基于模糊逻辑的电动汽车制动力分配及能量回收控制策略研究
2010-12-27徐国凯赵秀春
徐国凯,张 涛,赵秀春
(大连民族学院机电信息工程学院,辽宁大连 116605)
基于模糊逻辑的电动汽车制动力分配及能量回收控制策略研究
徐国凯,张 涛,赵秀春
(大连民族学院机电信息工程学院,辽宁大连 116605)
针对前轮驱动的电动汽车提出了一种基于模糊逻辑的制动力分配及能量回收控制策略。同时考虑了制动踏板行程、车速 (电机转速)、电池荷电状态等对电动汽车制动力分配的影响,使动力分配更加合理,从而有效地回收制动能量,提高能量利用率。仿真结果表明了该控制策略的有效性和优越性。
电动汽车;能量回收;制动力分配;模糊逻辑
电动汽车和混合动力电动汽车最重要的特性之一是具有可以回收制动能量的能力,显著提高电动汽车的续驶里程 (也叫作再生制动)。在电动汽车和混合动力电动汽车中的电动机可以被控制作为发电机运行,将制动时耗散的动能进行回收,存储在能量存储装置中得以再次利用,从而达到提高整车能量效率和增加续驶里程的目的[1-2]。
电动汽车和混合动力电动汽车的制动系统与传统汽车有所不同,它们的制动力矩分为两部分,由电机提供的能量回收制动力矩和由传统的制动器提供的制动力矩,两者之和即为总的制动力矩。因此,针对电动汽车和混合电动汽车的制动系统的设计就会面临两个基本问题:一是如何在再生制动和机械摩擦制动之间分配所需的总制动力,以回收尽可能多的车辆的动能;二是如何在前后轮轴上分配总的制动力,以实现稳定的制动状
态[3-5]。
本文从制动力分配的角度,基于电动汽车仿真软件ADV ISOR,探讨了电动汽车前后轮制动力分配方案的原理及特点,并以前轮驱动的电动汽车为例,考虑到制动踏板行程、车速 (电机转速)、电池的荷电状态(SOC)等因素对电动汽车制动力分配的影响,应用模糊逻辑进行制动力分配及能量回收策略的优化。
1 ADV ISOR制动力分配策略
在电动汽车和混合动力电动汽车中,再生制动尽管能够回馈制动能量,提高续驶里程,但仅仅依靠再生制动是不够的,传统的摩擦制动还是必需的。一方面,单纯的再生制动不能给驾驶者在制动时提供很好的感觉,容易使他们产生错觉。另一方面,在汽车需要紧急制动时,摩擦制动将起到关键性的作用。只有将再生制动与摩擦制动有效结合,才能产生一个高效的制动系统。
