全球导航星座星间链路技术发展建议
2010-12-27林益明何善宝郑晋军初海彬
林益明 何善宝 郑晋军 初海彬
(北京空间飞行器总体设计部,北京 100094)
1 引言
当今,世界上有4 大全球卫星导航系统(GNSS),分别是美国全球定位系统(GPS)、俄罗斯全球导航卫星系统(GLONASS)、欧洲伽利略(Galileo)系统和我国北斗(Compass)系统。在全球卫星导航系统中,维持较高的卫星轨道和钟差确定精度,是确保导航接收终端获得系统要求的定位或授时精度的关键。通常获得精确轨道和钟差参数需要在全球范围布设大量地面站进行连续观测,而我国目前尚不具备这样的全球性战略地理资源。因此,我国迫切需要建设导航星座星间链路来弥补这一不足。
在全球导航星座内部建设星间链路后,通过少数的监测站即可获得精密轨道参数,星间链路还可以增加星历注入频度,而这两点均直接影响导航定位精度。当注入数据无法上注到星上导航任务处理单元时,通过星间距离观测值和预报星历、时钟数据可以提高星座自主运行能力。此外,地面站的测控信息可以通过星间链路进行传输,可大大增强地面站对星座的测控管理能力。
导航星座星间链路涉及到通信/电子、微波/天线、计算机/网络、结构/机构、轨道/定轨、控制/航天器总体设计等多学科多专业,技术难度大。国内目前对导航星间链路的研究正在进行,文献[1-2]对导航星间链路的几何特性(星间距离、俯仰角和方位角)、星间频段、链路预算进行了初步分析,文献[3-6]对导航星间网络拓扑与路由技术进行了初步的研究,文献[7]对GPS 星间链路做了较为详细的描述,文献[8]提出了星间网络拓扑的关联矩阵表示方法。但是这些研究仅着眼于某些技术细节,在导航卫星星间链路系统体制层面的战略性研究显得不足。
2 国外导航星座星间链路的分析
GPS是目前在轨导航星座中唯一实现了星间链路的系统,自Block IIR卫星开始,安装了具有自主导航功能的星间链路收发设备。星间链路采用时分多址(TDMA)和扩频体制,星间频段为UHF(250~290M Hz)。每颗卫星分配1.5s 的时间间隔,用于双频测距或通信。对于24颗卫星星座,36s为1个子帧,900s为1个主帧。第0子帧为测距帧;第1子帧用于星间测量伪距误差修正;第2子帧用于星座测量与处理数据通信;第3子帧为预留时间,可以用于数据处理和通信数据准备;第4~9子帧用于星座卫星星历及时钟参数交换;第10~24子帧为星间链路信号收发机预留时间,可以用于Kalman 滤波处理和导航电文编制等。GPS ⅡR/ ⅡRM 卫星星间链路测距周期可选择15min、1h、2h、3h、4h和6h,其中1h为缺省值设置。星间测距与通信链路由星间信号发射机、信号接收机、馈电网络、发射天线单元、接收天线单元以及信号与数据处理单元组成。星间链路发射采用双绕螺旋天线,接收采用阵列天线,要求天线波束相位中心稳定,波束边缘增益可达到7dBi 左右。
GPS 目前的UHF频段星间链路存在如下几点不足:1)数据速率较低,难以满足未来更多的需求;2)所选择的UHF频段不是国际电联(ITU)分配给星间链路使用的合法频段,其使用不受保护;3)宽波束的星间链路抗干扰能力难以提升;4)单个阵元发射的宽波束星间链路对地面UHF频段合法用户存在干扰。因此,美国已经计划在GPS III 卫星上开发高频段窄波束的星间链路。
