利用三维激光扫描数据求取开采沉陷预计参数研究*
2010-12-23于启升郑汝育
于启升,吴 侃,郑汝育
(中国矿业大学环境与测绘学院,江苏徐州 221008)
利用三维激光扫描数据求取开采沉陷预计参数研究*
于启升,吴 侃,郑汝育
(中国矿业大学环境与测绘学院,江苏徐州 221008)
三维激光扫描技术是一种新兴的测绘技术,它具有快速、实时、高效等优点,突破了传统测绘手段的局限性,可以直接获取三维坐标,目前正被广泛应用于测绘各个领域。为此 ,研究三维激光扫描仪数据应用于地表沉陷参数求取问题,针对其特点,利用VB6.0语言,采用模矢法编制了概率积分法求参程序,并将程序应用于实际求参,实践证明,效果较好。
三维激光扫描;数据;观测站;沉陷监测;概率积分参数;精度
0 引言
开采沉陷预计参数是开采沉陷预计的基础,其取值的准确性决定了地表移动变形的预计精度。开采沉陷预计参数的影响因素主要有:覆岩的岩性和地层结构、采深、采厚等[1]。每个矿区由于地质采矿条件的差异开采沉陷预计参数不一样,而以实测资料反演的参数最为精确可靠。
现有的求参方法包括利用特征点求参、曲线拟合求参、正交试验设计法求参等,这些常规的求参方法需要获得观测站的最终下沉值,且点数较少,受实测误差影响较大。
1 数据获取及数据准备
1.1 数据获取
1)在已知的测点上架设仪器,对中整平,将扫描仪和笔记本连接,启动 PointScape数据采集软件,打开扫描仪电源,建立扫描仪与笔记本的通讯。精平仪器后,量测仪器高,输入气象、气温状态参数及站点信息。
2)定向。精扫后视控制点上的标靶,确定扫描的初始计算方向,可采用单点或多点后视。
3)扫描。扫描过程由 PointScape软件控制,通过集成的数码相机拍摄扫描对象的影像,在影像上选择扫描区域,扫描仪根据软件环境中设置的参数 (行、列数和扫描的分辨率等)进行单点或物体扫描,同时可以进行球形扫描并根据点云数据实时拟合出球体。
1.2 数据准备
1)点云拼接。由于采用的是基于实体的点云剔除方法,所以首先要将不同测站扫描得到的点云拼接到一起。如果不是全站式的或扫描的时候没有测定坐标,首先应该进行点云拼接。
2)粗差剔除。对于比较明显且容易删除的干扰地物,要首先进行人工裁剪,以免对后面的粗差剔除进行干扰,并且可以减少数据量,方便处理。切割后将数据导出,格式为 x,y,z[2]。
3)重采样。由于扫描时点云的密度不一样,所以需要对点云数据进行重采样,使数据均匀分布。本文中数据重采样密度为 4~6 m。
经过预处理的两次测量数据,用第一次测得数据点的高程减去第二次测得数据相应点的高程,即得到了该点的此阶段下沉值。
英语口语能力的提高受语言环境、学习动机、词汇量、思辨能力、交际策略等多种因素的制约。英语教学中,教师应激发学习者的囗语学习动机,采用多种训练方式为学习者提供提升口语表达能力的平台,学习者也应珍惜口语训练的机会,掌握技巧,学会运用有效交际策略,从而全面提升高中生的跨文化交际能力。
2 求参模型
2.1 预计参数
表 1为运算的参数及其在程序中的符号。分别按照对下沉值的影响大小排序。

表1 参数选取列表Tab.1 Parameter selection table
2.2 预计模型
概率积分法是因其所用的移动和变形预计公式中含有概率积分(或其导数)而得名。由于这种方法的基础是随机介质理论,所以又叫随机介质理论法[3]。应用概率积分的相关参数可以进行开采沉陷预计,这一模型在矿山开采沉陷中应用最广,处理数据时用该模型作为基础。
移动盆地内任意点的下沉值计算公式为[3]:

