自升式平台齿轮齿条升降系统受力分析
2010-12-11樊敦秋崔希君曹宇光
樊敦秋,崔希君,曹宇光,2
(1.胜利石油管理局钻井工艺研究院,山东东营,257017;
2.中国石油大学(华东)储运与建筑工程学院,山东东营,257061) *
自升式平台齿轮齿条升降系统受力分析
樊敦秋1,崔希君1,曹宇光1,2
(1.胜利石油管理局钻井工艺研究院,山东东营,257017;
2.中国石油大学(华东)储运与建筑工程学院,山东东营,257061)*
齿轮齿条升降机构是自升式平台的重要承载机构,在各种工作状态下起到支撑船体及相关设备的作用,并长时间承受重外载荷作用。以三桩腿齿轮齿条升降式自升式平台为模型,从桩腿内力分析出发,研究齿轮齿条升降机构受力,从而为升降单元安全评价、寿命评估等提供支持。
自升式平台;升降单元;受力分析
自升式钻井平台在经历半个多世纪的发展后,在工作水深、抗风暴能力、可变载荷、钻井能力和操作性能等方面取得了巨大进步[1-5]。自升式平台由于具有用钢量少、造价低、水上完井及在各种海况下几乎都能持续作业和效率高等优点,在国内外海洋勘探和开发、特别是在近海海洋石油开发中发挥了巨大作用[6]。
升降系统(如图1所示)作为自升式平台中的关键部分及重要的承载部件,在工作状态、升降状态及风暴自存状态等多种工况下都必须支撑船体及相关设备,并承担外载荷,长时间处于承受重载的状态,因此其强度是关系整个平台安全性能的一个重要因素,在平台的设计制造中历来受到高度重视。常见的升降系统有齿轮齿条式和液压顶升式。齿轮齿条式升降系统由于具备升降速度快、操作简单、易对井位等突出优点,因此在新造的自升式平台中被广泛采用[7]。齿轮齿条式升降系统一般由多个升降单元构成,均匀分布在各桩腿两侧,升降单元数量与承载能力根据平台设计载荷来确定,平台所承受的载荷通过升降单元内的齿轮与固定于桩腿上的齿条啮合传递给桩腿,因此每条桩腿所承受的载荷亦即该桩腿上所固定的升降单元所承受的载荷。受多种因素影响,各桩腿上所承受的载荷是不均匀的。本文以目前国内广泛采用的三桩腿齿轮齿条升降式自升式平台为原型,分析各桩腿在自重、可变载荷和风载作用下的受力,以此确定各升降单元所承受的载荷及平台的倾斜角度,从而为升降系统结构安全评价、寿命评估等奠定基础。

图1 齿轮齿条升降系统
1 平台自重及可变载荷作用下受力分析
三桩腿自升式平台型长为L,型宽为B,艏桩与艉桩间距为L1,两艉桩间距为B1。建立如图2所示平面坐标系,在此坐标系下,三桩腿分别位于D(x1, y1),E(x2,0),F(x1,-y1)。
由于平台自身重力与可变载荷的合力难以保证处于各桩腿所围成多边形区域的形心,因而必然造成一定程度的偏载,使得各桩腿上齿轮齿条机构受力不均。对于本文所研究的三桩腿平台,假设其自重及可变载荷合力为 G,作用于c(xc,yc,zc)(c的坐标和合力G可通过统计分析计算),则根据平台静力平衡可知
式中,Z轴为xoy平面的法线方向;My为各力对y轴的扭矩;Mx为各力对x轴的扭矩,展开得

式中,RD、RE、RF分别为桩腿D、E、F所承受的载荷,解方程得
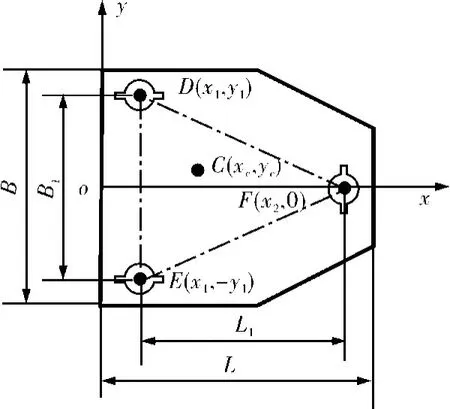
图2 三桩腿自升式平台桩腿位置
2 风载作用下受力分析
除去平台自重和可变载荷,作用于平台上的风载荷也使齿轮齿条升降系统受力增加。将平台各桩腿沿固桩架顶部和底部截开,取平台主体部分作为研究对象,如图3所示,依据规范[8]计算风载及风倾力矩即可求得上下表面的内力。需要说明的是,图4中所截取部分即为齿轮齿条发生啮合的部分。