在所需的总制动力中,假设X%的制动力由再生制动提供,另外的(100-X)%的制动力由摩擦制动提供。前轮再生制动系数X是一个与车辆行驶速度和电动机性能有关的参数。由于低速时回馈电流很小,充电效率低,因此一般情况下,再生制动在低速时的值要小于在高速时的值。
如图 1,给出了 ADV ISOR的制动力分配方案,基本原理是根据当前车速通过查表方式得到前轮电机再生制动的分配系数fgen和前轮摩擦制动分配系数ffri(在 ADV ISOR中分别对应的变量名为 wh_fa_dl_brake_frac和 wh_fa_fric_brake_frac)。前轮的制动力分配系数表如图 2,这个表是在WH_S MCAR.m文件中定义的,可以通过修改来达到不同的分配形式。前轮制动力分配完毕后,剩余的制动力由后轮的摩擦制动提供。

图 1 ADV ISOR中制动力分配方案
ADV ISOR提供了一种简单有效的制动力分配方案,但也有相当多的不足。首先,未考虑其他因素的影响,如制动踏板行程和电池 SOC;其次,该分配方案相对固定,无法保证实现最大可能的回收能量;另外,电动汽车运行工况复杂,很多参数均在不断的变化之中,建模相对比较困难,因此,提出借助模糊控制的相关理论分析来解决此问题。
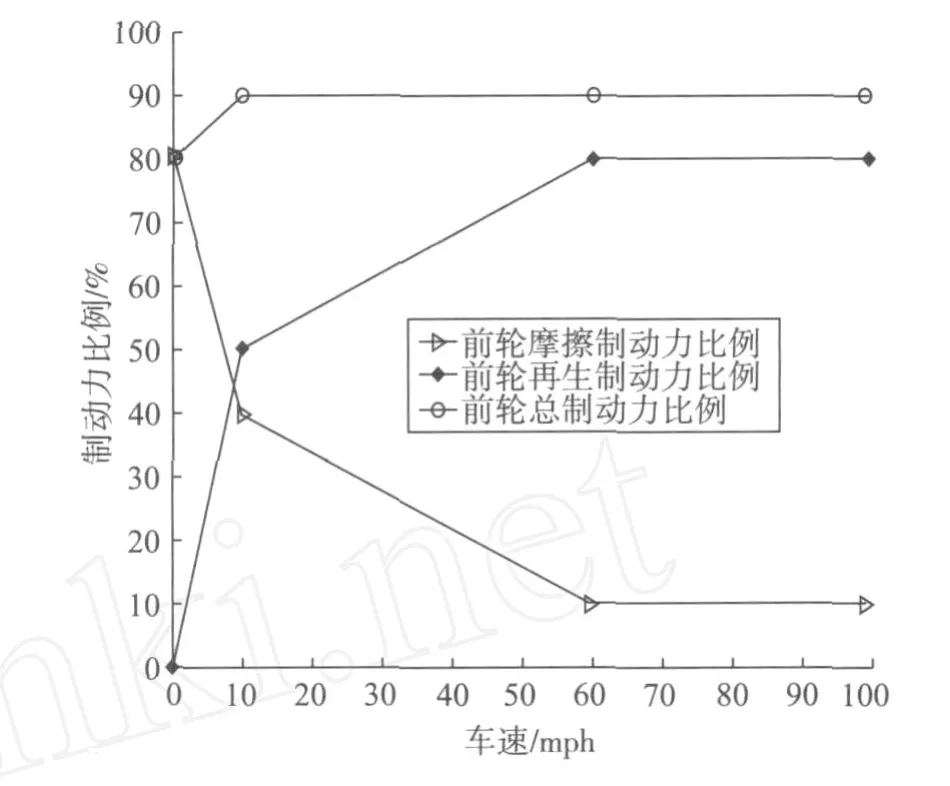
图 2 ADV ISOR中制动力分配系数
2 基于模糊逻辑的制动力分配和能量回收策略
Oakland大学、Ohio州立大学、国际可回收能源实验室、Seoul大学等早前的研究都表明模糊逻辑控制是非常适用于混合动力汽车控制的。模糊控制在测量不精确和部件特性有变化的时候具有很强的鲁棒必需性,特别是可以表达回收控制中难以精确定量表达的规则。
2.1 系统结构
影响电动汽车能量回收的因素很多,主要有电机的发电能力、电池的存储能力等。因此,需要输入的信息至少包括电池 SOC、车速 (电机转速)和驾驶员所需的制动力即制动踏板的行程。作为输出,由于制动转矩在电机和摩擦制动器之间分配,因此,只要确定一个,另一个也就确定了。
本文提出的基于模糊逻辑的控制策略的结构框图如图 3,主要由两个模块组成。第一个模块为模糊推理器模糊控制器模块,有 3个输入和 1个输出,输入分别为车速 (电机转速)、制动踏板行程和电池 SOC,输出为制动力分配系数;第二个模块为制动转矩修正模块,根据模糊推理器的输出和所需制动力的输入,最终确定机械制动转矩和电机制动转矩 (即再生制动)。
