海陆两用磁力仪系统的研制
2010-12-21刘敬彪关春燕章雪挺
刘敬彪,关春燕,章雪挺
(杭州电子科技大学电子信息学院,杭州 310018)
地震灾害是群灾之首,具有突发性和难预测性,频度较高,并产生严重的次生灾害,对社会也产生很大影响。震磁观测、实验与理论研究结果以及地磁预报地震实践,都说明地磁在地震预报中可以发挥较好作用,可以监测到孕震过程中震源区与包括震源在内的区域应力场的地磁前兆异常[1]。 20世纪60 ~70年代,一些多地震国家相继将地磁方法列入国家地震预测计划,积极开展震磁前兆与地震预测研究,至今在震磁前兆及其机理研究与地磁预测地震试验等方面均已获得了有意义的科研成果[2]。针对震磁前兆信息地磁总强度以及地磁各分量异常,研制了海陆两用磁力仪系统,能监测微弱地磁的三分量变化情况,可应用于陆地地震台基站以及海底地磁的测量,为震磁前兆研究提供宝贵资料。
1 磁力仪系统架构
地磁观测的任务是准确地记录地磁场的各种时间变化和空间分布规律,以捕捉变化量级小、具有区域性特征的震磁信息。地磁预报地震工作是以可靠的观测数据为基础[1]。海陆两用磁力仪系统旨在对地球磁场强度的长期观测,提供研究震磁关系以预测地震的数据资料。该磁力仪系统是基于磁阻传感器的高灵敏度磁力测量技术的三分量地磁测量仪,以低功耗MSP430微处理器为核心,加上外围各功能电路构成。
该磁力仪电路部分主要由传感器部分,信号处理部分,模数转换部分,微处理器部分,置位复位部分,多轴运动传感器(ADIS16355), SD卡存储部分以及RS232串口通信部分等组成。而应用于海洋等水下时,电路需封装于高压密封舱以承受海水的巨大压力且不渗漏,再利用铠装同轴电缆传输信号至PC机,整个系统架构如图1。

图1 海陆两用磁力仪系统框架图
2 磁力仪系统硬件电路设计
2.1 硬件电路分析
传感器部分 磁力仪传感器部分采用霍尼韦尔的各向异性磁阻传感器HMC1001和HMC1002组成三分量磁阻传感器, 其磁场测量范围是 ±2 Gs(1 Gs(Gauss)=10-4T),灵敏度为 3.2 mV/(V◦Gs-1)。具有体积小、价格低、温度特性好、工作频率高等优点,特别是芯片自带有offset与set/reset功能管角,可以排除静场干扰和抵御强磁破坏[3]。对于HMC1001和HMC1002,其输出的是差分电压信号,与磁场强度和电桥电压(即传感器的工作电压)成正比[4],具体关系为:

因此在 5V供电的情况下, 传感器的输出结果为:

信号处理部分 传感器所采集的数据需经过放大和滤波的信号处理,再进行24位高精度模数转换。其中仪器放大器使用AD623,该放大器是一个集成单电源仪表放大器,能在单电源(+3 V到+12 V)下提供满电源幅度的输出, 输出电压为:Vo=取RG为1.5 kΩ,则Gain=67.67。
由于地磁场变化缓慢,有用的磁信号均为低频信号,且频率集中在1 kHz以内。需要对信号进行滤波,以去除高频噪声信号。电路采用巴特沃思低通滤波器,巴特沃思滤波器的特点是通频带内的频率响应曲线最大限度平坦,没有起伏,而在阻频带则逐渐下降为零[6]。选用5阶的MAX7410低通滤波器。该滤波器为单电源供电,截止频率范围为1-15 kHz,功耗低,源电流仅 1.2 mA。可使用内部晶振,频率为fOSC(kHz)=30×103/Cosc(pF),设计时尽量减少寄生电容,防止影响内部振荡器频率。不同的速率内部振荡器来调整滤波器的截止频率,两者关系为100∶1。因此试验中选择电容值300 PF, fOSC(kHz)=100 kHz,fc=fCLK/100=1 kHz。
AD转换部分 模数转换器采用24 bit高精度的ADS1256,由四阶Δ-Σ调制器和一个可编程数字滤波器组成,具有无噪声精度、数据速率以及多种功能。ADS1256在实际应用时,注意电源和地的布线。在模拟电源和数字电源的输入端一般要并联一个小的陶瓷电容和一个大的钽电容(或者陶瓷电容),注意电容要尽量靠近输入端,而且应使小电容更靠近ADC。特别注意要为VRefN和VRefP提供干净的电源[5]。
置位和复位电路
置位和复位控制,消除过去磁历史的影响,把磁阻传感器恢复到测量磁场的高灵敏度状态。其连接电路如图2。
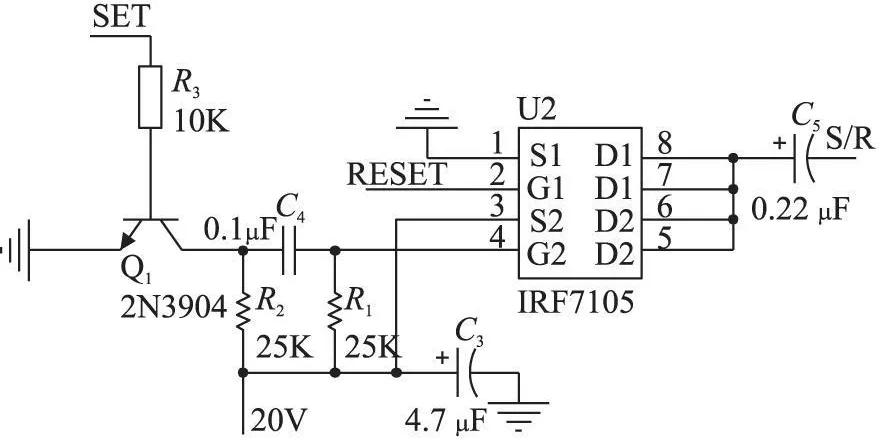
图2 传感器置位/复位电路
ADIS16355 ADIS16355 是一组多轴动作传感器,以具成本效益的方式将陀螺仪(Gyroscope)和振动加速度计(Accelerometers)加以结合,以便测量全部6组可能的机械性自由度(6DOF)——在X、Y与Z轴上的线性移动以及绕着X、Y与Z轴的旋转动作。该传感器包涵AD公司微机械和混合信息处理技术,是一个高度集成的解决方案,内置嵌入式处理器用于传感器校准与调谐,提供校准后的数字惯性感应,并在温度范围内对偏移与灵敏度进行了校准[6]。ADIS16355具有可以编程的串联式外围接口(SPI)端口,能够对滤波、取样速率、电源管理、自我测试、以及传感器条件状态和警示等的编程特点提供简单的存取。
