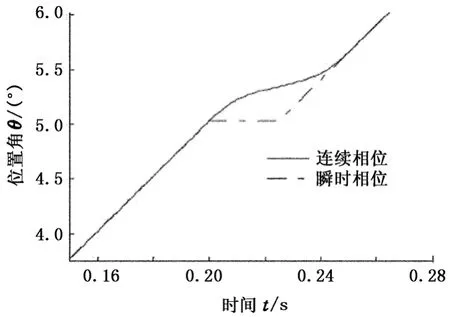
图4 连续相位调制的位置输入曲线Fig.4 Position input curve of continuous phase modulation
2.3 OQPSK的实现
设数据流中先后到达的两个相邻的双比特码元为a1b1和a2b2,相位分别为φ1和φ2。为了实现该数据流的传输,设计的转阀控制逻辑的算法流程如下:①计算相位差,Δφ=φ2-φ1,确定采用哪种信号波形,如图4所示;②确定相位调整开始的时刻t0;③以t0时刻为参考点,确定转子的相对位置与时间的对应关系,如图4所示;④将上述对应关系作为连续波发生器控制电机位置闭环控制的输入信号;⑤开始连续波信号的相位调整过程。
3 性能分析
(1)信息速率。钻井液连续波OQPSK属于四进制相位调制方式,其信息速率计算公式为

式中,Rb为信息速率,bit/s;Rs为波特率,B/s;M为进制数。
图5为OQPSK、2PSK的信息速率与fz、n的对应关系。图5说明在相同载频时OQPSK信息速率是2PSK的2倍,与QPSK相同。同时,处理增益n对速率有较大影响,在满足可靠性要求时OQPSK的信息速率随着n的减小而增大,这表明在信道条件较好时可以考虑用更少的载波来传递一个码元从而达到提高速率的目的。
(2)频带利用率。要分析OQPSK的频带利用率,首先要确定其频带宽度。由图1可知,输入的数据流m(t)是基于比特的,而子数据流m1(t)和m2(t)是基于双比特的,所以m1(t)和m2(t)的符号时间是m(t)的两倍,根据矩形脉冲的带宽与持续时间的关系可知式中,r为信号接收端的信噪比。相应地连续波2PSK采用相干解调方式下的误码率公式,即

图5 处理增益和载频对信息传输速率的影响Fig.5 Influence of processing gain and carrier frequencyon information transmission rate


因为输出信号s(t)具有与s1(t)和s2(t)相同的带宽,所以s(t)与输入信号m(t)带宽相同。频带利用率η的计算式可写为

OQPSK的信号和二进制数据流具有相同的频带宽度,分析公式(10)可知,在相同的载频下,由于OQPSK信息速率是2PSK的2倍,所以OQPSK的频带利用率也是2PSK系统的2倍。
(3)误码率。在OQPSK调制中,可认为4个信号矢量把2π弧度的相位平面划分成4等份,每一个相位间隔代表一个传输信号。在噪声的影响下信号和噪声叠加波形的相位就会发生变化,造成误码现象。假设钻井液信道的加性噪声近似符合高斯白噪声的特征,那么四相绝对相移键控调制系统的误码率[8]可写为
钻井液压力连续波可假定近似于正弦波,运用符号系统方法,衰减规律[11]可以表示为

式中,p(x)为信号传输x距离后的强度,Pa;p0为连续波发生器出口处压力的组合幅值,Pa;γ为波的传播系数。由此可推导出钻井液信道下带有加性高斯噪声干扰的信噪比模型为

式中,E0为连续波发生器出口处信号的功率参考值;n0为噪声的单边功率谱密度;B为信号的带宽。将式(14)代入式(11),得到带有加性高斯噪声干扰的钻井液信道下OQPSK的误码率为
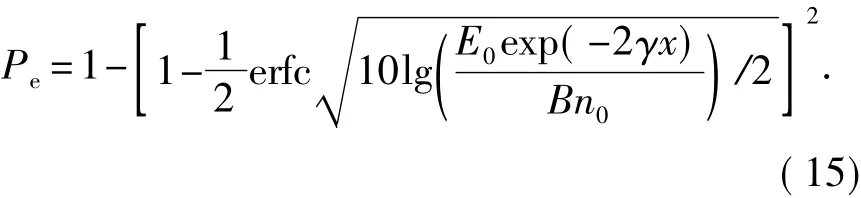
图6为OQPSK和2PSK的误码率随钻井液信道信噪比变化的曲线。从图6可以看出,随着信噪比的增大误码率呈现快速降低趋势,特别是当信噪比增大到18 dB时,OQPSK和2PSK系统的误码率降到非常低的水平,这表明可以通过提高发射功率或增加处理增益等办法提高信噪比,进而降低误码率。另外,在相同的信噪比条件下,OQPSK与QPSK等四进制调相方式类似,都比二进制调相系统误码率要高,这是获得更高的信息速率付出的代价。

