稳态加速度模拟试验设备:离心机设计(7)
2010-11-28贾普照
贾普照
(北京卫星环境工程研究所,北京 100094)
第4章 欧美其他国家离心机(续2)
4.4 美国离心机
美国是航空航天大国,当然也是包括载人离心机在内的航空航天离心机大国,研究这些离心机是观察美国的侧重点,可惜缺少细节资料。
在土力学领域,虽然早在20世纪30年代,美、苏科学家几乎同时率先认识离心模拟方法,但实践中美国比较重视数值分析,只是在20世纪后期才又逐渐拾起离心模拟方法。因此,在土工离心机方面的发展美国远不如欧洲和日本蓬勃,而且也不像苏联和英国那样靠自己因陋就简起步,他们的土工离心机基本上都是委托专业单位进行研制,起点较高,但总体水平还是没有达到欧洲的高度。下面介绍几个典型的离心机。
4.4.1 美国国家土工离心机
1987年8月美国加利福尼亚大学戴维斯分校(University of California, Davis, USA)从NASA接收了一台半径9.14 m(主轴中心至平台的距离)的大型航空航天物体离心机。这台离心机最先于1984在阿姆斯研究中心(Ames Research Center)首次运转,属于1978年与戴维斯分校双方协作研制的,1987年才决定搬迁至戴维斯分校。
将航空航天物体离心机转化为土工离心机,虽然只是这台离心机的转变,但一叶知秋,它也具体折射出整个离心机世界的兴衰与变迁动向,需求决定着命运。
限于经费原因,计划分阶段逐渐将其改造为国家土工离心机:
第一步,打基础、筑墙基先将离心机安置在露天,安装一台1 000马力(相当于745.7 kW)的直流电动机转到25 g;
第二步,修围墙、盖屋顶,借助封闭空间的气团旋转,使机器转到100 g;
第三步,增添一台电动机转到170 g;
第四步,改造供电电网、再增添电动机,使离心机最后达到300 g。
可见,堂堂美国、鼎鼎名校也有着一段艰苦创业的历史[9]。
该离心机的基本技术参数为:负载平台的长×宽为1.82 m×2.13 m,面积达3.88 m2,模型高度可达1.52 m,结构允许安装3 640 kg的有效载荷转至300 g。
图4-47表示1987年离心机被安置在露天钢筋混凝土基础上,以低速度徐徐转动起来的情况,图中可见吊篮已经被甩起的过程,表示第一阶段目标实现,可以在这种环境下因陋就简地开展实验工作了。
1989年建起了围护墙(见图4-48),机器最高转到53 g,准备通过对驱动电机和某些气动方面的改进措施,争取达到100 g[10]。在改造之前,他们已经在低加速度条件下积极开展了各种大尺寸模型——小模型率的实验工作,以便将原型缩小为比高g值模拟时采用的模型大一些的缩模,而以低g值来模拟之。

图4-47 Davis离心机第一阶段在露天地坑中转起来Fig. 4-47 The Davis centrifuge first stage operating in the outdoor pit

图4-48 Davis离心机第二阶段有了实验室Fig. 4-48 The Davis centrifuge second stage had a laboratory
1994年报告了加装大型振动台的信息,即利用离心机低加速度运行状态,改变原计划,增添振动台直接进入复合环境模拟阶段[11](见图4-49和图 4-50)。这倒是一个非常聪明的改变[12,13],因为在加速度一时难以上去的阶段,加上一台迟早要添加的振动台,比提高加速度容易多了,而且离心机马上就变得十分有用。可见,目前它还只是加速度100 g以下的一台大尺寸复合环境离心机。

图4-49 Davis离心机复合振动台状态之一Fig. 4-49 Davis centrifuge complex state of the shaking tableⅠ

图4-50 Davis离心机复合振动台状态之二Fig. 4-50 Davis centrifuge complex state of the shaking table II
Davis离心机基本技术参数为:
• 主轴中心线至吊篮底板9.1 m;
• 最大有效载荷 4 500 kg;
• 吊篮有效面积 4.0 m2;
• 最高运转速度90 r/min(相当于75 g)。
驱动系统
• SCR 直流供电系统;
• GE 752 1000 HP DC 电动机;
• Falk 齿轮箱。
旋转接头
• 两对压缩空气;
• 两对油压;
• 一对水;
• 一对1 000 psi(相当于6.895 MPa)压缩氮气;
• 备用两对。
汇电环
• 信号环40;
• 视频环40(20路);
• 电源环20(10路);
• 2路光纤视觉梯度。
监控离心机和振动台的数采C-DAQ (centrifuge data acquisition system)及子网络系统
PC - NGC-Main:
• PCI-6071e —振动台控制器采集数据发送命令的多功能卡;
• PCI-6527 —控制开关与监测信号数字界面。
PC – NGC-Rotunda:
• PCI-6071e —离心机速度控制器采集数据发送命令的多功能卡。
2042-RTD —RTD温度传感器信号调节:
• DIO-24 —控制开关与监测信号数字界面。
ER-16 —继电器开关。
离心机、振动台控制分系统传感器及信号调节监测
• 温度;
• 振动;
• 应变/位移;
• 振动台界面;
• 驱动电机控制;
• 阀。
警告与限制
避免停留于引发驱动系统扭转响应频率的下述转速:
32.2 r/min(31.2~33.3 r/min)(约 9~11 g);
64.3 r/min(62.3~66.3 r/min)(约 37~42 g);
72.0 r/min(69.8~74.2 r/min)(约 47~53 g)。
附加的振动台性能如表4-7所示。