式中:w(x,y)表示地表任意点下沉值;w0表示地表移动盆地最大下沉值;wx,wy分别表示倾 (走)向半无限开采时走 (倾)向主断面上任意点的下沉值;L表示走向长度;l表示走向计算长度;D表示倾向长度;d表示倾向计算长度;α表示煤层倾角;h1表示煤层下山采深;h2表示煤层上山采深;h表示煤层平均采深。
2.3 求参模型
求取地表移动变形参数可以采用牛顿法、拟牛顿法、模矢法[4]等方法,考虑到模矢法求参有可靠的理论基础,且比较简单,收敛速度较快,能达到精度要求等,本文采用模矢法进行求参,在求参程序中建立的误差函数为:

式中:εB表示求参的拟合中误差;n表示参与求参点的个数;wB表示软件中计算得到的下沉值;w实表示实测下沉值。
步长选择为参数初值的 5%,即步长 =参数初值 ×5%,开采影响传播角的步长选择 0.5°。
3 实例及影响求参精度的因素分析
该实验以兖州煤业股份有限公司鲍店煤矿 103上02工作面为例进行了动态参数求取。
该工作面煤层厚度 5.84 m,煤层倾角α =3.4°,平均采深 H=470 m,工作面推进速度约为 6m/d,扫描面积S约为20000m2。
通过运行程序即得到最优参数值为 [0.639 461 9,1.673 742,87.8°,-34,-26,60,0.26]。
3.1 求参点个数对求参精度的影响
针对以上实际问题,进行了求参点个数对求参结果的影响实验 (见表 2),主要从运行时间和运行结果的稳定性来研究。对该表中数据的点个数和拟合中误差两栏数据进行分析,并通过 Excel绘制散点图,如图 1所示。图 1中横坐标为求参点个数,纵坐标为拟合中误差值。

图1 求参点个数对拟合中误差的影响Fig.1 The point number's impact on the fittingmean square error
由表 2和图 1可以看出:当求参点个数达到 600时,拟合中误差已经接近最优值;点数超过 600时,拟合中误差趋于稳定。但是点数越多,求参软件运行时间越长,所以综合各方面因素,得到求参点个数在 600~900时是最佳的求参密度。进一步得到求参点个数与扫描面积和平均采深之间的函数表达式:

式中:k取值范围为[14.10,21.15];n表示求参点个数;S表示扫描面积;H表示平均采深。
3.2 参数初值选取对求参结果的影响
本文主要针对不同参数初值对求参结果的稳定性和拟合中误差的大小进行研究,研究结果,见表 3,研究中迭代次数都为30次。