图3 风载作用下桩腿上的内力
假设风向为水平方向(垂直于桩腿),与平台轴线成任意夹角入射,建立如图3所示坐标系,x轴方向沿着风向,y轴垂直于平台主体沿桩腿方向。内力由剪力与弯矩组成,代表平台桩腿其他部分对截取部分的作用。图4中,QS、MS代表截取部分上表面的剪力和弯矩;QX、MX代表截取部分下表面的剪力和弯矩;M为升降系统输出齿轮与齿条啮合所产生的力的竖直分量所合成的力矩;F为齿轮齿条啮合时所产生力的水平分量,考虑所截取部分的平衡,可得如下平衡方程,即

展开得

解得

将任意方向风载荷沿 u轴和v轴方向分解,其中v轴为平台轴线方向(正向与图2中 x轴方向一致),u轴为两艉桩沿线方向(正向与图2中 y轴方向相反),分别计算在风载荷沿此2方向分量作用下各桩腿上齿轮齿条升降系统上所产生的附加力。
在风载沿 u轴分量作用下,假设 D、E、F三桩腿齿轮齿条升降系统上产生的附加力分别为(如图4所示),根据受力及桩腿分布特点可列如下平衡方程,即
式中,Mv=Mcosα,求解得

图4 风载沿u轴分量作用下桩腿内力
在风载沿 v轴分量作用下,假设 D、E、F三桩腿齿轮齿条升降系统上产生的附加力分别为 F″D、F″E、F″F(如图5所示),根据受力及桩腿分布特点可列如下平衡方程,即
式中,Mu=Msinα。
求解得
综合可得2分力共同作用在齿轮齿条上所产生的附加载荷为
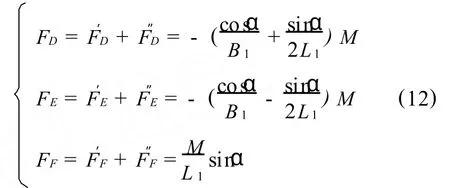
其中,正号表示齿轮齿条上的压力增加;负号表示压力减少。
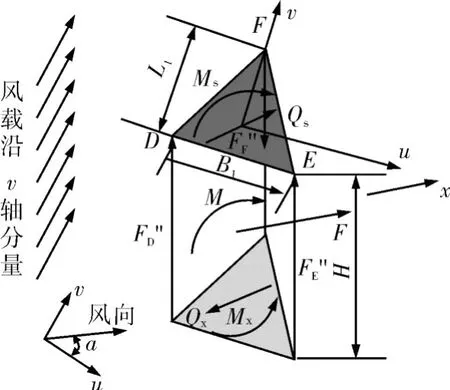
图5 风载沿v轴分量作用下桩腿内力
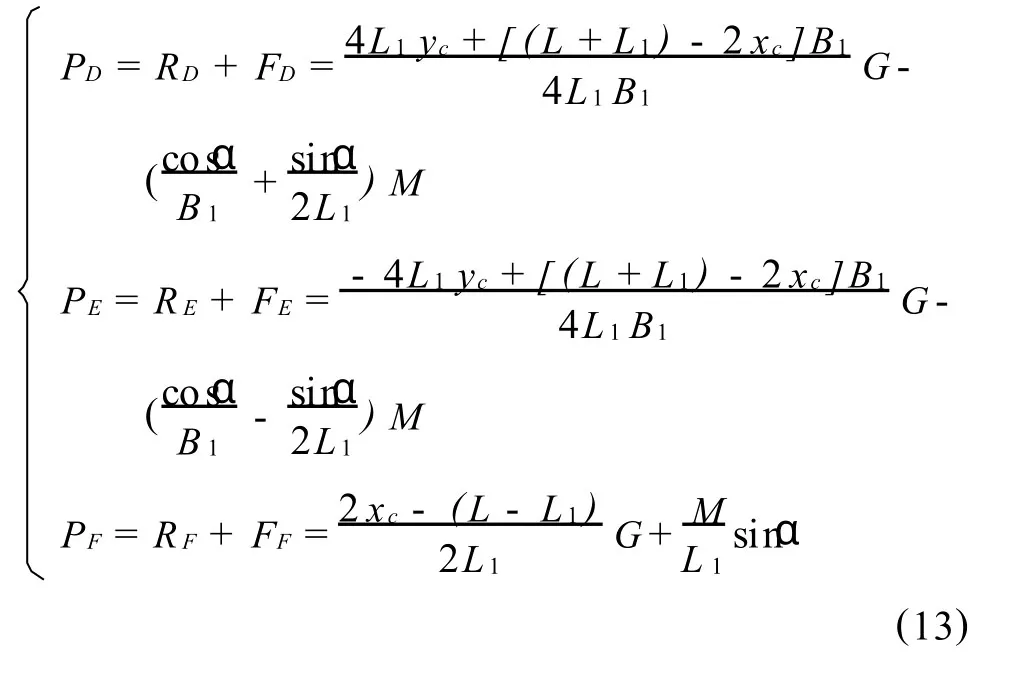
3 自重可变载荷以及风载共同作用下各桩腿受力
由于各桩腿材料均处于线弹性阶段,故各桩腿受力等于将自重及可变载荷作用下与风载作用下的受力线性相加,即
4 各桩腿受力不均导致的平台倾斜角度计算
由上述分析可知,各桩腿在自重、可变载荷及风载荷共同作用下受力分别为 PD、PE、PF,假设各桩腿在各自载荷作用下的缩短量分别为ΔlD、ΔlE、ΔlF,则
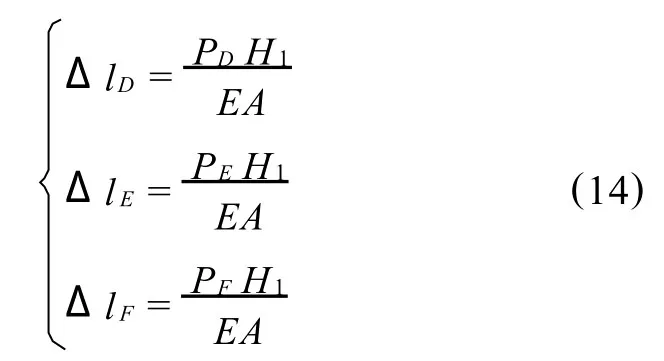
式中,H1为平台下部桩腿长度,m;E为材料弹性模量,GPa;A为桩腿横截面积,m2。
为了便于分析,重新建立如图6所示平台主体平面坐标系,因此平台上 D、E、F的初始空间坐标分别为(0,B1/2,0),(0,-B1/2,0),(L1,0,0)。考虑到各桩腿在压力作用下缩短变形,因此 D,E,F三点在桩腿变形后的新坐标分别变为(0,B1/2,-ΔlD),(0,-B1/2,-ΔlE),(L1,0,-ΔlF)。
故变形后得
故平台所在平面的法线方程为