表4-7 大型振动台性能规格Table 4 -7 Large-scale shaking table performance specifications
图4-51表示Davis离心机及其实验室相关尺寸和构造的关系,图中标识为M的是一台750 kW的型号为GE 752直流电动机,通过减速比为2.76:1的减速器G传递动力到减速比为3.62:1的转台T;再利用转台垂直轴Sp上的花键轴,通过剪切销联轴节驱动离心机转子,此安全联轴节提供了离心机的过载保护。直流电动机由50 m开外的可控硅整流器(SCR)通过地沟U供电,齿轮箱冷却水管也从这里穿过来。

图4-51 Davis离心机及其实验室尺寸和构造示意图Fig. 4-51 Davis centrifuge and its laboratory size and structure diagram
离心机主机室天花板中央留有4.3 m见方的开口,安装1 000路汇电环组件,其顶部覆盖木制雨棚;雨棚延伸至整个屋顶,在屋顶适当位置留有窗口W安装闪频照相机用于观察模型;而雨棚壁总计有19 m2的百叶窗L,外墙周顶均布12个0.3m ×2.4 m通风口V,作为主机室冷却空气的风口。
为了测量室内的风速,沿水平撑角 R不同位置安置了皮托管(空速管)。
图4-52是Davis离心机转子的结构分解图,直接连接着吊篮和配重的主承力件为4根15.2 m长、横截面为0.076 m×0.76 m的高强度钢带,用销子把吊篮和钢带同一个中央焊接件连接起来;为防止横向加速度造成钢带侧弯,焊接件每边都用11根拉杆将其拉住,钢带与拉杆之间垫以钢垫圈,提供平滑的滑动表面。图4-53为吊篮的结构图。

图4-52 转子结构分解图Fig. 4-52 Rotor structure exploded view

图4-53 吊篮结构图Fig. 4-53 Basket structure drawing
转臂、主轴、轴承等驱动和支撑零件处都布置了各种测量装置,诸如应变片、温度计、振动传感器等等,以便在运转中对转臂、吊篮、主轴、转台进行实时应力、应变、温度、振动监测。离心机监测和速度控制,集中于计算机数采和控制系统中,32个传感器分为机上和机外两部分,所有信号都调制到40 m外的控制室的数采系统:16个机上通道可以监测承力钢带的拉伸与弯曲,中央焊接件的弯曲与不平衡拉伸,吊篮侧板拉伸与弯曲,承力钢带相对于中央焊接件的偏离值等等;16个机外通道监测主轴轴承和驱动电机温度,主轴弯曲与剪切载荷,主轴振动,转台振动,电动机电流、电压和速度。检测控制系统方块图如图4-54所示。

图4-54 检测控制系统方块图Fig. 4-54 Detection-control system block diagram
根据离心机的大惯量以及速度与气动阻力的关系,研发了专用闭环速度控制装置,可假设离心机运动方程为

其中:ω为角速度;I为模型、吊篮、配重及转臂的转动惯量之和,对于Davis离心机,I的估算值为 2.4×106kg·m2;R=R(ω)为表征驱动离心机所需的稳态力矩系数,在低速状态下由于机械摩擦为主R接近常数,在高速段时支配因素为气动阻力,R正比于角速度的平方(或正比于离心机加速度);T为驱动力矩,对直流串绕电动机而言,设定它等于系数k与电流i平方的乘积。
运动方程表现为一阶非线性方程,可分段线性化予以简化,将其线性化为角速度和电动机电流的函数,闭环系统表示在图4-55中。图中ωe为预期速度,ω为实际速度。闭环控制器为PI(比例加积分)型,当系统稳定时,将使稳态误差(ωe– ω)接近于零。由于电动机电流和离心机的非线性,闭环控制器参数根据实时速度和电流分段予以修正。为此,利用软件通过计算机中断服务不断调节控制器参数来优化系统性能。

