电动汽车用开关磁阻电动机直接转矩控制
2010-11-20翟红英熊立新徐丙垠
翟红英,熊立新,徐丙垠
(1.山东理工大学,山东淄博255049;2.浙江大学,浙江杭州310027)
0 引 言
电动汽车的核心是电动机[1],目前电动汽车用电动机主要有四种:直流电动机、感应交流电动机、永磁电动机和开关磁阻电动机[2]。
直流电动机制造成本高、重量体积大、碳刷寿命短、换向时碳刷易产生火花,不适宜高速大容量场合,有逐渐被淘汰的趋势。感应交流电动机由于其驱动系统复杂、功率因数低、小负荷范围内效率低、功率密度和效率低于永磁电机,逐渐失去其优势。永磁电动机不需要直流励磁电源,具有重量轻、体积小、惯性低、控制简单、效率高、调速范围宽、起动转矩大等优点,但电机含永磁材料,制造成本高,而且永磁材料在温度过高、过低、强烈振动情况下,有不可逆转的退磁现象,使电机性能下降。开关磁阻电动机具有结构简单、牢固、制造成本低、调速范围宽、速度响应快、控制灵活、起动电流小、起动转矩大的优点,作为电动汽车的驱动电机有很大的发展潜力[3],但开关磁阻电动机的转矩脉动和噪声较大,要在电动汽车中推广应用,必须解决这两个关键问题。
开关磁阻电动机的噪声随着电机设计的成熟会逐渐减弱,转矩脉动的产生主要是因为开关磁阻电动机必须工作在开关状态,通用工业场合中普遍以绕组电流为目标进行控制,换相时转矩不连续,因此转矩脉动大。转矩脉动引起的汽车振动不仅对机械结构危害很大,也降低了汽车乘坐的舒适性。本文参考交流电动机的直接转矩控制方法,根据开关磁阻电动机的运行原理进行了改进,应用直接转矩控制方法来减小开关磁阻电动机的转矩脉动,使其更适合于电动汽车应用。
1 开关磁阻电动机工作原理

图1 开关磁阻电动机结构
开关磁阻电动机为双凸极结构,定子上有集中绕组,每相对的两极为一相,转子上无绕组也无永磁体,电机整体结构简单,如图1所示。
电机运行遵循磁阻最小原理[4],当一相绕组通电时,与此定子凸极非对齐位置的转子凸极,由于磁拉力的作用运转到对齐位置。各相依次通电,即可实现电动运行,改变各相通电顺序,可改变电机运转方向。开关磁阻电动机的转矩T根据磁共能W来计算,即:


式中:Ψ(θ,i)为磁链。
开关磁阻电动机的每相绕组都是单极驱动,因此开关磁阻电动机的每相电流都是正的[5]。从式(2)可看出,转矩的正负取决于式(2)的后一项,即如果定子磁链相对于转子角度的变化率为正,转矩增加;如果定子磁链相对于转子角度的变化率为负,转矩减少。
开关磁阻电动机运行时的实际控制变量包括开通角、关断角、励磁电压和励磁电流上限。控制方法有电流斩波控制、角度位置控制、脉宽调制调压控制三种基本控制方法,其目的都是为了控制电机相绕组的电流。由于开关磁阻电动机的转矩除与电流有关外,还与定、转子的相对位置角有关,如果仅仅使电流平稳,在换相时会造成前一相的转矩开始降落而后一相的转矩尚未建立起来的现象,引起电机转矩脉动较大,限制了开关磁阻电动机在电动汽车场合的应用推广。
2 直接转矩控制
2.1 直接转矩控制原理
在交流电机控制中,直接转矩的基本思想是保持定子磁链幅值基本恒定不变,通过改变定子磁链与转子磁链的转角来控制转矩的增大或减小,即通过加速或减速定子磁链来控制转矩,从而把转矩限制在一个给定的滞环范围之内。

