远程空空导弹制导与控制技术
2010-12-03高建军
高建军
(中国空空导弹研究院,河南洛阳471009)
0 引言
在远程空空导弹方面:美国的“不死鸟”AIM-54C远距拦截空空导弹最大射程达到150 km;另外,美国一方面重新开始射程达300 km的先进远程空空导弹研制,另一方面对A IM-120中距空空导弹换装新型涵道式火箭发动机,提高射程,满足近期美军对远程空空导弹的需求。俄罗斯正为R-77加装火箭冲压发动机,使之射程达400 km;同时进行KS-172型远程空空导弹的研制工作,KS-172型导弹射程为400 km。俄罗斯也正在对Kh-31空地反辐射导弹进行改装,使该弹具有200 km以上的射程,用以攻击空中预警机。欧洲导弹制造商MBDA公司研制的,使用冲压式火箭发动机、最大射程达150 km的“流星”中距空空导弹也正在抓紧研制。
设计一种反预警机的导弹,导弹的火控系统必须绝对过硬,导弹不仅要探测到(300~400)km外的目标,还要有精确测距能力,使导弹得到精确的起始目标位置,以找出能量消耗最经济的航路飞向目标,确保导弹能达到最大射程。导弹还应具备一定的人工智能,避免作战时把密集编队的飞机误当成大型飞机,由于超远程导弹动辄几百万美元的造价,若需耗在低价值飞机上,实在是一种浪费。采用先进制导技术,进一步提高命中精度。如采用全球定位系统(GPS)修正惯导误差,或采用红外成像、毫米波雷达自动寻的作为末制导以提高精度,使导弹在复杂电磁环境下的生存能力增强。
为此需要采用复合制导技术,复合制导解决了超视距空战问题。
1 复合制导
复合制导是指导弹自主飞行弹道中不同时间段采用不同的制导方式和制导律的制导模式。导弹在攻击中远距目标时,飞行初段和中段采用惯导,并为导弹配以必需的数据传输设备解决中段目标修正,使导弹在自动驾驶仪和惯导控制下靠近目标,直至导引头完全锁定目标。飞行末段采用主动雷达或红外导引头攻击目标。如中距空空导弹 AIM-120A、R-77,远距截击型空空导弹AIM-54A“不死鸟”、AA-9“阿莫斯”等均采用此制导方式。KS-172型导弹采用无弹翼、尾部控制的气动外形布局,制导系统采用复合制导,即惯性加指令修正中制导和主动雷达末制导。AIM-120A是全数字式制导,采用惯性中制导和互波段(8 GHz~10 GHz)PD主动雷达末制导相结合的复合制导,这提高了导弹最大发射距离和载机的解脱距离,并使导弹具有多目标攻击和“发射后不管”能力。该弹有三种中制导方式:惯导、指令惯导和雷达干扰寻的;有三种末制导方式:高脉冲重复频率主动雷达制导,中脉冲重复频率主动雷达制导和雷达干扰寻的。AMRAAM能够测定目标与导弹的相对位置,其主要目的是预测目标机动和剩余飞行时间,以便利用更先进的导引规律对付大机动的目标。
1.1 组合导航系统
用作传感器的惯性器件有各种陀螺和加速度计,分别用于测量导弹的姿态角、姿态角速度和线加速度。直接用于反馈的惯性器件其精度要求较低,而兼用于捷联式惯性导航系统中的惯性器件其精度要求较高。它由分别固定在三个弹体轴上测量其线加速度的加速度计、测量角速度的速率陀螺、相应的频率代码变换电路和数字微处理器构成。惯性导航系统具有自主性强、隐蔽性好的特点,因而在空空导弹制导系统中得到了广泛的应用。美国的“不死鸟”AIM-54C远距拦截空空导弹、A IM-120中距空空导弹和通用动力公司的AAAM概念远程空空导弹,以及俄罗斯的 R-77中距空空导弹和KS-172远程空空导弹,欧洲的“流星”中距空空导弹等就采用了惯导系统作为中制导手段。