图4-55 闭环控制系统Fig. 4-55 Closed-loop control system
Davis离心机是目前世界上可承载模型尺寸最大的离心机,但加速度偏低,转子潜能尚未发挥出来,加速度值与载荷容量暂时都不突出,适用于大尺寸模型—小模型率的动态试验。
总体上为对称转臂,不对称吊篮构造,这是又一种转子形态;其最突出的结构特点是转臂承力件为钢带,使得工艺性变得非常好,因为转臂侧向刚性较弱,吊篮自身相对就需要强壮一些;另外机器没有整流,适当整流也是提高加速度的一个途径。离心机总的特点为:
• 对称转臂,不对称吊篮;
• 固定式配重;
• 配重端与转臂同高;
• 主承力件为钢带;
• 下支撑;• 下传动;• 非整流转子;• 配备振动台。
4.4.2 科罗拉多大学土工离心机
1985年科罗拉多大学民用环境及建筑工程系委托 Wyle Laboratories设计,Alabama Dynamics制造400 gt土工离心机,1988年全面运转[14,15],后来又加装了振动台。
图4-56为离心机结构透视图,形象地表达了包括实验室在内的基本情况。转臂与Davis离心机相仿,由两部分组成:一个基础的盒形结构和两对高强度钢带。前者构成结构的基础,维持整体性;后者承受主拉力。

图4-56 Colorado离心机结构图Fig. 4-56 Colorado centrifuge structure drawing
试验吊篮的结构两者有一些区别:Davis吊篮为整侧板;而Colorado吊篮侧板则为板条结构。
离心机驱动装置和控制室全部置于地下,主机室没有电动机,也就避免了Davis实验室那样,对暴露电动机进行整流的麻烦;同时,驱动与控制装置都在地下,变长距离控制与传输为就近进行,都是一个改善,但代价就是增加了建筑物难度,控制室工作环境也不太好。
转臂内部附加了一套运转中自动平衡装置,它是一套由载荷传感器控制的氮气压力驱动的水箱系统。
离心机总体设计上颇具特色:转子刻意不整流,期望尽可能推动室内气团旋转速度,减小相对风速以降低风阻功率,而室内热量则靠墙壁附加的盘绕式冷却水屏带走。
离心机驱动系统为功率900马力(671 kW)的直流电动机经 6.4:1直角伞齿轮减速器带动主轴,于14 min内加速到200 g,中间加了一组4个气动盘式制动器,用于电气系统发电反馈制动后进行完全制动或紧急制动时使用。
离心机转动中心至吊篮平台的半径为 18 ft(5.49 m),有效载荷最大尺寸为 4 ft×4 ft×3 ft(1.22 m×1.22 m×0.91 m),最大质量为4 000 lb (1 814 kg),最高加速度200 g,则最大载荷容量为363 gt。
离心机配有100个电滑环,3路油接头,后者可用一路大容量水接头替换。
离心机模型箱和实验室配有各种各样加载及观察、测量装置。
图4-57为科罗拉多土工离心机的总体外观图。

图4-57 Colorado离心机外观图Fig. 4-57 Colorado centrifuge outward appearance chart
科罗拉多大学除了上述大型离心机外,早在1981年就拥有一台Genisco 1230-5型15 gt小型土工离心机,同样加装了振动台,许多实际使用经验多来自这台机器。
科罗拉多大学离心机与Davis离心机除了吊篮有些区别以外其余基本相同,其结构特点为:
• 基本对称的转臂;
• 主承力件为钢带;
• 不对称吊篮;
• 板条式吊篮侧板;
• 配重端与转臂同高;
• 固定式配重;
• 运转平衡系统;
• 刻意不整流转子;
• 实验室墙壁配以水冷系统;
• 下传动。
4.4.3 SANDIA国家实验室航空航天离心机
美国Sandia National Laboratory位于新墨西哥州的Albuquerque,该实验室除了火箭车—滑轨之外还有两台特殊的离心机,那就是罕见的武器试验用物体离心机,一台位于室内,一台在露天。图4-58为室内离心机的照片,离心机的规格如下[16]。
半径:29 ft(8.84 m);
载荷容量:1.6×106g·lb(725.6 gt);
最大有效载荷:16 000 lb(7 257.6 kg);
加速度:到100 g(轻载荷时最大300 g);
最高转速:175 r/min。

图4-58 Sandia国家实验室的室内离心机Fig. 4-58 Sandia National Laboratory indoor centrifuge
典型的试件为:
卫星部件;
再入飞行器;
土工模型;
火箭部件;
传感器;
武器部件。
离心机放置在直径 80 ft(24.38 m)、高 12 ft(3.66 m)的洁净可调温的地下室内。离心机已经在100 g状态下复合了15 grms由50 Hz到2 000 Hz的振动台,有效载荷为400 lb(181.4 kg);进一步的发展是研制对50 lb(45.4 kg)有效载荷进行可控加速度、振动和双轴自旋的联合试验。
图4-59为室外离心机的照片,离心机的规格如下。
半径:35 ft(10.67 m);
载荷容量:450 000 g·lb(204.08 gt);
最大有效载荷:10 000 lb(4 535 kg);
加速度:到45 g;载荷1 700 lb(771 kg)时,加速度达270 g;最高转速:150 r/min。