SD卡存储部分 磁力仪电路设有SD卡存储部分,当磁力仪实施监测地磁变化时,所得数据将存储于SD卡中,以便于操作人员随时查看地磁强度的历史数据,该SD卡存储容量可达4G。
2.2 海用磁力仪高压密封舱的应用
海用磁力仪主系统需置于高压密封舱,以使电路密封不渗漏。水下电路采用电池供电,经由几千米的铠装同轴缆线使水下系统与海洋基站互连,实现实时通信工作方式。主系统通过各向异性磁阻传感器实现地磁三分量测量,通过惯性传感器实现水下姿态判断与坐标系变换,通过大容量数据存储实现系统自容工作方式。
2.3 磁力仪姿态计算
在姿态计算中主要涉及三个坐标系,地球坐标系、地理坐标系和仪器坐标系。研究物体的运动时,考虑到惯性的敏感性和惯性系统的理学问题,通常将相对恒星所确定的参考坐标系称为惯性空间,空间中静止或匀速直线运动的参考坐标系称为地球坐标系(E系)[7]。对于研究地球表面附近运载体的导航定位问题,地球坐标系的原点通常取在地心。地理坐标系(T系),即正东(X)、正北(Y)、地垂向上(Z),不同经纬度坐标系不同,地球的转动使得地理坐标系相对地球坐标系有转动,它是运载体为原点。固连在设备载体上的坐标系为仪器坐标系(B系),它与磁力仪的X、Y、Z轴完全吻合。实际上,在导航定位中,运载体相对地球的位置通常不用它在地球坐标系中的直角坐标来表示,而是用经度λ、纬度φ和高度h(这里所指的是磁力仪的工作水深)来表示。图2 表示了各坐标系的转换关系。
当磁力仪在近海底中工作时,磁力仪相对地球的位置不断发生改变,而地球上不同地点的地理坐标系,其相对地球的坐标系的角位置是不相同的。也就是说,磁力仪相对地球移运动将引起地理坐标系相对地球坐标系转动[4]。
由于设计的海用磁力仪工作于海底,磁场的总场值变化将受姿态的影响。因此,磁力仪的姿态数据(磁力仪载体的航向角γ,俯仰角θ和滚转角γ)不可或缺。姿态数据可通过基于MEMS技术的惯性测量单元(IMU)获得。
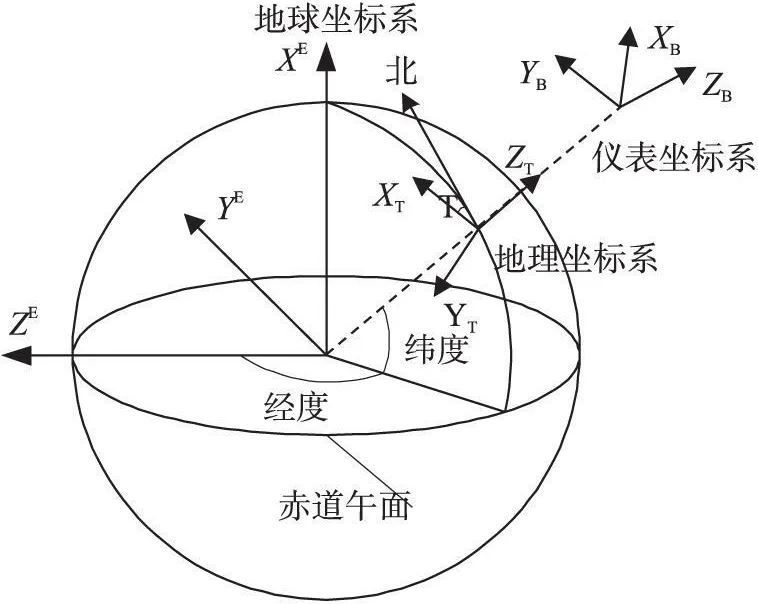
图3 坐标系统间的转换
最后,可以根据(HX-BHY-BHZ-B)和载体的航向角φ,俯仰角θ和滚转角γ求得在地平坐标系中磁场值(HX-THY-THZ-T)。令:
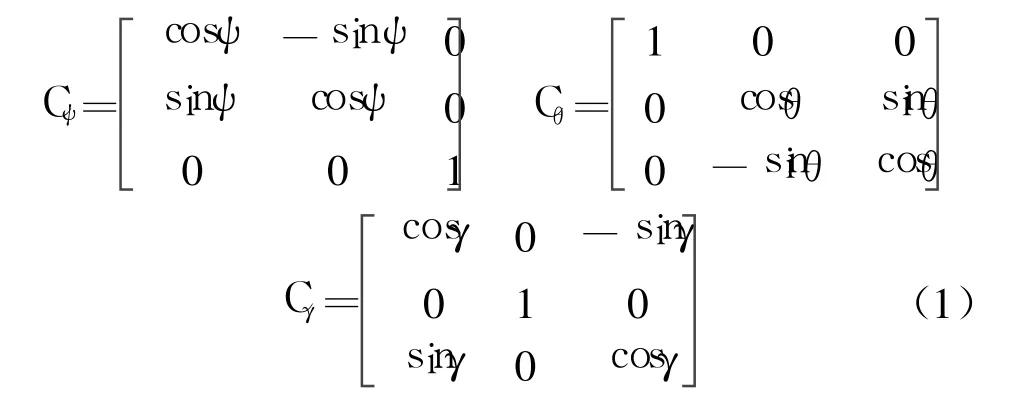
可得:

3 磁力仪与上位机通信系统
磁力仪上位机软件设计主要基于Visual C++应用程序开发工具。包括样本数据显示,连接设置,文件存储,校时以及系统复位等功能。其中数据分别以数字和图表显示形式,显示范围可调。连接设置主要完成波特率,站位号,采样周期等参数设置。另外包括复位下位机系统,校正下位机日期和时间,接收和删除磁力仪所采集的数据等功能。其上位机与磁力仪下位机通信流程如图4和图5。