惯性导航系统的不足之处,是其导航误差随工作时间的加长,呈快速增长的态势,这主要是由于惯导系统中未能补偿掉的陀螺漂移和加速度计零位偏置造成的。因此,在远程空空导弹中,都采用一个非惯性的辅助导航系统,周期性地对自主工作的惯性导航系统的参数进行修正。远程无线电导航系统、全球定位系统(例如GPS,GLONASS等),都可用作构成组合导航系统的辅助导航系统。
当然,两个系统组合的结果,会使这个系统失去惯导系统原来具有的自主性或隐蔽性。当然,也可以采取一些弥补措施。例如,对导航雷达的发射信号进行加密,对接收到的GPS或GLONASS信号采取一些抗干扰措施等。
组合导航系统中,两个导航系统的组合方式有两种:松耦合和紧耦合。根据最佳控制理论的原理,利用卡尔曼滤波器,先对非惯导系统的输出量求取最佳估值,然后再用于对惯导系统输出的导航参数进行修正,称之为“串行耦合”或松耦合。现代的组合导航系统,则进一步采用数据融合理论,利用两个导航系统的导航参数观测差,通过最优组合的导航用卡尔曼滤波器,求取它们的最佳估值。这个滤波器既是两个导航系统的数据接口,又是数据融合的最佳估计与滤波装置,称之为紧耦合导航系统。A IM-120D导弹通过采用GPS辅助导航系统改进了制导性能,通过采用新的制导软件,改进了导弹的运动性能。
组合导航系统目前的研究重点:改进的GPS/INS、抗干扰GPS系统和微机电系统战术惯性测量装置。
1.2 数据链和导引头
数据链指令修正系统传送载机测量的目标信息给导弹,双向数据链增加了导弹在击中目标之前将目标数据发回给载机的功能。
A IM-120导弹有三种中制导方式:惯导、指令惯导和雷达干扰寻的。
美国空军委托雷神公司继续实施A IM-120C先进中距空空导弹改进计划,以便在未来10年与欧洲联合发展的“流星”中距空空导弹进行竞争。其改进的重点包括加装一种新的双向数据链,以提高导弹的命中精度。
A IM-120D导弹还加装了双向数据链,该数据链可以使导弹在击中目标之前将目标数据发回给战斗机。这是进行超视距攻击应具备的关键特性。
MBDA公司正在研制的“流星”超视距空空导弹(BVRAAM)也加装了可靠的数据链进行中段制导修正,并计划采用双向数据链。
R-77制导方式为惯导加指令修正和主动雷达末制导,计划飞行阶段用数据链控制。
导引头是导弹制导系统的目标探测跟踪环节,它根据目标的有关信息(无线电波、热辐射或其它形式能量)来探测、截获和跟踪目标,同时测量导弹与目标之间的视线角速度,给导弹制导系统提供导引信号,有时还向近炸引信、推进系统、发控系统和载机火控系统提供必要的信息。中远程空空导弹一般采用雷达导引头和红外导引头。
美国的“不死鸟”AIM-54C远距拦截空空导弹采用主动多普勒雷达导引头作为末制导。
A IM-120是全数字式制导,有三种末制导方式:高脉冲重复频率主动雷达制导、中脉冲重复频率主动雷达制导和雷达干扰寻的。AMRAAM能够测定目标与导弹的相对位置,其主要目的是预测目标机动和剩余飞行时间,以便利用更先进的导引规律对付大机动的目标。在较远距离上用高脉冲重复频率测速,以提高导引头截获距离,而在低空下视或近距时,应用中脉冲重复频率,以提高对目标的分辨率和低空下视能力。目前,美国正在按照“被动式附加导引头天线”计划,为AIM-120研制一种被动式反辐射附加导引头,使AIM-120具有双模(dual-mode)作战能力。当目标飞机的空中拦截雷达正在辐射电波时,附加导引头可以使AIM-120向目标飞机被动制导发射,这样美国战斗机不需使用自身的雷达,AIM-120的被动导引头就能自动搜索目标雷达辐射的无线电能量。如果目标飞机雷达停止工作,AIM-120导弹将自动转为主动导引头工作模式。
A IM-120B可能采用一个新的双模导引头,它的多频谱导引头将能选择多种频率以增加导弹头寻的预定目标的能力。多频谱导引头的第一阶段是概念设计(处理多个探测器和模态的算法研究,导引头对付目标威胁和电子干扰的性能评估,挂飞实验计划,性能价格权衡研究)。
