多功能动物减重训练跑台的研制
2010-12-31姜军庆周厚伦何际平华中科技大学控制科学与工程系图像信息处理与智能控制教育部重点实验室武汉430074
姜军庆 徐 琦* 周厚伦 何际平,3(华中科技大学控制科学与工程系图像信息处理与智能控制教育部重点实验室,武汉 430074)
2(华中科技大学同济医学院解剖教研室,武汉 430030)
3(美国亚历桑那州立大学生物工程系,AZ 85287,美国)
引言
传统的减重疗法在临床上已得到广泛应用,减重疗法是指在康复训练过程中,通过减重支持装置减少患者下肢(对于动物来说是后肢)的负重,并将步行三要素(负重、迈步、平衡)有机地结合起来,促进正常步态模式的建立[1]。脊髓硬膜外电刺激(epidural spinal cord stimulation,ESCS)是由功能电刺激发展而来的新技术,临床实验结果表明,减重和ESCS的组合疗法用于不完全脊髓损伤患者行走功能的康复,具有提高行走能力和调节运动能量代谢的功能[2-4]。
尽管减重和ESCS的组合新疗法在实验研究和临床康复领域有着不可低估的重要地位,但其确切作用机制至今仍未完全阐明,大大阻碍了该疗法广泛用于脊髓损伤患者的临床康复治疗,因此需通过动物实验探究该疗法最基本的神经机制,指导临床应用。
国外研究人员开发了减重疗法的动物实验装置,Robomedica公司的Rodent Robot 3000跑台具有减重支持系统和机械手辅助装置[5],可用于脊髓损伤动物的减重跑台训练。但国内可用于减重训练的动物跑台则未见报道,屠文展等[6]设计的大鼠水中跑台,对水中平板步行训练疗法治疗脊柱骨髓损伤的效果和机制进行动物模拟实验,无法模拟陆地步行训练环境,该跑台功能单一,没有用于辅助不完全脊髓损伤大鼠进行后肢运动训练的康复机械手,不能用于减重及其组合疗法的动物实验研究。为此,本文研制一种多功能动物减重训练跑台,为研究减重和ESCS组合疗法的神经机制提供先进的动物实验手段。由于鼠的基因与人类的基因较相似,医学研究常采用大鼠作为实验对象,本课题研制的减重跑台主要用于对不完全脊髓损伤大鼠进行减重跑台训练,促进其后肢运动功能恢复,也可对健康大鼠实施不同强度的跑台训练,用于运动医学研究。
1 材料和方法
1.1 跑台的性能指标
为满足不完全脊髓损伤动物的减重训练要求,所研制的多功能动物减重训练跑台的性能指标如下:
1)针对不同的运动强度训练,跑台的跑带速度在0~25cm/s范围内无级可调。
2)设计一套减重支持装置,减重范围为大鼠体重的0~100%(步长1%)。对于脊髓损伤导致后肢运动功能障碍的大鼠,当其在跑带上训练时,后肢无法承受整个身体的重量,减重支持装置通过稳定大鼠躯干来使其保持平衡,并通过对大鼠施加向上的拉力来减轻大鼠后肢的负重。
3)设计一种辅助大鼠后肢运动的机械装置,即康复机械手。大鼠由于脊髓损伤后出现运动功能障碍,运动意识变弱,在减重条件下,后肢有可能仍然无法运动,康复机械手将机器人技术应用于大鼠脊髓损伤后的后肢运动功能康复训练,辅助大鼠完成步行训练,减轻实验人员的负担,提高训练效率,还可记录详实的肢体运动数据,用于行走功能的定量评价。
1.2 跑台的机械结构设计
如图1所示,本研究研制的多功能动物减重训练跑台包括跑步机、减重支持装置和康复机械手三部分。