除了GPS 在发展星间链路外,俄罗斯G LONASS 卫星导航系统和欧盟的Galileo 卫星导航系统也在规划和开发各自导航星座的星间链路。
本文将在国外多种类型卫星星间链路研究的基础上,对发展我国全球导航星座星间链路提出几点建议,以期明确国内在导航星座星间链路领域的技术发展方向。
国外在通信卫星星座、侦察编队飞行系统和全球导航卫星星座中均建有星间链路,除通信星座外,后两者均有星间通信和星间测距功能,而且全球导航卫星星座还具有自主导航功能。
3 高频段星间链路是国内空间技术发展的需要
空间无线电技术正在向更高频段发展,有两个主要原因:1)更高频段尤其是Ka 及其以上频段尚未被大规模开发,干扰较少且易于申请;2)高频自身也有很多优点,如波长短带来的设备尺寸小和重量轻。
表1是通常卫星业务的频率名称,目前实用的卫星系统基本上都在Ka 及其以下频段,Ka频段系统呈现逐渐增加趋势,美国地球静止轨道卫星已经开始采用V频段的星间链路系统。
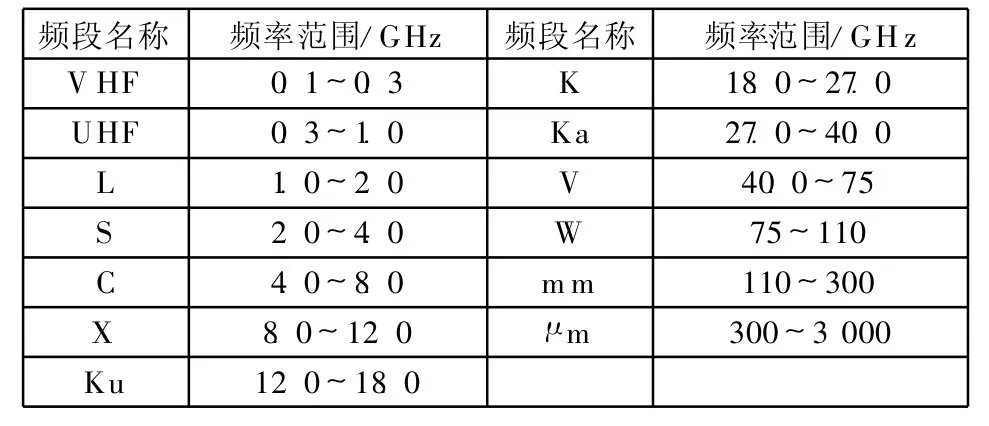
表1 通常卫星业务频率名称Table1 Frequency designation of satellite services
按照2008版的《无线电规则》频率划分表,国际电联(ITU)分配给星间研究与操作业务的频段有:
1)UHF频段 400.15~401M Hz,410~420M Hz,仅限于空间研究;
2)S频段2.025~2.11GHz,2.20~2.29GHz,只能用于空间操作、卫星地球探测和空间研究;
3)C频段5.01~5.03GHz,同时该频段也分配给航空无线电频段、卫星下行导航频段;
4)Ka频段(含表中部分K频段)22.55~23.55GHz,24.45~24.75GHz,25.25~27.5GHz
和32.3~33G Hz 均分配给星间使用;
5)V频段54.25~58.2GHz 和59~71GHz 均分配给星间使用;
6)毫米波频段116~123G Hz,130~134GHz,167~182GHz,185~190GHz 和191.8~200GHz均分配给星间使用。
另外,激光谱段也有分配星间使用的,光谱波长为0.8~0.9μm,1.06μm,0.532μm 和9.6μm 的光谱可用于星间链路[9]。
结合国际电联以往分配星间链路的频段来看,现在分配给星间链路使用的频段数目在增加,而且总的带宽也在增加。表2是国外具有星间链路的典型空间系统采用的星间链路频段。
从表2可以看出国外星间链路有UHF、S、Ku、Ka 和V频段,而且新一代的系统逐渐采用Ka 和V频段。