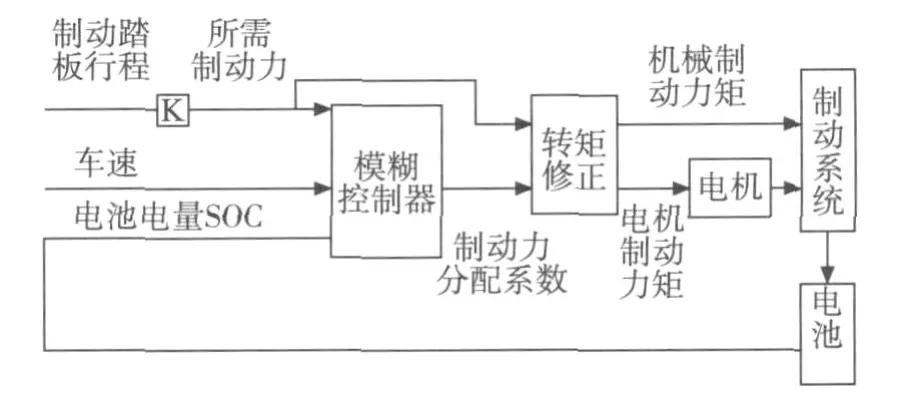
图 3 基于模糊逻辑的制动力分配及能量回收结构框图
2.2 输入量的模糊化
模糊控制器的 3个输入量分别是车速 (电机转速)、制动踏板行程以及电池 SOC,这 3个量的模糊化为后面模糊规则的解释和实施提供了先决条件。根据大量的实验数据和理论分析,为输入量车速 (电机转速)、制动踏板行程、电池 SOC以及输出变量再生制动力比例系数分别设计隶属度函数,如图 4中的 a,b,c,d。
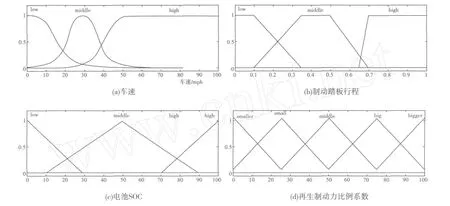
图 4 输入量及输出量的隶属度函数
车速 (电机转速)V的隶属函数如图 4(a)。模糊子集 middle表示当前车速属于一般行驶速度,例如在城市路况中;而模糊子集 high则表示车速比较高的时候,例如在高速公路或持续直线行驶时;模糊子集 low代表车速较低,如在车辆刚起步的时候或即将停车时。
制动踏板行程 Pos的隶属函数如图 4(b)。模糊子集 high表示对制动力需求较大,一般出现在急刹车的情况下。模糊子集middle表示对制动力的需求一般;模糊子集 low表示只需要较小的制动力,不希望车速发生较大的变化,一般出现在下坡或滑行时。
电池 SOC的隶属度函数如图 4(c),模糊子集middle表示当前电池电量处在一般的状态,而模糊子集 high则表示电池电量处在较高的状态,例如在电动汽车刚充满电又长下坡时,电机持续给电池充电使得电量较高;模糊子集 low则表示电池电量处在较少的状态,例如在电动汽车长时间驱动行驶,电池持续给电机供电使得电量较低。
2.3 模糊推理
制定制动能量回馈模糊规则时,应尽量保证整车的安全性与舒适性,同时尽可能回收更多的能量。根据实际经验和大量的仿真实验,总结出下面的模糊规则表,共有 27条规则,其中第 i条规则的表述形式为

所有规则见表 1。

表 1 模糊推理规则库
由此得到再生制动比例系数随着 3个输入量中的任意两个变化而改变的曲面图如图 5。从中可以看出,当电池 SOC一定时 (小于 0.7),随着车速的升高,再生制动的比例增大,由于电机的功率有限,为了保证电机在额定的功率内工作,当车速增加到一定值时,再生制动比例不再增大,维持在一个最大值,所以当电池 SOC大于 0.7时,即使车速增大,为了保护电池,再生制动的比例很低。