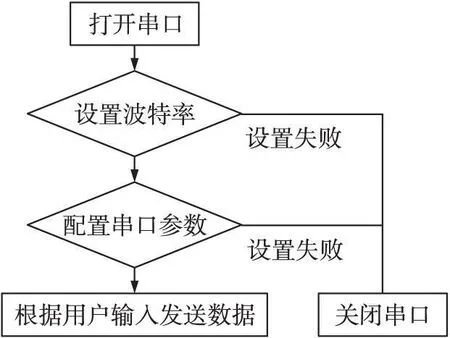
图4 上位机串口通信发送端
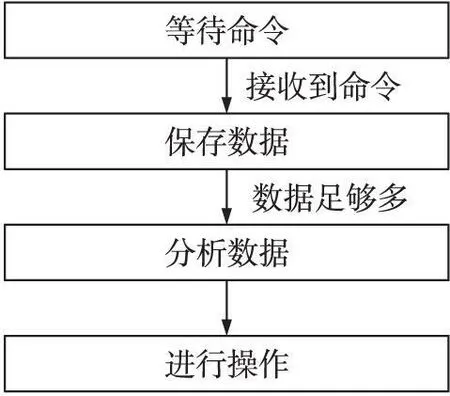
图5 下位机磁力仪接收端
其中部分程序:
void CSD_Contrl_PannelDlg::OnMyMessage
(WPARAM wparam, LPARAM lparam)
{
uint32 Event=(uint32)wparam;
POSITION pos=m_FileList.GetFirstSelected
ItemPosition().TIF;Switch(Event)
{
case CMD_RST_SYS:AfxMessageBox("系统已
成功复位! 请重新建立连接!");
OnOpencom();
break;
case CMD_SET_PARA:AfxMessageBox("参数
设置成功!");break;
case CMD_SET_TIME_AND_DATA:AfxMes
sageBox("校时成功!");break;
case CMD_DEL_FILE:m_FileList.DeleteItem
(DelItemNum);
AfxMessageBox("文件删除成功!");break;
default:break;
}
}……
GetDlgItem(IDC_BtnConnect)->SetWindow
Text("连接");
GetDlgItem(ID_OPENCOM)->SetWindowText
("打开串口");
p
dlg->GetDlgItem(IDC_BtnConnect)->
SetWindowText("已连接");
pdlg->GetDlgItem(IDC_XData)->SetWin
dowText(tXData);
pdlg->GetDlgItem(IDC_YData)->SetWin
dowText(tYData);
pdlg->GetDlgItem(IDC_ZData)->SetWin
dowText(tZData);
pdlg->GetDlgItem(IDC_CaptureTime)->
SetWindowText(tTime);
double all=sqrt(x1*x1 +y1*y1 +z1*z1);
4 磁力仪系统调试