故平台所在平面的平面方程为

化简得



图6 桩腿位置
5 结论
本文以三桩腿自升式平台为模型,分析了在自重、可变载荷和风载荷共同作用下各桩腿的受力情况。由于在多种工况下各桩腿受力即为与各桩腿上齿条相啮合的升降单元受力,因此,利用本研究的结论结合相应平台升降单元的数量及其分布即可推算单个升降单元所承受的载荷,为升降单元安全评价和寿命评估奠定了基础。本文所推导的平台倾斜角度计算方法也可以确定平台在不同工况下的倾斜程度,为适时调整作业载荷提供依据。
[1] 陈 宏,李春祥.自升式钻井平台的发展综述[J].中国海洋平台,2007,22(6):1-6.
[2] 赵洪山,刘新华,白立业.深水海洋石油钻井装备发展现状[J].石油矿场机械,2010,39(5):68-74.
[3] 侯福祥,张永红,王 辉,等.深水钻井关键装备现状与选择[J].石油矿场机械,2009,38(10):1-4.
[4] 何毅斌,陈定方.基于可靠性原理的海洋平台传动齿轮设计研究[J].石油矿场机械,2009,38(10):40-42.
[5] 张用德,袁学强.我国海洋钻井平台发展现状与趋势[J].石油矿场机械,2008,37(9):14-17.
[6] 马志良,罗德涛.近海移动式平台[M].北京:海洋出版社,1993:10-12.
[7] 孙永泰.自升式海洋平台齿轮齿条升降系统的研究[J].石油机械,2004,32(10):23-26.
[8] 中国船级社.海上移动平台入级与建造规范[S].北京:人民交通出版社,2005:2-24.
Force Analysis of Pinion and Rack Jacking System of Three Legs Jack-up Platform
FAN Dun-qiu1,CUI Xi-jun1,CAO Yu-guang2
(1.Drilling Technology Institute,Shengli Petroleum B ureau,Dongying257017,China;2.College of Transport&Storage and Civil Engineering,China University ofPetroleum,Dongying257061,China)
The pinion and rack jacking system is the most important bearing apparatus of the jackup platform.It has to support the platform itself,equipments on it and external loads.Thus the jacking system bears heavy load for long time.In this paper,the most commonly used three legs jack-up platform was selected for analyzing the load acted on the jacking system,by means of internal force of the legs.Results of the research can be used for the safety evaluation and life prediction of the jacking units.
jack-up platform;jacking unit;force analysis
1001-3482(2010)12-0027-04
TE951
A
2010-06-12
樊敦秋(1968-),男,山东日照人,高级工程师,主要从事海洋工程科研设计工作,E-mail:fandunqiu@126.com。