从技术本身发展趋势来看,星间链路也在向更高的频段、更宽的带宽和更大的信道容量三个方向发展。导航卫星采用Ka 和V频段星间链路有明显的优点:1)符合国际电联频率使用规范,可申请、受保护;2)可用带宽宽,约20GHz,是低频可用频段的100倍,通信容量大;3)大气对该频段无线电波吸收能力强,不易受地面干扰;4)天线波束窄,具有很强的抗干扰特性;5)波长小,射频设备尺寸小和重量轻,易于星载使用;6)受等离子体影响较小,可以单频测距且星间测量精度高。虽然在Ka 及其以上频段的研制基础相对较低频段要薄弱,而且还将面临窄波束带来的工程实施难题,但是高频段星间链路是空间无线电技术的发展方向,也能更好满足系统对星间链路的需求。

表2 国外星间链路典型频段Table2 Representative frequency of worldwide inter-satellite links
4 星间天线与卫星总体的联合设计是工程实现的关键
导航星座星间链路的设计与卫星总体设计是密不可分的,尤其对于窄波束体制的星间链路而言。星间天线与卫星总体的联合设计将是工程实现的关键。
1)星间链路天线与星座网络拓扑的联合设计
全球卫星导航系统一般都是中高度地球轨道(MEO)星座,其中GPS系统6个轨道面,每个轨道面有4颗卫星,GLON ASS系统采用3个轨道面,每个轨道面需要8颗卫星,Galileo系统3个轨道面,每个轨道面9颗卫星,我国Compass系统也包含有多颗MEO卫星组成的全球导航星座。
在GPS 现有的UHF频段星间链路系统中采用时分多址的方式,每个时刻只有1颗卫星发送广播数据或测距信息,拓扑简单,星间链路天线的内外张角与拓扑的互相约束也较为简单。如果全球卫星导航系统采用高频段的窄波束天线,每颗卫星将有多个窄波束天线,这时星间链路天线与网络拓扑关系复杂,需要总体设计解决。
星座网络拓扑的设计将紧密围绕星间链路通信与定轨功能需求,同时又受到星间链路天线工程实施的约束。星座网络拓扑的确定又将对天线的某些指标提出需求,比如增益、波束宽度、扫描角度和扫描速度等。
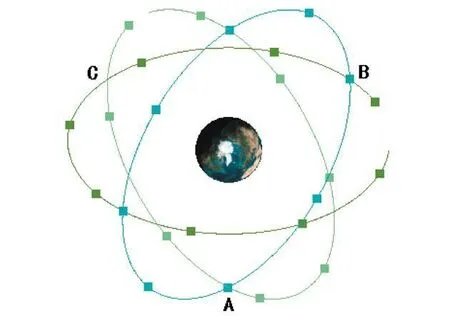
图1 标准的Walker(24/3/2)导航星座Fig.1 Constellation of Walker(24/3/2)
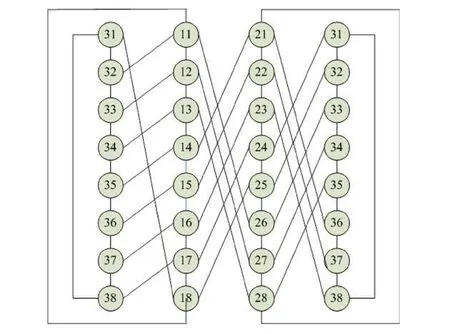
图2 星间链路连接关系Fig.2 Atopology of crosslinks
举一个例子来说明天线扫描角度与星座网络拓扑的约束关系。图1是标准的Walker 24/3/2 星座构型图,假设异轨道面之间的星间链路天线扫描角度限制在±60°,可以通过简单的仿真分析(见图3和图4,为软件仿真所得)得到卫星11(即第一轨道面第1颗卫星)与异轨道面卫星的可见时间,如果需要建一个持续可见的星间链路,则卫星11 必须从卫星24、卫星37、卫星21 和卫星34 中选取建立链路。图2即是满足异轨道面星间链路天线扫描角度小于±60°、同轨道面天线扫描角度小于±70°的一个网络拓扑示意图。图2中同轨道卫星首尾相连,为便于链路清晰显示,第三轨道面画了2 列,每颗卫星均为4条窄波束天线。图3和图4的仿真结果同时也考虑了剔除地球及其周围电离层以后的可见性。
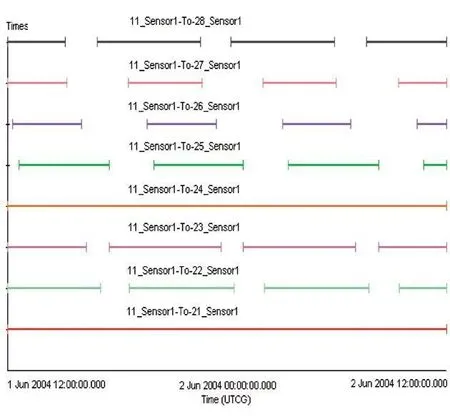