图4-59 Sandia国家实验室室外离心机Fig. 4-59 Sandia National Laboratory outdoor centrifuge
典型的试件为:
爆炸荷载;
特大型物件;
冲击试验释放物件;
火箭发动机点火试验。
如此高的加速度,看来进行土工模型试验也是可以的。
从标识上看出是 Rucker公司产品,与图 2-3康维尔离心机相似,具有典型的美国航空航天物体离心机的特征:
• 全整流等长臂不对称吊篮;
• 下支撑下传动。
4.4.4 NASA加速度模拟试验设备
美国国家航空航天局 NASA是世界上最大的航空航天机构,承担国防部所有民用火箭及太空计划,进行航空技术、空间科学、生命科学的研究工作,从20世纪50年代末开始,逐渐建立起各种模拟试验设备,例如位于艾姆斯的生命科学分部重力生物研究中心的 CGBR[17](Center for Gravitational Biology Research)就有一批所谓国家重力生物实验设备,主要由一系列的离心机组成:小到直径1 ft(0.304 8 m)细胞用离心机,大到人可生活的超大型离心机,还有直线橇及多轴离心机等设备。
NASA的设备主要用于小加速度值、长期运行的人造重力生理与心理试验项目,有别于其他载人离心机,它们种类较多,形态奇特,以下列举几种以窥一斑。
图4-60为20 g离心机,可用于人、细胞、啮齿动物、植物和硬件设备,座舱(图4-61)具有适合人类生活的环境,其基本技术参数如下。
半径:29 ft(8.84 m);
有效载荷:1 200 lb(544.3 kg);
加速度:人用到12.5 g,最大达到20 g;
最高转速:50 r/min;除持续稳态加速度外还可进行快速加速度模拟,其变化率不详。

图4-60 NASA 20 g离心机Fig. 4-60 NASA 20 g centrifuge

图4-61 NASA 20 g离心机座舱Fig. 4-61 NASA 20 g centrifuge cabin
图4-62是一台人力离心机,称为 Human Powered Centrifuge (HPC),转臂上可头朝里仰卧1~2人,靠人力踏动,用来进行生理、心理和功能测试,转臂半径6.25 ft(1.9 m),脚部最高加速度可达5 g,该离心机也可由外人踏动,用于试验正向加速度。

图4-62 NASA人力离心机Fig. 4-62 NASA manpower centrifuge
图4-63为30ft直线滑橇,用来进行前庭和眼球反应研究。载人滑架置于光滑的花岗岩台面上,二者利用低压空气作为支撑即空气垫支撑;驱动采用一系列弹性缆绳,运动完全静寂无声;滑架上安装着座椅,座椅用伺服电机改变其偏航角;滑台的释放与捕获均靠计算机控制,可进行正弦或梯形运动。其基本技术参数如下。
滑台位移:23 ft(7.01m)。
梯形运动
加速度:至1 g;
稳态速度:51 in/s(1.3 m/s)。
正弦运动
加速度:0.008~0.5 g;
频率:0.2~0.6 Hz。

图4-63 NASA 30英尺直线滑橇Fig. 4-63 NASA 30 foot straight line sled
图4-64为NASA的52 ft直径离心机,供人、啮齿动物、小灵长类动物、植物进行持续加速度试验。离心机提供两套房间:一套配置专供动物使用;另一套人用。每一套均有17.7 m2面积,其中又分为4个小间,放置折叠床、收放桌、电脑、电视、储物柜等。房间一端设有卫生间,中央为公共面积,置方桌供吃饭、娱乐、交流使用。其基本技术参数如下。
半径:15~20 ft(4.57~6.1m);
有效载荷:5 000 lb(2 268 kg);
最大加速度:2 g;
最大转速:21 r/min;
座舱:190 ft2(17.7 m2)。

图4-64 NASA 52 ft英尺直径离心机Fig. 4-64 NASA 52 foot diameter centrifuge
图4-65为NASA的直径24 ft离心机,该离心机有10根转臂,每一转臂悬挂两个吊篮,吊篮尺寸为 2.2 ft×3.2 ft×1.8 ft(0.67 m×0.98 m×0.55 m),每一吊篮有16个安装位置,这样,同一台离心机的每一次运转过程,就可以有不同的加速度水平,而吊篮都要进行平衡且安装在叉头形状的常平架上,转动过程中自由摆动,得以按合成加速度方向定位,主要用于小动物、植物和硬件试验。基本技术性能如下:
半径:12 ft(3.66 m);
最大有效载荷:100 lb(45.4 kg)/每一吊篮;
最大加速度:3 g;