图6 OQPSK的误码率和信噪比的关系曲线Fig.6 Relation between bit error rate and SNR of OQPSK
4 结论
(1)OQPSK同相支路和正交支路比特极性变化错开半个码元周期,二者不会同时发生极性翻转,从而消除了π弧度的相位变化,使OQPSK相比QPSK成为恒包络调制方式,这非常适合低信噪比环境的钻井液信道通信系统。
(2)OQPSK使转阀少了一种转动逻辑,能够简化相位调整的复杂度,降低连续波发生器的设计难度。
(3)在保证相位调整时间占用载波周期最短的条件下,对于π/2相位调整,适合通过“减速-加速”的方式进行调整,需要3/4个载波周期;对于3π/2相位调整,适合采用“加速-减速”的方式进行调整,需要1/4个载波周期。为了获得相位稳定的连续波信号,电机的控制方式将位置闭环与速度闭环相结合来确定期望的位置信息,既可以获得相位稳定的信号,又可以减小电机的动态扭矩。
(4)在相同信噪比条件下钻井液连续波OQPSK系统的信息传输速率、频带利用率是二进制相移键控系统的2倍,其代价是误码率比后者稍差,但是可以通过提高发射功率或增加处理增益等办法提高信噪比,进而降低误码率。
[1]MARTIN C A,PHILO R M,DECKER D P,et al.Innovative advances in MWD[R].SPE 27516,1994.
[2]KLOTZ C,WASSERMAN I,HAHN D.Highly flexible mud pulse telemetry:a new system[R].SPE 113258,2008.
[3]沈忠厚,黄洪春,高德利.世界钻井技术新进展及发展趋势分析[J].中国石油大学学报:自然科学版,2009,33(4):64-70.
SHEN Zhong-hou,HUANG Hong-chun,GAO De-li.A-nalysis on new development and development trend of worldwide drilling technology[J].Journal of China University of Petroleum(Edition of Natural Science),2009,33(4):64-70.
[4]DETLEF Hahn,VOLKER Peters,CEDRIC Rouatbi.Oscillating shear valve for mud pulse telemetry[R].Patent-Storm,October,2007.
[5]沈跃,李翠,朱军,等.钻井液压力多进制相移键控信号的数值建模及特性分析[J].中国石油大学学报:自然科学版,2010,34(5):77-83.
SHEN Yue,LI Cui,ZHU Jun,et al.Numerical modeling and characteristics analysis of drilling fluid pressure MPSK signals[J].Journal of China University of Petroleum(Edition of Natural Science),2010,34(5):77-83.
[6]SIMON Haykin,MICHAEl Moher.现代无线通信[M].郑宝玉,译.北京:电子工业出版社,2006.
[7]PROAKIS John G,SALEHI Masoud.Communication systems engineering[M].Beijing:Publishing House of Electronics Industry,2002.
[8]樊昌信.通信原理[M].北京:国防工业出版社,2001.
[9]李荣喜.井下旋转控制压力信号发生器的设计与研究[D].东营:中国石油大学机电工程学院,2007.
LI Rong-xi.The design and research of the downhole pressure signal producer controlled by rotary value[D].Dongying:College of Mechanical and Electronic Engineering in China University of Petroleum,2007.
[10]HUTIN R,TENNET R W,KASHIKAR S V.New mud pulse telemetry techniques for deepwater applications and improved real-time data capabilities[R].SPE 67762,2001.
[11]B.B.库里奇茨基.定向斜井与水平井钻井的地质导向技术[M].鄢泰宁,郭湘芬,吴翔,等,译.北京:石油工业出版社,2003.
Analysis on OQPSK modulation principle and system performance of continuous pressure wave signal in drilling fluid channel
LI Zhong-wei1,WANG Rui-he1,FANG Jun2
(1.School of Petroleum Engineering in China University of Petroleum,Qingdao 266555,China;2.MOE Key Laboratory of Petroleum Engineering in China University of Petroleum,Beijing 102249,China)
Based on the needs for high transmission speed and high reliability of wireless measurement while drilling(MWD),the OQPSK modulation of drilling fluid continuous wave signal was proposed.The principles of delay orthogonal modulation and coherent demodulation of OQPSK were analyzed,and the changes in the phase vector of the input bit sequence were studied.According to the principle of continuous wave generation,the phase adjustment mechanism of rotary value and the relationship between the signal waveform and the rotational speed adjusting the phase were studied.The information transmission rate,band efficiency and bit error rate of the OQPSK continuous wave communication system were analyzed and simulated.The results show that OQPSK eliminates the phase transition of π,which belongs to constant envelope modulation,and is suitable for the transmission under low SNR drilling fluid channel,meanwhile simplifies the phase adjustment and reduces generator design.The rotary valve forms of"slow down-speed up"and"speed up-slow down"are suitable for π/2 and 3π/2 phase jump respectively.The motor control modes which combine closed loop position with closed loop velocity can achieve phase-stable signal and reduce the dynamic torque of the motor.In the same carrier frequency and SNR,OQPSK information rate and bandwidth efficiency are twice as the two-phase shift keying system,and can improve the wireless transmission performance of MWD system.
drilling fluids;continuous pressure wave;signal modulation;OQPSK;control logic;system performance
1673-5005(2011)05-0070-06
TE 254.1
A >
10.3969/j.issn.1673-5005.2011.05.013
2011-07-08
国家“973”课题(2010CB226700)
李忠伟(1978-),男(汉族),山西晋城人,博士研究生,主要从事井下系统、信息与控制工程研究。
(编辑 李志芬)