图3 卫星11 相对卫星2j 的天线间可见性(计算机仿真图)Fig.3 Antenna visibility between satellite 11 and satellite 2j(by computer simulation)
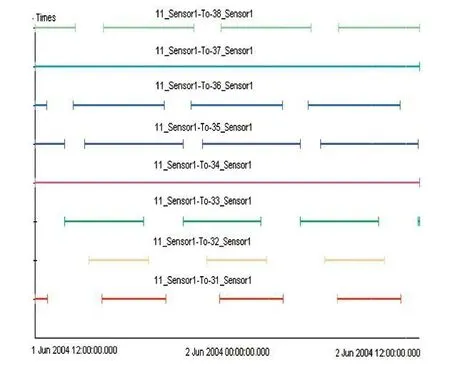
图4 卫星11 相对卫星3k 的天线间可见性(计算机仿真图)Fig.4 Antenna visibility between satellite 11 and satellite 3k(by computer simulation)
该例中,如果增加星间链路天线的扫描范围,卫星11 与异轨道面可见卫星数目将增加,固定连接的网络拓扑将有更多的选择。同样,如果天线的扫描范围很小,则图2的网络拓扑将可能在整个周期内无法持续建立链路。对于需要建立动态网络拓扑的情况,星间天线的扫描范围同样影响拓扑的建立,反之网络拓扑对星间天线的扫描范围有一定的要求。星间链路天线的其它多个指标也与网络拓扑有着密切的相互约束关系,在此不再一一举例说明。
因此,星间链路天线的设计必须紧密结合星座网络拓扑的设计,而且星座网络的设计也离不开星间链路天线的约束条件。
2)星间链路天线与总装布局的迭代设计
不管是地面电性卫星还是在轨验证卫星和正样卫星,其星间链路硬件设备最终将装载在卫星上,而在星间链路设备中与卫星总装布局关系最为密切的就是星间链路天线。无论何种类型的导航卫星平台,卫星对地板上的空间一般都是有限的。在有限的空间里,除安装星间链路天线外,还需要安装导航有效载荷天线、功率增强天线、测控天线和其它必须安装的设备等。不同类型的天线安装在舱板上需要综合考虑仿真分析视场角遮挡、星间链路天线互相干扰以及其它设备对无线电信号的反射等情况。
为了便于说明天线安装与整个卫星布局的关系,我们画一个简单的示意图。图5在卫星对地板上仅画出星间链路天线、搜救天线和导航有效载荷天线。红色区域是星间链路天线波束视场范围,黄色区域是有效载荷天线的视场范围,粉红色区域是搜救天线的视场范围。图中星间链路天线是在极限旋转角度情况下的视场。显然,多种设备在卫星对地板上如何布局与视场是否遮挡有着密切的关系,在设计中还要考虑收拢状态,星间链路天线需要与卫星布局反复多次迭代设计。
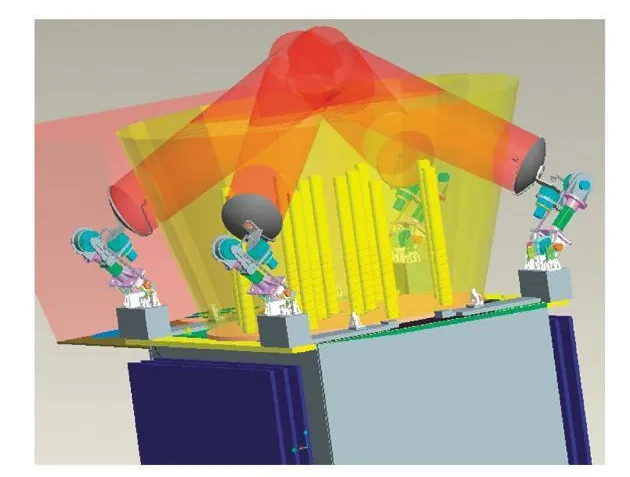
图5 极限位置下星间链路天线视场遮挡情况Fig.5 Antenna visual angle of utmost position
因此,卫星平台选型确定后对星间链路天线的构型、尺寸、波束宽度等元素将有一个约束,卫星总体设计与星间链路天线设计存在耦合和迭代关系。
3)星间链路天线与卫星姿态的联合控制
为了保证太阳电池翼对日定向,导航星座卫星在轨道运行过程中需要对偏航角进行实时机动控制,偏航角变换范围可达180°。对于卫星来说,太阳高度角不同,其偏航角度也相差较大。一年中有两次太阳高度角很小的时候,卫星在轨道面内运行其偏航角达到最大。星间链路采用窄波束天线时,需要对卫星姿态进行高精度控制与测量,并实时将测量角度传输给天线控制系统。在星间链路天线转动过程中对卫星姿态产生扰动,由于波束角很窄,为了保证精确指向,需要研究联合控制技术。