图4-65 NASA 24英尺直径离心机Fig. 4-65 NASA 24 foot diameter centrifuge
最大转速:30.5 r/min。图4-66为NASA多轴离心机,用于检验身体按一定频率转动,导致眼睛运动对前庭反射的表现,来试验小动物对角度或直线加速度与角加速度组合的生理反应。多轴离心机主体两端固定着对称的两个叉头部件,叉头各配置一个试验容器STC (Specimen Test Container),内部配备有试验所需的不同装置。
离心机共有4根运动轴:主自旋轴;外部高性能自旋轴;内部高性能自旋轴;内部定位轴。
离心机主体围绕主自旋轴旋转,带着STC的内常平架与外常平架联接体,并绕外高性能轴旋转。STC绕内高性能轴转动; STC还可绕定位轴转动并在运转中锁定方位。离心机可以同时组合两个运动:主自旋运动与其他一根自旋轴的运动;也可没有主自旋运动,仅仅是绕内、外高性能自旋轴运动。
多轴离心机基本技术性能如下:
主自旋轴速度:240° /s;
主自旋轴加速度:15° /s2;
高性能轴速度:±500° /s;
高性能轴加速度:±500° /s2;
定位轴速度:55° /s;
定位轴位置界限:±180º。
半径
STC中心:2.62 ft(0.8 m);
STC地面:3.44 ft(1.05 m)。
最大载荷:54 lb(24.5 kg)。
最大加速度
STC中心:1.75 g;
STC地面:2.13 g。
STC体积:2.8 ft3(0.08 m3)。

图4-66 NASA 多轴离心机Fig. 4-66 NASA multiple spindle centrifuge
NASA重力生物研究中心的各种各样加速度试验设备,让我们接触到一些另类离心机和其他一些试验装置,足以使我们扩展了视野。
4.4.5 HEPG空军研究实验室离心机
据称自1935年就开始应用离心机进行科学研究长达 70余年的美国空军研究实验室 HEPG(Human Effectiveness Protectorate-G),位于美国俄亥俄州代顿的赖特帕特森空军基地(Wright-Patterson Air Force Base in Dayton, Ohio)。
1967年(有资料称为1969年,取其早者)他们就开始运转了一台三轴载人离心机,被称之为动态环境模拟器(Dynamic Environment Simulator,简称DES),终于在2007年2月运行40年以后退役。尽管该离心机已经退役,但是它完成如此之长的历史使命值得尊敬,而且其构造也还是非常值得回顾的.其结构和外形分别如图4-67和图4-68所示[18,19]。
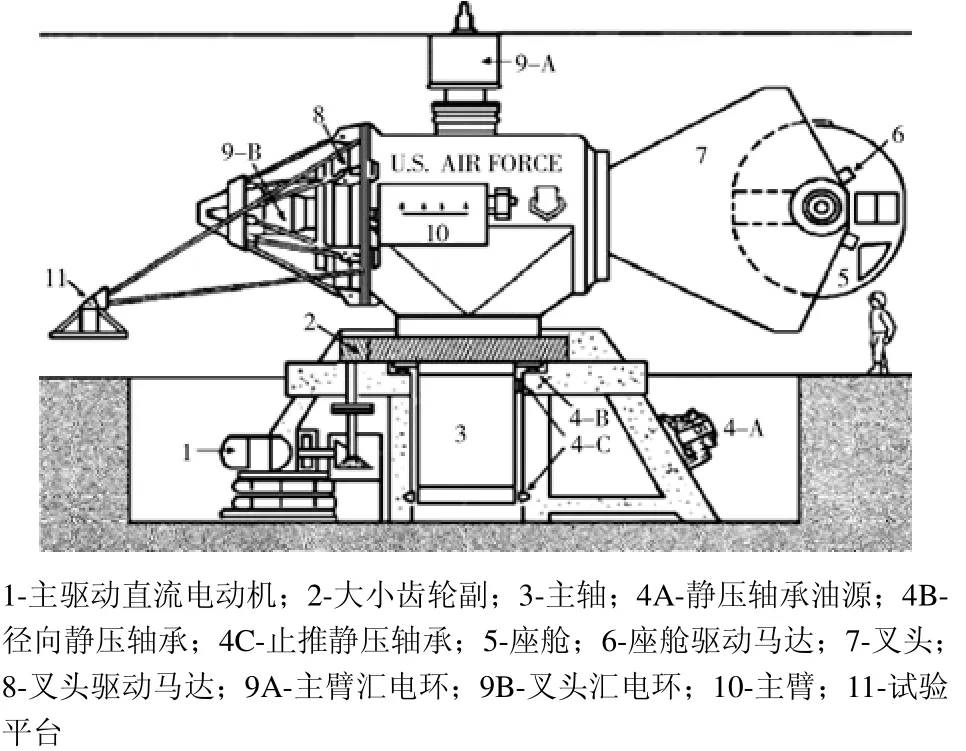
图4-67 HEPG 动态环境模拟器结构示意图Fig. 4-67 HEPG dynamic environment simulator structure schematic drawing