表2 求参点个数对参数稳定性的影响Tab.2 The point number's impact on the stability of the parameters
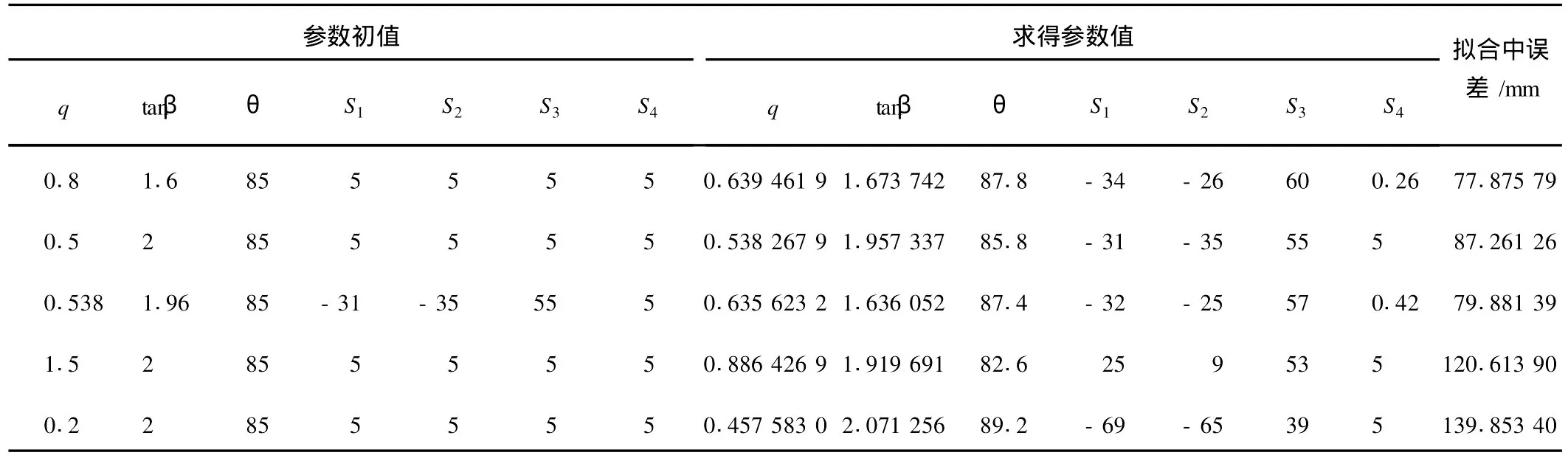
表3 参数初值对求参精度的影响Tab.3 The initial parameters'impact on the accuracy of the parameters
分析表 3中数据可知,当参数初值与实际相差较大时,得到的最优参数结果不稳定,误差较大。分析表中第 4行与第 5行,把第 4行求取的参数作为初值再次计算,即可得到比较接近于最优参数值的计算结果,但是迭代次数较多,收敛速度较慢,运行时间长。所以参数初值的选取应与实际参数相差较小以提高运算速度,进一步提高参数精度。
4 结论
采用三维激光扫描仪对开采引起的地表沉陷进行观测,可以得到整个区域的下沉值,即可得到整个监测区域的移动变形情况。
求参软件是建立在预计软件的基础之上,使用模矢法进行求参,它是一种非线性最优值的求解方法,该方法有可靠的理论基础,可以求得动态开采过程中的动态地表移动参数。
求参时应该选取比较接近实际的初值进行求参计算以提高运算速度。最终得到求参点个数与扫描面积和平均采深之间的函数关系为 n=k*S/H,k的取值范围为[14.10,21.15]。
[1]邹友峰.开采沉陷预计参数的确定方法[J].焦作工学院学报:自然科学版,2001,20(4):253~257.
[2]白志辉,张舒,王响雷,等.三维激光扫描点云粗差剔除方法研究[J].矿山测量,2009(2):13~15.
[3]何国清,杨伦,凌赓娣.矿山开采沉陷学[M].徐州:中国矿业大学出版社,1994.
[4]吴侃,周鸣.矿区沉陷预测预报系统 [M].徐州:中国矿业大学出版社,1999.
Mining Subsidence Prediction Parameters Acquiring with 3D Laser Scanning Data
YU Qi-sheng,WU Kan,Zheng Ru-yu
(School of Environment Science and Spatial Information,China University of Mining&Technology,Xuzhou Jiangsu 221008,China)
As newly emerged technology,3D laser scanning bears the advantagesof high-speed,real time,high-efficiency,et al.Compared with traditional survey methods,it can acquire the 3D coordinates of objects directly and has been widely applied in various fields.This article studies mainly on acquiring mining subsidence prediction parameters with 3D laser scanning data.According to the characteristic,an acquiring program based on Pattern Search,method has been developed with VB6.0.The application of this program in real project proves its better efficiency.
3D laser scanning;data;observation station;subsidence monitoring;probability-integral parameters;precision
TD 173+.4
A
1007-9394(2010)02-0001-03
2010-02-07
国家环保公益性行业科研专项经费资助(200809128)
于启升 (1987~),男,山东临沂人,硕士研究生,主要从事三维激光扫描、开采沉陷规律、开采损害及防护方面的研究。