该磁力仪具有低功耗、高精度、存储量大、测量范围宽、抗干扰能力强、工作时间长、实时观测等优势。所达到的技术指标为:测量范围0 ~200 000 nT,灵敏度<0.67 nT;连续工作时间陆地3 mon,海底20 d;自容式存储模块指标:最大数据空间4 G,最小采集间隔1 s。实时通信模块指标:通信最高速率115 200 bps,通信误码率≤10-6;水下嵌入式系统功耗≤15 W;可水下工作深度0 ~3 000 m。地球磁场在无干扰情况下, 地球磁场强度非常微弱, 约为0.3-0.6×10-4T。在实验室实验过程,首先在无干扰情况下测得地球磁场三分量数值以及磁场总强度为38 399 nT,监测显示结果如图6。人体具有微弱磁性,图7为显示实验中人数次靠近和远离磁力仪引起磁力强度异常波动。
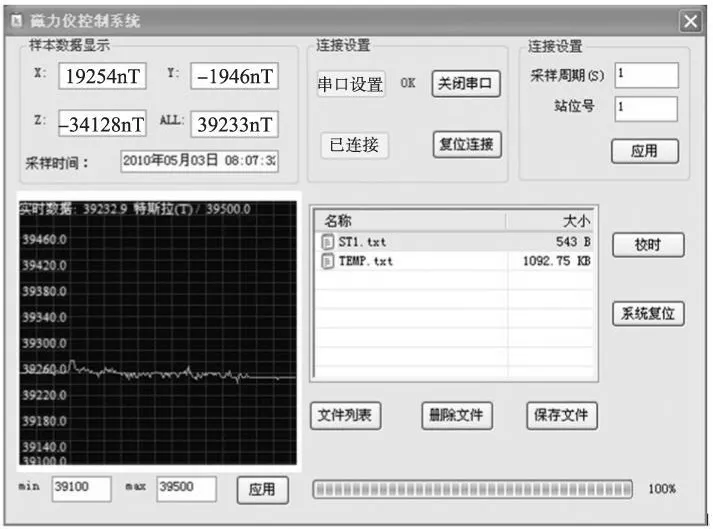
图6 无异常时地球磁场强度
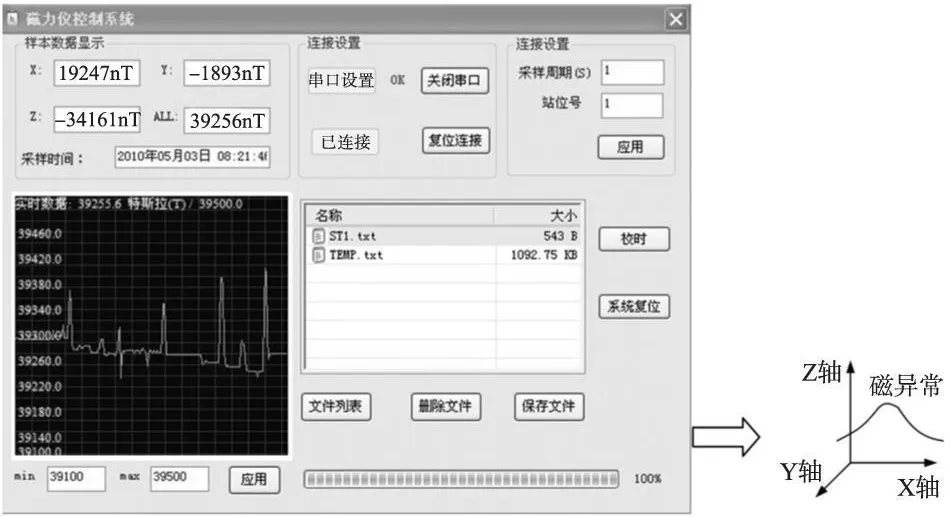
图7 磁场强度显示异常波动
5 结论
该海陆两用磁力仪系统将采集的地磁变化信息经过处理、转换、传输和保存,以数据和图线的形式直观地显示地磁三分量及其总强度。震磁前兆显示由强地震引起的磁异常可能分布在较小范围内,而且异常能否捕捉到与观测点的位置有一定关系,这就要求地磁台站在空间分布上应有一定的密度[8]。为全面了解震磁异常的时间过程,研究它们的形态规律,提取更加丰富的信息,实行长期连续观测。
[ 1] 林云芳.我国震磁关系研究的新进展[ J].地震, 1990, 6:26-34.
[ 2] 詹志佳,赵从利,高金田,等.北京地区震磁研究的进展与展望[J].地震, 2002, 22:49-54.
[ 3] 乔建忠,李艳,文丰.一种各向异性磁阻传感器在车辆探测中的应用木[ J] .传感器与微系统, 2009, 28(5):106-108.
[ 4] 黄孔耀,章雪挺,周巧娣,等.近海底三分量磁力仪的电子系统设计[ J] .仪表技术与传感器, 2009, 7:26-29.
[ 5] 周超,李春茂.新型8通道24位△一∑型模数转换器ADS1256的原理及应用[J] .国外电子元器件, 2005, 6:35-38.
[ 6] 黄孔耀.近海底三分量地磁测量技术的研究与实现[ D].杭州电子科技大学硕士学位论文, 2008:17.
[ 7] 杨艳娟.捷联惯性导航系统关键技术研究[ D] .哈尔滨工程大学博士学位论文, 2001:6.
[ 8] 彭纯一,徐国铭,庄明龙,等.地磁垂直分量震磁异常[ J].中国地震, 1990, 6(3):20-28.