图4-68 HEPG 动态环境模拟器外形图Fig. 4-68 HEPG dynamic environment simulator outline drawing
在每一套汇电环尾部还附加一套液压旋转接头;座舱轴也有一套汇电环部件,很可能没有液压接头。
DES主要技术指标,不同资料出入颇大,取其高者列于如下。
半径:6 m;
最高加速度:20 g;
加速度增长率:<1 g/s;
有效载荷:1 364 kg。
除有效载荷大以外,其他指标与现代载人离心机不能相比,但其使用之久,说明仍有其存在价值,就看如何利用了。
该离心机被称之为主臂的部分短而粗,几乎与转台尺寸相当,不像是一条臂;倒是叉头部件更像是转臂,它伸出去构成了旋转半径的主要几何尺寸。如果根据“构成离心机主要结构参数——设计半径的重要构件”的定义来衡量,说它是转臂也无不可,不过这个转臂特别之处是可以绕自己的中心轴转动,一般叉头在离心机里都是固定不动的部件,因此,无论叉头还是转臂能够自转皆为其一大特点。
从图 4-69可见,叉头转动构成了受试者眼水平的俯仰运动,座舱构成滚转运动,座椅构成偏航运动。
该离心机的转子靠全静压轴承系统支撑,我们1986年开始研制的特大型人—物两用离心机也是全静压轴承系统,是因循自己大型物体离心机的静压导轨发展而来,可见,20世纪60~70年代静压技术比较时髦,至少大型轴承当时还不成熟,包括我们的座舱常平架内外环间,不得不采用自制钢丝轨道轴承也是一例。这台离心机叉头所用轴承应该也是大型轴承,何种支撑形式具体情况不详;此外,叉头驱动是大电机还是电动机-齿轮副传动也不详。
总之,叉头自转独出心裁,值得关注。

图4-69 HEPG DES参考坐标系及其定向图Fig. 4-69 HEPG DES reference coordinate system and orientation chart
该离心机结构庞大,转臂半径6 m而座舱直径就达3 m,整个转子呈短粗状,形状怪异,加上中央主臂和转台,总质量高达163 t。
离心机的配平关系不清楚,难道就因为转速不高全靠粗壮的主轴和全静压轴承承担吗?总之,这也是一台另类的低加速度离心机。
4.4.6 美国商品离心机
由于美国研究单位很少去自行研制离心机,基本都是委托研制或采购商品离心机,因此离心机制造商出现得早,数量也多,以下介绍两家。
4.4.6.1 Wyle Laboratories 离心机
维勒实验室(Wyle Laboratories)是美国著名实验设备制造商[20],擅长于航空航天生命科学研究训练设备的研制,长期执行美国国防部、NASA、美国海军等军事部门的各种研发计划,也参与其他民用商业活动,早在1960年因支持水星空间计划的加速度研究和训练任务,成为航空医学技术的先驱,首台离心机具有稳态加速度 20 g并配备振动和声环境;上世纪90年代中期,购入爱姆荣工程公司(Emro Engineering Company)陆基训练模拟器和动态运动模拟器生产线的同时也获得了一批从事35年运动模拟和空间模拟设备的工程师,从而进一步扩大了业务范围。
维勒实验室可以完成包括设备实验室及其附属设施在内的交钥匙工程,主要产品是离心机、运动模拟器、空间定向训练器、转台及低压舱等。而航空航天人用离心机以及依托离心机为基础的动态飞行模拟器,包括单轴、双轴以至三轴常平架系统。
Wyle离心机涵括4种类型:物体离心机,综合环境离心机,土工离心机,人用离心机。
(1)Wyle物体离心机
Wyle物体离心机可以根据用户对不同半径、不同载荷以及各种加速度组合的要求,照单个体研发,可参照标准的组合系列,如表4-8所示。