利用卫星高精度星历数据,星间链路天线与卫星姿态的联合控制技术可以保证开环星间链路高精度对准。
5 星间网络协议的灵活性有利于多种功能的实现
导航星座的星间链路承担着辅助地面精密定轨、增加星历注入频度、增强卫星测控管理和支持卫星自主运行等多种功能,这就决定了星间链路有多种工作模式和多种数据类型。
导航星座网络是一种特殊的无线网络,与地面其它无线网络相比有4个显著特点:1)网络节点之间距离远;2)网络节点数目少;3)节点之间不仅传输数据,还要进行测距;4)网络可维修性差。导航星间网络的这4个特点和导航星间链路的多种功能,决定了导航星间网络需要采取一种灵活的网络协议,以便于满足星载灵活组网和空间高可靠性的需求。
国际标准化组织(ISO)开发的开放系统互连(OSI)参考模型将基本的通信功能分成7层,分别为应用层、表示层、会话层、传输层、网络层、数据链路层和物理层[10]。对于星间无线网络,应该尽量简化其参考模型并适当修改满足测距功能需求,图6给出了一个导航星间无线网络建议的协议分层,包括5层协议。导航星间网络协议的灵活性不仅体现在应用层,还体现在网络层等其它几个分层上。
导航星间网络协议的应用层,将直接面对星间链路的实际应用。虽然星间链路仅承担星间测距与星间数据传输功能,但是在星间链路上需要传输的数据来源有很多种,而且每一种对业务质量(QoS)的要求又不尽相同。比如,遥控指令要求误码率小于10-8,且地面发出指令到执行该指令的目的卫星之间通信延迟要求不得小于600ms;而卫星遥测参数下传地面误码率仅要求达到10-6,甚至更差即可,通信延迟要求100s,显然在应用层设计时需要具有针对性和灵活性。
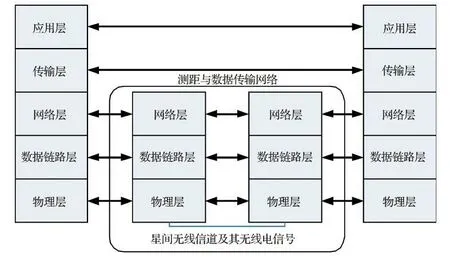
图6 导航星间无线网络协议分层建议Fig.6 Suggestion of layered protocol betw een navigation satellites
网络层的设计同样需要灵活性。导航卫星在轨运行,难免某个时刻某颗卫星发生小的短暂故障或者更严重的故障,这时网络层中的路由算法就得需要具备一定的抗毁能力,如果设置成固定路由,则许多有用数据将无法通过中断的链路到达目的卫星。
跨层设计是近年来研究的一项新技术,它是指多层协议之间不像以前那样接口定义清楚后独立设计,而是在协议的两层或者更多层之间展开联合设计,这样将能获取全局最优的网络性能,同时跨层设计也为协议的灵活性注入新的元素和契机。最常见的一种跨层设计就是数据链路层与网络层的联合设计,可变速率编码、网络编码等新技术可以为网络协议设计增加灵活性,为不同类型数据提供不同的业务质量。
6 采用状态一致的星间链路设备有利于长期可持续运行
导航卫星系统与其它类型卫星的一个重要区别,就是卫星数目多,且每一颗卫星都要加入到星座中组网。全球卫星导航系统的最终性能不仅决定于单颗卫星的性能,而且还决定于星座组网用户的几何精度因子。
导航星座一般采用Walker 星座或者Walker星座的变形,不管是何种星座,均存在第一颗卫星发射到某轨道的某位置处,其同轨道和异轨道导航卫星的相位均确定,不同相位处卫星的发射时间已经基本确定。然而,导航卫星在研制过程中,每颗卫星的研制进度很难与发射顺序完全匹配,此时希望每颗卫星的状态是一致的或者至少是分批一致的。