由于世界各国对新一代雷达型空空导弹提出各种各样的要求,并且主要用于装备第四代战斗机,因此导致新一代雷达型空空导弹需要采用模块化结构,可以使导弹更换不同型号的导引头:雷达头、红外头等。其特点是导弹具有“发射后不管”能力,采用同一制导规律及共用导弹头部窗口进行两种模式信号检测,可以互补雷达、红外技术优势,利用红外的良好抗电磁干扰、角分辨率高的特点。目前,A IM-120D采用模块化结构。
通用动力公司等提出的AAAM概念导弹在弹道末段转变为半主动雷达制导。导弹有一双模导引头,中间为红外导引头,导引头周围包着雷达天线,在攻击的最后阶段将天线罩抛离,以便让红外导引头工作。在该项目被取消之前,曾考虑增大导弹容积以解决X-波段雷达的问题。
雷神公司等提出的AAAM概念导弹采用大孔径,大功率主动雷达导引头。然而,中段制导是半主动的,在末段采用主动成像红外和跟踪干扰的复合制导。
MBDA公司“流星”超视距空空导弹末段采用主动雷达制导,并计划采用主动雷达/红外成像双模导引头。
R-77的导引头为多功能单脉冲多普勒主动雷达头,工作在J波段(10 GHz~20 GHz),对于5m2雷达反射面积目标的截获距离为十几公里,可在极短的距离上被激活发射。此外,俄罗斯对R-77的改进还有:采用红外导引头;装用被动雷达寻的头,用来进行空对地压制或攻击其他敌机。
目前正在加紧进行毫米波、红外等末端导引头算法研制、传感器融合、光学相关技术、电子处理器等信号处理器性能改进工作。
2 控制原理和控制方式
飞行控制系统(简称飞控系统)是导弹制导控制系统的重要组成部分,一般由自动驾驶仪与弹体动力学环节构成闭合回路。在飞控系统中,自动驾驶仪通常包括传感器、控制电路、气动舵机与推力矢量执行机构等弹上设备;而弹体动力学通常包括气动力控制面、推力矢量控制面和弹体,弹体是受控对象。在弹体动力学已经确定的条件下,飞控系统的任务就要通过自动驾驶仪来完成。
飞控系统的任务分为稳定和控制两个部分。在导弹飞行条件变化或受到外部干扰时,系统要保持导弹姿态不变或限制姿态角速度值,并保证导弹质心运动的稳定性,并可快速准确地按控制指令改变导弹的姿态和实现要求的横向机动过载。
先进的中距空空导弹,其典型飞控系统一般采用多状态变量反馈的控制方式。其俯仰和偏航通道反馈的状态变量有弹体角速度、伪攻角和横向过载。横滚通道采用横滚角速度和角位置反馈。同时配有捷联式惯导系统和弹载计算机,能实现惯性参考自适应控制,以保证在各种飞行条件下使系统达到最佳稳定性和操纵性。
远程空空导弹使用的控制方式可以分为以下三种。
(1)按控制通道分类
控制导弹的目的是使导弹的质心在遇靶瞬间与目标的距离达到最小。目前,一般导弹都是通过对姿态的控制间接实现对导弹质心运动的控制。导弹姿态在空间有三个自由度,即俯仰、偏航和横滚运动,故对应的导弹控制有三个通道。根据导弹的尺寸大小、功能要求不同,空空导弹具有以下三种控制方式:单通道控制方式、三通道控制方式和五通道控制方式。
(2)STT和BTT控制方式
根据对导弹机动(升力)方位的控制方法不同,可分为STT和BTT两种控制方式。STT称为侧滑转弯控制,它是导弹的一种常用控制方式。STT控制方式是通过相互垂直且独立的上/下(俯仰)和左/右(偏航)两个通道共同作用来完成导弹所需的转弯运动。这种控制方式允许导弹侧滑,也允许有一定的滚动,系统设计相对简单。但是,这种控制方式不适用于非轴对称外形或者不允许侧滑运动的导弹。
BTT称为倾斜转弯控制,它是导弹的一种新型控制方式。该方式基本消除了导弹的侧滑运动,除用一个或两个通道同时产生控制力外,控制方位由横滚控制通道来完成。导弹的另一通道(如偏航)主要用于控制导弹协调转弯并限制或消除导弹的侧滑。BTT控制方式主要用于气动布局为非轴对称的导弹。