表4-8 Wyle物体离心机标准组合Table 4 -8 Wyle object centrifuge standard combination
从系列表观察到,他们的物体离心机有效载荷并不太大,加速度从低到高都有。
转臂可采用钢制也可用铝,吊篮可对称也可不对称;驱动系统采用液压或直流电机,控制部分可手动也可自动。总之,随君属意,点到即有。
(2)Wyle综合环境离心机
Wyle综合环境离心机用于敏感的电子或机械零部件进行品质检验,可综合各种自然和诱导环境,如振动、加速度、温度、气候和高度,基本结构是在离心机转臂一端利用绝热耳轴固定振动、气候/高度舱,而耳轴可将振动台定向到与离心机主轴平行或者垂直的不同方向。Wyle典型综合环境试验设备 CETS (Combined Environment Test System)具有如下性能。
离心机子系统
最大有效载荷:55 lb(25 kg);
最大加速度:50 g (试件质心处测量);
试件最大加速度梯度:±10%;
加速度变化率:
0~10 g 不大于2 min;
10~50 g 不大于5 min;
50~100 g 不大于10 min。
控制台: 读转数与时间;转数读出: 数字误差±1%;
驱动:直接液压马达;
转速控制:液压伺服±2%;
安全互锁:超速及液压系统过热。
振动台子系统
50 g条件下横向或轴向气冷振动台;
最大有效载荷:55 lb(25 kg);
加速度:有效载荷55 lb(25 kg)时正弦峰值为20 g;
频率范围:10~2 000 Hz;
最大振幅:峰-峰值1.0 in(2.5 cm);
正弦或随机波;
安全互锁:过调和过热。
气候子系统
不锈钢绝热气候室提供高度和温度环境,离心机不动时利用地面调节系统维持实验条件,冷量与热量通过流经电加热器和液氮冷却螺管的热循环液体进行热交换。
离心机运转时,地面系统断续工作,机上真空泵抽空并维持所需高度环境。
温度
范围:-65~300 ºF (-36~167 ºC);
热载荷:来自试件,连续500 W;
加热速度:连同内部500 W载荷,由60~300 ºF(33~167 ºC),不大于 30 min;
冷却速度:连同内部500 W载荷,由95~-65 ºF(+53~-36 ºC),不大于 45 min;
安全互锁:过温和欠温。
高度
范围:0~70 000 ft(0~21 336 m);
变化率: 静止或转动, 0~70 000 ft(0~21 336 m),15 min之内;
测量设备:高度/时间控制器及记录仪;
安全互锁:当过海拔状态时。
结构
室内空间:40 in3(655 cm3);
不锈钢内表面;
测量电缆端口。
综合实验性能
加速度、振动及气候:15 min;
振动和气候:48 h;
加速度和振动:15 min;
加速度和气候:15 min。
综合环境航空航天物体离心机在我国还是空白,主要可能还是试验方法和试验标准方面的原因,为什么美国要进行这样的试验值得研究。
(3)Wyle土工离心机
Wyle土工离心机,如Colorado土工离心机,此处不加赘述。
(4)Wyle人用离心机
· Wyle载人离心机
如图4-70所示,其技术性能如下。
半径:6.1 m;
舱体积:7.2 m3;
有效载荷:680 kg;
加速度:1~30 g;
加速度变化率:0.1~6 g/s;
峰值功率:1.5 MW;
控制形式:程序控制或人控;
闭环控制:包括F-16飞行模态;
42 in等离子显示屏。
美国空军HEPG Brooks基地配备此离心机。

图4-70 Wyle载人离心机Fig. 4-70 Wyle manned centrifuge
· Wyle动态飞行模拟器DFS(Dynamic Flight Simulator)
Wyle动态飞行模拟器被加拿大和美国空军使用,瑞典航空航天医学训练中心也配备了它,其外形和视窗效果分别如图4-71和图4-72所示。

图4-71 Wyle动态飞行模拟器Fig. 4-71 Wyle dynamic flight simulator

图4-72 Wyle动态飞行模拟器视窗系统效果Fig. 4-72 Wyle dynamic flight simulator Windows system effect
Wyle动态飞行模拟器的主要技术性能如下。
半径:30 ft(9.14 m);
最大设计加速度:15 g;
有效载荷:1 150 lb(521.6 kg);
启制动变化率:0~15 g/s;
双常平架座舱:滚转与俯仰;
座椅感知反馈;
抬头低头及窗外视觉系统;
生物医学检测系统;
提供地基模拟器功能;
离心机可以开环控制,用于G试验与G锻炼;或闭环控制,用于G容差生理学、空间定向、人/机界面研究、战术机动训练和教学。
总之,该离心机具有如下一些特点:
• 离心机转子由大扭矩直流电动机直接驱动,其质量也由电机直接传给地基;
• 球形座舱具有全旋能力,可按飞机座舱进行配置;
• 控制系统可模拟飞机动态响应特性;
• 再现所试飞机的控制算法,气动力学和发动机特性;
• 知觉算法与 DFS控制系统相结合,造成一般离心机所没有的逼真感;
• 窗外、抬头、低头显示与 DFS运动及驾驶员控制输入相结合;
• 闭环模态下飞行员全指令实飞;
• 运行过程医学检测资料实时传输;
• 用于高加速度训练的预编程模态;
• 用户可修正的模态。
瑞典航空航天医学训练中心的图片见图 4-73和图 4-74[21],它是 2001年配备的。图 4-75是该DFS安装前的转子图片[22]。

图4-73 瑞典的DFSFig. 4-73 Sweden's DFS

图4-74 DFS舱内Fig. 4-74 In DFS cabin

图4-75 安装前的瑞典空军DFS转臂与座舱Fig. 4-75 Swedish Air Force DFS Arm and Gondola Before Installation
4.4.6.2 ETC载人离心机
美国环境构建公司(Environmental Tectonics Corporation,ETC)由其总裁和首席执行官William F. Mitchell先生于1969年创立,他原是宾夕法尼亚州费城(Philadelphia, Pennsylvania)郊区一名乡村高尔夫俱乐部的年轻人。公司处女作是 1971年为美国海军研制快速减压舱,在这基础上发展了一系列低压舱类设备,如生物医学、杀菌消毒、试验模拟等系统;后来迎合社会需求逐渐发展到空勤人员训练设备,如今俨然成为当家技术;1999年后,运动模拟技术工程尤为突出。
国家宇航训练研究中心(The National AeroSpace Training and Research Center)是ETC全资子公司,装备了ETC的最新设备,供军、民、个人航空航天模拟试验和训练之用,主要设备有[23]:
(1)G-Lab单轴4000型载人离心机(图4-76)
该离心机的技术性能为:
旋转半径6.1 m;
最大有效载荷318 kg;
最大径向加速度15 g;
由怠速1.4 g开始最大启动率8 g/s;
舱内配有窗外视景显示器;
配备中央及侧面操纵杆;
座椅靠背角度可调 13°或 30°,适应大多数战斗机几何角度;
航空座椅可旋转 90°,使受试者暴露于横向加速度环境下。该离心机应用于美国空军战术部队。