导航星座正样卫星组网成功后,还需要在轨备份卫星和地面存储备份卫星,但是在轨备份卫星的数目是有限的,按照惯例至多每个轨道面备份1颗卫星,这就需要该颗卫星可以替代该轨道面内任意1颗运行卫星。地面存储备份的卫星数目也是有限的,需要存储备份的卫星最好可以替代星座中所有轨道中任意1颗卫星。
针对星座组网和备份的需求,导航星间链路设备也要具备灵活可变的特点。对于星间链路硬件设备来说,主要就是星间频率配置问题。如果采用收发分时方案,所有的星间链路中心频率可以采用同样的一个频点,易于做到星间链路设备状态一致。如果采用收发同时进行的模式,某颗卫星的星间发射频率和接收频率是不同的,这样相互连接的两颗卫星在轨工作后的收发频率是互补的。在星间收发频率配置方案中,还需要考虑星间天线互相干扰问题以及星座网络拓扑问题。星间链路设备作为卫星系统的重要设备,其状态直接决定卫星状态。
因此,采用状态一致的星间链路设备是星座持续运行的保证。
7 总结与展望
建立星间链路系统是GNSS的发展趋势,也是建设GNSS的难点与关键技术,当前各大GNSS 都在建设或规划着自己的星间链路已经是不争的事实。本文依据GNSS的特点,开展了导航星座星间链路技术的发展战略研究,提出了建设星间链路的几点建议。
要建设一个可工程实施、高性能且技术先进的导航星座星间链路绝非易事,需要星间链路与卫星系统的各个层面开展更多的研究。展望未来,希望国内能够尽早开展以下几方面的研究,并早日应用到实际工程系统中。
1)提高导航卫星姿态的控制精度与测量精度;
2)加强星间链路天线的旋转机构可靠性研究;
3)开展联合定轨和自主定轨对星间网络拓扑的需求研究。
References)
[1]杨宁虎,陈力.卫星导航系统星间链路分析[J].全球定位系统,2007,32(2)
[2]杨宁虎,陈力.卫星导航系统星间链路空间参数与覆盖分析[J].飞行器测控学报,2007,26(1)
[3]李振东,何善宝,刘崇华.导航星座星间网络路由算法研究[C]// 北京:第一届中国卫星导航学术年会,2010
[4]李振东,何善宝,刘崇华.导航星座的一种动态连接网络拓扑结构[C]// 北海:中国航天科技集团公司卫星有效载荷技术学术会议,2009
[5]李振东,何善宝,刘崇华.采用Ka频段的导航星座网络静态拓扑结构[C]// 北京:中国宇航学会学术年会,2009
[6]何家富,姜勇,张更新,等.一种具有异轨星间链路的Walker 星座网络拓扑与路由生成方案[J].解放军理工大学学报,2009,10(5)
[7]郑晋军,林益明,陈忠贵,等.GPS 星间链路技术及自主导航算法分析[J].航天器工程,2009,18(2)
[8]何善宝,李振东,刘崇华.星间网络拓扑的二分图及其关联矩阵表示法[J].航天器工程,2009,18(4)
[9]张更新,张杭.卫星移动通信系统[M].北京:人民邮电出版社,2001
[10]Alberto L G,Indra W.通信网:基本概念与主体结构[M].乐正友,译.清华大学出版社,2003