图1 多功能动物减重训练跑台的结构Fig.1 Configuration of the multifunctional treadmill for the animal training with partial body weight support
1.2.1 跑步机设计
跑步机采用单一跑带设计,可独立拆装的透明有机玻璃挡板将跑带隔离成两个独立跑道,当不采用减重疗法时,跑带速度在0~25cm/s范围内无级可调,实验过程中根据实际情况设置不同的跑带速度,使大鼠完成不同强度的运动训练。跑步机可以同时对两只大鼠进行测试,所有受试条件相同,动物运动互不影响,在每个区域的后壁玻璃上装有一排刺激电极,当大鼠不跑或跑速低于跑带速度时,大鼠就会触到后壁板上的刺激电极而受到电刺激,迫使大鼠按照实验要求的运动速度向前奔跑。当采用减重疗法时,拆除有机玻璃挡板,使用减重支持装置。另外,考虑到在训练过程中大鼠的排泄物有可能随跑带运动而掉入跑步机内,难以清理,因而在跑带运动的末端安放一个便于取出的抽屉,用于盛装和清除垃圾。
1.2.2 减重支持装置设计
如图2所示,减重支持装置为一套杠杆系统,杠杆的一侧通过铝片和吊带背心固定大鼠的躯干,使其保持站立姿势,在大鼠训练过程中支撑腿变化时,保持其身体平衡,并对大鼠提供一个向上的拉力,减小其后肢承重。向上的拉力由另一侧的弹簧产生,并通过拉力传感器检测。
铝片内侧面与跑带表面的夹角在一定范围内可调,从而使大鼠保持不同的站姿,通过旋转(手动或直流电机驱动)旋杆上下移动拉力传感器,改变弹簧的拉伸长度,调整弹簧间接施加于大鼠的向上拉力,大鼠后肢负重也随之变化,为大鼠提供有效的减重支持。实验过程中根据实际情况设定适当的减重重量,提供有利于不完全脊髓损伤大鼠运动训练的环境。

图2 减重支持装置的机械结构Fig.2 Mechnical structure of partial body weight support unit
1.2.3 康复机械手设计
减重状态下的大鼠在跑带上行走时,后肢在矢状面内具有两个自由度,同时在冠状面内也有轻微的偏移,因此康复机械手应具有3个自由度。考虑到这种多自由度设计仅为保证训练的舒适性,使后肢运动更接近自然状态,实际上大鼠后肢在冠状面内的运动非康复训练所必需,因此将机械手设计成矢状面内两个自由度[7],在其末端安装一个鳄鱼夹,通过尼龙搭扣与大鼠后肢的踝关节连接,从而使得大鼠后肢在冠状面内可产生轻微的运动。
康复机械手的结构如图3所示,由连杆机构、联轴器、角度传感器、固定板和驱动电机构成。图4的康复机械手连杆机构由两个步进电机驱动,主动杆L1和L2分别安装于步进电机1和2的转轴上,直接由电机驱动,杆L3、L5、L6和等腰直角三角形杆L4为从动杆,各杆之间通过轴承和圆键配合连接,保证连杆机构紧凑,无间隙。当电机1转动时,杆L1、L3、L4、L5和L6产生相应运动;当电机2转动时,杆L2、L5和L6产生相应运动。角度传感器通过联接轴与步进电机转轴联接,通过跟随步进电机转动测出杆L1和L2的相对于给定坐标系的位置,进而通过运动学方程求出机械手末端的位置。通过对两个步进电机的协调控制,使杆L6末端带动大鼠后肢实现矢状面内两个自由度的运动。