图4-76 G-Lab 4000型单轴载人离心机Fig. 4-76 G-Lab 4000-single axle manned centrifuges
(2)G-FET II 双轴载人离心机(图4-77)
该离心机的技术性能为:
转臂7.6 m/系统自然频率10 Hz;
最大有效载荷350 kg;
最大径向加速度15 g,用于训练;
最大径向加速度25 g,用于研究;
由怠速1.4 g开始最大启动率为10 g/s;
gx最大值为±10 gx;
gy最大值为 0~8 gy;
主驱动为大力矩直流电动机联接精密直角减速器;
俯仰+180º~-90º,滚转+10º~+100º,由同步电动机带齿轮箱驱动;
舱内配有窗外120º×50º视景显示器;
座椅靠背角度可调 13°或 30°,适应大多数战斗机几何角度。

图4-77 G-FET II 双轴载人离心机Fig. 4-77 G-FET II two axle manned centrifuge
G-FET系列双轴载人离心机俯仰与滚转运动如图 4-78所示,这类离心机加速度变化率最大可以做到15 g/s,适应目前甚至未来战斗机性能,执行如图 4-79空战机动飞行剖面,成为其最现代的载人离心机或动态飞行模拟器之基础。
离心机转臂采用复合材料或硬铝合金制造,最小安全系数按极限强度为5.85,系统自然频率达到10 Hz。

图4-78 G-FET系列双轴载人离心机Fig. 4-78 G-FET series two axle manned centrifuge

图4-79 典型空战机动曲线Fig. 4-79 Typical air-combat maneuver curve
(3)ATFS-400战术飞行系统(图 4-80和图4-81)
该离心机的技术性能为:
旋转半径7.6 m;
(最大有效载荷350 kg);
最大径向加速度15 g;
最大启动率10 g/s;
gx最大值为±10 gx;
gy最大值为 0~8 gy;
主驱动峰值为6 000 HP(4 474.2 kW)的感应电动机;
三套精密可控电动-机械运动驱动系统;
与飞机机动飞行相协调的精密加速度矢量定向控制;
俯仰±360º,滚转±360º;
舱内配有窗外120º×70º视景显示器;
力反馈控制。

图4-80 ATFS-400战术飞行系统视图1Fig. 4-80 ATFS-400 tactic flight system view 1

图4-81 ATFS-400战术飞行系统视图2Fig. 4-81 ATFS-400 tactic flight system view 2
(References)
[9]Cheney J A, Kutter B L. Update on the US national geotechnical centrifuge[J]. Centrifuge,1988-04
[10]Kutter B L, Li X-S, Sluis W, et al. Performance and instrumentation of the large centrifuge at Davis[J].Centrifuge, 1991
[11]Using nees to investigate soil-foundation-structure interaction[C]//13thWorld Conference on Earthquake Engineering, Paper No. 2344
[12]Kutter B L, Idriss I M, Khonke T, et al. Design of a large earthquake simulator at UC Davis[J]. Centrifuge, 1994
[13]Centrifuge features and limitations[R]. Centrifuge SSDB document, 2004
[14]Ko H-Y. The Colorado centrifuge facility[J]. Centrifuge,1988
[15]Centrifuge Facilities, University of Colorado Department of Civil Environmental and Architectural Engineering[EB/OL].http://civil.colorado.edu/web/grad/geotech/faci/centrifug e/index.html, 2008
[16]Centrifuge/Superfuge[EB/OL]. http://www.sandia.gov/vqsec/SON- CF.html
[17]NASA CGBR[EB/OL]. http://cgbr.arc.nasa.gov/
[18]Butcher R K.composite data from centrifugal experimentation regarding human information processing[EB/OL].http://www.ohiolink.edu/etd/send-pdf.cgi/Butcher%20R onald%20K.pdf?acc_num=wright1182285671, 2007
[19]Van Poppel J A, Pancratz D J, Rangel M H, et al. Model validation and design for the dynamic environment simulator[J/OL]. http://www.stormingmedia.us/53/5321/A532163.html
[20]Wyle Laboratories[EB/OL]. http://www.wylelabs.com/aboutwyle.html/, 2008
[21]Kiefer D. Swedish dynamic flight simulator update[J/OL].Acceleration Research News, 2001, 2(1), http://www.flightmed.com.au/IAW2001Newsletter.PDF
[22]http://www.flightmed.com.au/workshop.html[EB/OL]
[23]The National AeroSpace Training and Research Center[EB/OL]. http://www.nastarcenter.com/, 2008