(3)气动力和推力矢量控制方式
根据导弹控制力的产生方式可分为气动力控制、推力矢量控制和气动力/推力矢量复合控制等三种控制方式。
1)气动力控制方式
空空导弹一般采用气动力控制方式。气动力控制方式的局限性在于它受导弹飞行状态的限制。当导弹速度小或飞行高度高,需要较大的过载进行转弯机动时,将由于导弹的可用过载小而不能满足系统要求。
2)推力矢量控制方式
推力矢量控制的特点在于其控制力为发动机推力分量,因而基本与导弹的飞行状态(速度、高度)无关。可以在空气稀薄的高空(20 km以上),也可在导弹低速下给导弹提供足够的控制力,这是气动力控制方式不可比拟的。
3)气动力/推力矢量复合控制方式
由于导弹的质量和尺寸的限制,制约了发动机的最大装药量,限制了导弹全程矢量控制的采用,因而采用气动力/推力矢量复合控制方式。
“流星”导弹采用的控制方式:倾斜转弯(BTT)和侧滑转弯(STT)。如图 1所示,“流星”导弹采用了正常气动布局,静稳定尾翼控制,双下侧二元进气道,相互间隔90°径向角,呈面对称设置。四片全动梯形尾舵,两片固定弹翼,与二元进气道一起呈轴对称设置,可通过推力矢量控制实现大离轴角发射或进行中途修正。
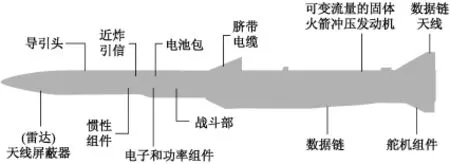
图1 “流星”导弹结构示意图
与A IM-120等轴对称弹体导弹不同,“流星”导弹的最大升力面的法向力大于其他方向的法向力。因此,其气动布局构成升力弹体。只有采用BTT机动控制模式才能避免大的侧滑角给进气道性能带来的不利影响并获取较大的横向过载能力。
A IM-120采用大细长比、小翼展、尾部控制的正常式气动外形布局,其优点是需要的舵机功率远小于弹翼控制方式,因而可以使用重量轻、体积小的机电伺服系统。
雷神公司等提出的AAAM概念导弹采用倾斜转弯而不是侧滑转弯,以节省能耗。
法国马特拉公司的“米卡”(MICA)空空导弹采用推力矢量控制与传统气动控制舵相结合的方式。俄罗斯的AA-11“弓箭手”空空导弹配备了三种伺服系统即滚动控制、推力矢量控制和鸭式气动舵控制,其推力矢量控制采用挡流片方案,导弹最大过载达50 g。
俄罗斯的R-77采用正常式气动布局,但在结构设计上有其独到之处,首次在空空导弹上采用四片格栅式尾翼舵面,取代传统的空气动力控制舵面,以减轻尾翼重量,减少大攻角机动飞行时的气流分离,减小舵面气动铰链力矩,从而减小舵机功率,增大气动升力和控制力矩,降低舵机能源,提高低速飞行时的稳定性和高速飞行时的机动性,改变舵的格栅数量就可能改变尾翼特性,这种燃气动力偏转装置可使导弹以150°/s的速度转弯,能攻击过载超过12 g的目标,提高了导弹机动能力。
3 结束语
借鉴国外发达国家研制远程空空导弹的成功经验,积极采用成熟的技术,尽快地研制出性能优良的远程空空导弹,提高我军战斗力。
[1] 刘桐林,等.世界导弹大全[M].北京:军事科学出版社,1998.
[2] 张枫.流星导弹冲压发动机进展动态[J].固体推进技术,2009,(3).
[3] Robert H ew son.Jane's Air-Launched Weapons[M].2008.
[4] 李红民.超视距空空导弹的现状及发展趋势[J].航空兵器,2001,(3).
[5] 王祖典.发展中的第四代空空导弹[J].航空兵器,1996,(2).
[6] 周军.先敌发现先敌杀伤的超视距空空导弹[J].飞航导弹,2001,(4).
[7] 王起飞,苗永强.流星空空导弹战术技术性能分析[J].航空兵器,2004,(5).
[8] 梁晓庚,等.空空导弹制导控制系统设计[M].北京:国防工业出版社,2006,(6).