图3 康复机械手的机械结构Fig.3 Mechnical structure of rehabilitation robot

图4 康复机械手的连杆机构Fig.4 Planar linkage of rehabilitation robot
当具有后肢运动功能障碍的大鼠进行减重跑台训练时,康复机械手可提供两种训练模式:
1)被动运动训练模式:康复机械手抑制大鼠后肢产生的异常运动,辅助后肢完成正确的训练任务。
2)主动运动训练模式:大鼠后肢运动不受限制,康复机械手被动地跟随后肢运动,不提供辅助力,记录大鼠后肢的关节运动轨迹,用于运动功能的定量评价。
1.3 跑台控制系统的设计
跑台控制系统主要包括跑带速度、减重重量和康复机械手的控制,驱动机构均为电机,通过安装拉力传感器和角度传感器,实现闭环控制,提高控制精度。
图5所示的跑台控制系统分为主控模块、信号 采集调理模块和电机驱动模块。
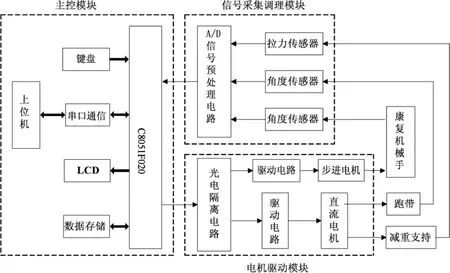
图5 多功能动物减重训练跑台的控制系统框图Fig.5 Block diagram of the control system in the multifunctional treadmill for the animal training with partial body weight support
主控模块包括C8051F020最小系统、串口通信电路、键盘电路、LCD接口电路外扩FLASH数据存储电路和上位机等,其中由电源电路、复位电路、晶振电路和JTAG接口电路等组成的C8051F020最小系统主要用于跑带速度的调节、减重支持装置的减重重量设定、康复机械手运动学和逆运动学的分析处理以及控制算法的实现等。上位机提供动物康复训练的人机交互界面,用来设定跑带的启动、停止和速度;设置动物减重重量、机械手辅助大鼠后肢训练时的步频和训练时间设置等;记录脊髓损伤大鼠减重训练过程的运动参数,定量评价康复效果。C8051F020与上位机之间通过RS232接口进行串口通信,实现C8051F020与上位机的数据交互。当单片机控制系统脱离上位机独立使用时,可用按键设置控制参数,并通过液晶和数码管显示,训练过程中的运动数据则存储于外扩的FLASH中。单片机C8051F020将FLASH中存储的训练数据传给上位机,用于康复效果的分析评价。
信号采集调理模块通过拉力和角度传感器分别采集拉力和位置信号,拉力传感器(型号:JLBS-3)的供电电压采用5VDC,输出信号为0~5mV。由于 C8051F020[8]的A/D口允许的输入电压范围为0~VREF,故选用仪用放大器AD620作为前置放大器,将传感器输出信号放大并低通滤波后送入C8051F020的A/D口。但C8051F020的A/D口不允许输入负电压,而拉力传感器存在零点偏移,即拉力为零时可能输出负电压,可通过为AD620提供电压偏置电路,保证其输出电压范围为0~VREF。角度传感器选用模拟输出磁性编码器(型号:ED-18-SB-0050-V-P),输出信号为0~5V,经过精密运放OPA2277调整为0~VREF,低通滤波后送入C8051F020的A/D口。
电机驱动模块包括直流电机和步进电机驱动。直流电机用于提供跑步机的跑带速度和减重支持装置的减重重量,其驱动电路包括L298双全桥驱动、电流检测和保护电路。L298双全桥驱动器通过输入PWM信号控制电机的转速,输入高低电平信号实现电机的正转/反转/停转。步进电机用于康复机械手的运动控制,其驱动芯片THB6128为双全桥MOSFET驱动,最高可达到1/128细分,满足低速运行时振动较小的要求,且内置温度保护及过流保护,适合本文选用的42系列步进电机驱动。
1.4 动物减重训练过程
当大鼠在跑台上进行减重训练时,康复机械手可为其提供主动和被动运动两种模式。多功能减重跑台工作流程如图6所示。
步骤1:确定期望轨迹。采用减重支持装置固定健康大鼠,其后肢在完全负重状态下进行主动跑台训练,此时康复机械手不提供辅助力,仅跟随后肢运动,通过角度传感器记录大鼠后肢的运动轨迹。当具有后肢运动功能障碍的大鼠进行被动跑台训练时,将多次重复记录的健康大鼠运动轨迹的平均值作为康复机械手控制的期望轨迹。

图6 多功能动物减重训练跑台的工作流程图Fig.6 Flow chart of multifunctional treadmill used for the animal training with partial body weight support
步骤2:训练参数设置。通过上位机或键盘设定跑步机速度、训练时间、康复机械手辅助大鼠后肢训练的步频等,调整减重重量,采用VC界面或液晶显示设置的参数。
步骤3:被动运动模式。在减重环境下,后肢运动功能障碍的大鼠进行被动运动训练,以步骤1所确定的轨迹作为被动训练的期望轨迹,康复机械手辅助后肢完成训练任务。具体流程为:角度传感器检测康复机械手主动杆位置,采用运动学处理得到康复机械手末端(即大鼠后肢)的实际位置,将该实际位置与期望运动位置的差值作为控制器的输入,控制器进行运算处理后,输出相关安全范围内的控制信号,控制电机带动康复机械手运动,直到训练任务完成。
步骤4:主动运动模式。由于后肢运动功能障碍的大鼠通过减重跑台训练,后肢运动功能会逐渐恢复,在减重环境下大鼠后肢能完成跑台训练,此时康复机械手不提供辅助力,仅跟随后肢运动,通过角度传感器可记录大鼠后肢的运动轨迹,用于运动功能的定量评价。
1.5 跑台性能验证
所研制的多功能动物减重训练跑台样机和控制面板如图7和图8所示,通过控制面板可以设置跑步机速度、大鼠训练模式、训练时间等参数,并通过数码管和液晶显示。与同济医学院解剖教研室合作,共同完成该跑台性能的动物实验验证。实验选取健康大鼠6只,不完全脊髓损伤大鼠2只。