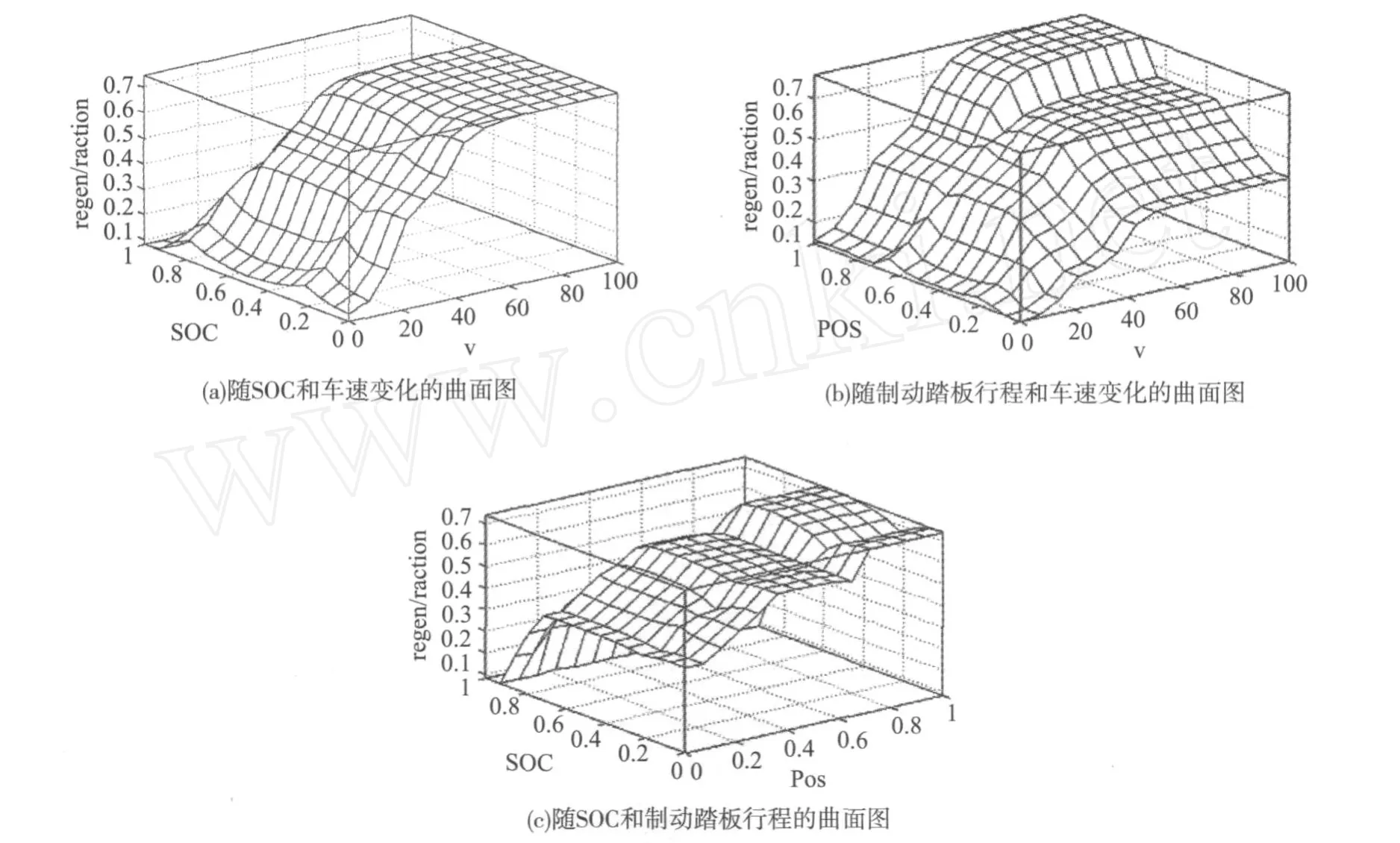
图 5 再生制动力比例系数随输入量变化的曲面图
2.4 输出量的去模糊化
由于输出的控制量是一个模糊量,而实际的控制量是确切量,应该用合适的判决方法将模糊控制量转变成确切量,考虑到整车驾驶的性能,采用加权平均法求得对应的电机再生制动所占的比例
进而得到电机的制动转矩。
3 仿真结果与分析
本文选择了 3种典型的城市驱动循环:欧洲ECE+EUDC、日本 1015和美国 UDDS来进行再生制动系统的仿真。
采用 ADV ISOR制动力分配、文献 [3]中的制动力分配和基于模糊逻辑的制动力分配 3种制动力分配策略和无回馈制动时的蓄电池剩余电量的比较见表 2,分别按欧洲 ECE+EUDC、日本 1015和美国UDDS工况运行了 1个工况循环,实验前蓄电池 SOC均为 1。

表 2 蓄电池剩余电量比较
由表 2可以看出,采用基于模糊逻辑的制动力分配及能量回收策略后,电动汽车在同一循环工况下消耗的能量不仅比无回馈制动和 ADV ISOR分配控制方案的能量消耗明显减少,蓄电池剩余电量的比例有所增加;而且因为考虑了电池SOC对电动汽车制动力分配的影响,同文献[3]中的制动力分配控制策略得到的仿真结果相比也有一些提高。
4 结 语
本文提出的基于模糊逻辑的制动力分配及能量回收控制策略,考虑了各种因素的影响,如制动踏板行程、车速 (电机转速)、电池 SOC等,通过对采用不同的控制方案对比,仿真结果表明了该控制策略具有更高的制动能量回收率和整车能量效率。
[1]MEHRDAD E,GAO Y imin,SEBASTIEN E G,et al.现代电动汽车、混合动力电动汽车和燃料电池车——基本原理、理论和设计 [M].倪光正,倪培宏,熊素铭,译.北京:机械工业出版社,2008.
[2]彭栋,殷承良,张建武.基于模糊控制的并联式混合动力汽车制动控制系统 [J].吉林大学学报:工学版,2007,37(4):756-761.
[3]徐海东.电动汽车再生制动能量高效回收控制策略研究 [D].济南:山东大学,2007.
[4]张健,王耀南,曹松波.基于模糊逻辑的电动汽车制动能量回馈控制策略 [J].工业控制计算机,2005,18(7):59-61.
[5]谢长君,全书海,姚玲.基于粒子群优化模糊控制器的电动汽车再生制动控制策略研究[J].武汉理工大学学报:交通科学与工程版,2008,32(4):669-672.
Research on Braking Force D istribution and Energy Recovery Control Strategy for Electric Vehicles Based on Fuzzy Logic
XU Guo-ka i,ZHANG Tao,ZHAO Xiu-chun
(College of Electromechanical&Information Engineering,Dalian NationalitiesUniversity,Dalian Liaoning 116605,China)
A braking force distribution and energy recovery control strategy for electric vehicles based on fuzzy logic is proposed in this paper.The travel of the brake pedal,the vehicle speed(or the rotation speed of the motor)and the battery's state of charge(SOC)are all considered in this strategy,so the braking force distribution isoptimized.In thisway,the braking energy is effectively recovered and,hence,the energy efficiency is increased.Emulation results show the effectiveness and excellence of the proposed control strategy.
electric vehicle;energy recovery;braking force distribution;fuzzy logic
U469.72
A
1009-315X(2010)03-0212-05
2009-10-30
辽宁省教育厅基金项目 (2008133)。
徐国凯 (1956-),男,辽宁抚顺人,教授,学校优秀教学带头人,硕士生导师,主要从事先进控制理论研究。
(责任编辑 刘敏)