图7 多功能动物减重训练跑台样机Fig.7 Prototype of multifunctional treadmill for the animal training with partial body weight support

图8 多功能动物减重训练跑台的控制面板Fig.8 Control Panel of multifunctional treadmill for the animal training with partial body weight support
1.5.1 健康大鼠不同强度的跑台训练
拆下跑步机上的减重支持装置,安装透明有机玻璃挡板,将跑步机跑带隔离成2个独立跑道。将6只健康大鼠分三组分别放入独立跑道,跑步机初始跑带速度设定为10cm/s,对大鼠进行跑台训练直至其疲劳;为对大鼠实施不同运动强度的跑台训练,跑带速度按步长5cm/s递增,大鼠经过一段时间的体能恢复后再次跑台训练至其疲劳。上述大鼠跑台训练直至其疲劳的过程重复4次,分别记录大鼠跑台训练强度和每次的持续时间。采用ANOVA分析法,对相同大鼠不同强度跑台训练的持续时间的差异性以及不同大鼠同一训练强度时的持续时间的差异性进行分析。
1.5.2 不完全脊髓损伤大鼠的减重跑台训练
拆下跑步机上的透明有机玻璃挡板,安装减重支持装置,大鼠穿上有尼龙搭扣的背心,粘附在减重支持装置的铝片上,通过改变弹簧的拉力,为大鼠后肢提供不同的减重支持。
跑带速度设为9cm/s,对2只不完全脊髓损伤的大鼠进行减重跑台训练,减重支持装置提供的减重重量从0%开始,按5%逐步增加,观察大鼠后肢的运动情况。
1.5.3 基于康复机械手的大鼠被动运动训练
将跑步机跑带速度设为9cm/s,减重环境下将康复机械手末端的尼龙搭扣与大鼠后肢的踝关节相连,辅助大鼠后肢完成运动训练,记录大鼠后肢运动轨迹。
2 实验结果
2.1 健康大鼠不同运动强度的跑台训练
6只健康大鼠不同强度跑台训练的测试数据如表1所示,持续运动时间随不同训练强度的变化如图9所示,可以看出,随着运动强度的增加,健康大鼠的持续训练时间逐渐减少,个体存在差异。

表1 6只健康大鼠不同强度跑台训练的测试数据Tab.1 The measured results of healthy rats with different intensity of treadmill training

图9 健康大鼠实施不同强度跑台训练的测试结果Fig.9 The measured results of normal rats with different training intensity
由ANOVA分析可知,健康大鼠不同强度跑台训练的持续时间存在显著差异(P<0.01),而同一训练强度时,不同大鼠的持续训练时间没有明显差异(P>0.05)。结果表明,该动物跑台可为健康大鼠提供不同强度的运动训练。
2.2 不完全脊髓损伤大鼠的减重跑台训练
实验发现,减重重量较小时,大鼠后肢无法承受身体的重量,在跑带上拖曳;随着减重重量的增加,大鼠的后肢拖行现象逐渐改善,当减重分别增加到35%~45%的范围内时,2只不完全脊髓损伤大鼠的后肢拖曳现象消失。
2.3 基于康复机械手的大鼠被动运动训练
减重条件下,康复机械手辅助大鼠后肢运动训练如图10所示,康复机械手带动大鼠后肢踝关节实现矢状面内两个自由度的运动。图11为大鼠跑台训练行走25步的踝关节运动轨迹,用灰色曲线表示,黑色曲线为所有轨迹的平均轨迹,横坐标表示水平方向位移,纵坐标表示垂直方向位移,图中数字标记为水平方向和竖直方向位移的平均值,以及所有运动轨迹的标准差。

图10 康复机械手辅助的大鼠减重跑台训练Fig.10 Treadmill training of the rat assisted by robotic arm

图11 大鼠跑台训练中后肢踝关节的运动轨迹Fig.11 Hindlimb ankle joint trajectory of the rat in treadmill training
实验结果表明,康复机械手可在被动运动训练模式下辅助不完全脊髓损伤大鼠的后肢运动训练,同时记录大鼠后肢的运动轨迹。
3 讨论和结论
所研制的多功能动物减重训练跑台的跑带速度在0~25cm/s范围内无级可调,对健康大鼠进行不同运动强度的跑台训练;减重支持装置减重范围为大鼠体重的0~100%,采用拉力传感器精确控制减重重量的调整步长达1%,为处于不同康复阶段具有后肢运动功能障碍的大鼠提供所需的减重支持;为减轻实验人员的负担,提高训练效率,康复机械手将机器人技术用于脊髓损伤大鼠的运动功能康复,具有矢状面内两个自由度,运动频率可调,辅助具有后肢运动功能障碍的大鼠完成行走训练,采用角度传感器记录大鼠后肢踝关节的运动轨迹,用于运动功能的定量评价。该跑台提供了先进的动物实验手段,通过动物实验将阐明减重及其组合疗法应用于行走功能康复的神经机制,指导临床应用。
本跑台采用以C8051F020单片机为核心的控制系统,集成拉力传感器和角度传感器,实现闭环控制,提高了控制精度和可靠性,良好的人机接口为实验员提供方便可靠的操作方式。初步动物实验的结果表明,跑台可同时对两只健康大鼠进行跑台训练,根据实际需要设定跑带速度,满足不同的训练强度要求;减重支持装置通过稳定大鼠躯干的方法使其保持平衡,采用拉力传感器精确控制对大鼠施加向上的拉力,为具有后肢运动功能障碍的大鼠提供必要的减重支持,构建有利的康复训练环境;对于不完全脊髓损伤后运动功能障碍的大鼠,其运动意识变弱,在减重条件下后肢仍然无法运动,康复机械手可辅助其完成特定的步行训练,并记录详实的运动数据,用于行走功能的定量评价,为运动医学、减重及其组合疗法的动物实验研究提供非常重要的实验手段。
安全问题是康复机器人设计过程中的一个重要方面,本跑台的康复机械手直接对动物的患肢进行操作,因此在保障患肢安全方面要求很高,需根据康复训练的基本动作和安全性的要求,在设计中除了考虑机器人的功能实现外,还要防止患肢二次损伤,后续的研究工作之一应该从机构设计(硬件)和控制系统(软件)两个方面保证康复机械手的安全性。另一方面,大鼠穿上吊带背心通过铝片与减重支持装置连接,如何改善吊带背心的穿着舒适性也是后续工作需解决的问题。
在康复训练过程中,康复机械手仅提供最小的辅助力,使具有运动功能障碍的大鼠最大程度地进行患肢的主动运动,有利于提高康复效果,未来的研究工作是采用力传感器检测患肢与康复机械手之间的接触力,构建闭环控制系统,使大鼠患肢在最小辅助力作用下完成康复训练。
未来后续的动物实验将在本跑台康复机械手记录大鼠后肢运动轨迹的基础上,采用植入式电极记录后肢主要肌肉的肌电信号和基于视频的动物运动分析,基于多源信息融合技术定量评价大鼠后肢的行走功能。由于动物实验需对多组脊髓损伤大鼠(如对照组、假刺激组、刺激组等)进行跑台训练,为减轻实验人员的负担,缩短实验周期,我们目前正在开发多跑道动物减重训练跑台,可同时对4只不完全脊髓损伤的大鼠进行减重跑台训练,所有训练条件相同,动物运动互不干扰。
[1]曾育山,陈其强,唐月清.减重支持系统训练对脑卒中偏瘫患者步态的影响[J].海南医学,2005,16(6):70-71.
[2]Herman R,He Jiping,D'Luzansky S,et al.Spinal cord stimulation facili-tates functional walking in a chronic,incomplete spinal cord injured[J].Spinal cord,2002,40:65 -68.
[3]Carhart MR,He Jiping,Herman R,et al.Epidural spinal-cord stimulation facilitates recovery of functional walking following incomplete spinal-cord injury[J].IEEE Trans Neural Syst RehabEng,2004,12(1):32-42.
[4]Huang H,He Jiping,Herman R,et al.Modulation effects of epidural spinal cord stimulation on muscle activities during walking[J].IEEE Trans Neural Syst Rehab Eng,2006,14(1):14-23.
[5]DE LEON RD,ACOSTA CN.EffectofRobotic-Assisted TreadmillTraining and Chronic Quipazine Treatment on Hindlimb Stepping in Spinally Transected Rats[J].NEUROTRAuMA,2006,23(7):1147-1163.
[6]屠文展,姜穗,蒋松鹤.大鼠水中跑台[P].中国专利,申请号:200910095261.5,2009-6-17.
[7]Timoszyk WK,Merlo M,de Leon RD,et al.Second generation robotic systems for studying rodent locomotion following spinal cord injury[C].Procings of the Second Joint EMBS/BMES Conference.Houston,TX,USA,2002.2358 -2359.
[8]鲍可进.C8051F单片机原理及应用[M].北京:中国电力出版社,2006.