图2 三相半桥式功率变换器
2.2 电压矢量的选取
改变定子磁链与转子位置的夹角及磁链的幅值是通过选择不同的空间电压矢量来实现的,而空间电压矢量是由加在定子各相绕组上的电压公共作用形成的。在每一个确定的时刻,每相绕组都因开关状态的确定而有一个确定的电压状态,从而就有一个各相公共作用形成的确定的空间电压矢量。在不同时刻,每相选择不同的开关状态组合,就会确定出不同的空间电压矢量。本系统选择的是三相半桥式功率变换器,如图2所示。
功率变换器每相由两个主开关管和两个续流二极管组成,具有能量回馈功能,在电动汽车有限的电池能量储存情况下,有助于提高效率,节约能量。
人们希望如何从海量的数据中迅速的提炼出关键信息,为社会和企业带来价值。大数据分析的主要方法分为:统计数据分析方法、基于机器学习的分析方法、基于图的分析方法和自然语言中的分析方法。大数据的挖掘包括关联规则、分类分析、聚类分析等。常用的数据挖掘工具有:R语言、RapidMiner、 免费的Weka、KNIME以及Prange等。最典型的挖掘平台包括基于Hadoop的平台和基于Spark的平台。
根据每相两个主开关管不同的开通与关断情况,可分为三种开关状态。第一种情况是两个主开关管同时开通,这时加在绕组上的电压为正,定义为开关状态“1”;第二种情况是一个主开关管开通一个主开关管关断,开通的主开关管和这相的其中一个续流二极管构成闭合回路,这时电压为零,定义为开关状态“0”;第三种情况是两个主开关管都关断,绕组与此相的两个续流二极管构成闭合回路续流,这时电压为负,定义为开关状态“-1”。例如空间电压矢量v1(1,0,-1)表示三相功率变换器A相上下两个主开关管都开通,B相一个主开关管开通一个主开关管关断,C相两个主开关管都关断的状态。而空间电压矢量v2(0,1,-1)表示三相功率变换器A相一个主开关管开通一个主开关管关断,B相两个主开关管都开通,C相两个主开关管都关断。通过控制三相不同的开关组合,就会确定出不同的三相公共作用形成的空间电压矢量。这种三相半桥式功率变换器可确定出27个空间电压矢量。其中有些电压矢量因为功率变换器不能同时有两相被激励而被淘汰,还有一些电压矢量选择后会降低效率也被淘汰。每相不能从开关状态“1”直接到开关状态“-1”,或者从开关状态“-1”直接到开关状态“1”,应该是从开关状态“1”到开关状态“0”再到开关状态“-1”,或者逆序[7]。选用其中6个有效的空间电压矢量,这6个空间电压矢量均匀分布在坐标平面上,每个空间电压矢量彼此相差且幅值相等,把空间平面均匀地分成6个区,每个区对应的空间电压矢量及开关状态如图3所示。

图3 空间电压矢量
2.3 磁链定区
在交流电动机的直接转矩控制中定子磁链矢量可由式(3)得出,其在开关磁阻电动机中同样适用。

式中:ψs为定子磁链矢量;v为定子电压矢量;i为定子电流矢量;R为定子电阻。
为了将不断变化的磁链控制在滞环内,控制器需不断地从6个电压矢量中选出一个来满足这种情况。定子电压矢量可用来控制定子磁链矢量(特别是在低压时,这时定子电阻可忽略)[5],如果电压作用时间足够短,式(3)可写为:

可见定子磁链的方向与定子电压的方向一致,定子磁链幅值的大小与定子电压的幅值和作用时间有关。如果定子磁链在第K区,选择vK+1和vK-1可增加定子磁链幅值,选择vK+2和vK-2可减小定子磁链幅值,选择vK+1和vK+2可增加转矩,选择vK-1和vK-2可减小转矩。控制第K区定子磁链和电机转矩的开关表如表1所示,在表中⇑表示增加,⇓表示减小。

表1 开关表
为了把磁链和转矩控制在滞环内,必须知道瞬时的磁链和转矩的幅值以及磁链所在的区。在交流电机的直接转矩控制中瞬时磁链由式(5)算出,ψs0是定子磁链的初始值,对于开关磁阻电动机来说,每相的电流和磁链在一个电周期内都回到零,所以ψs0=0。每相的磁链幅值随着时间的变化而变化,但方向始终沿着定子极轴方向。

为了把三相磁链矢量整合成一个磁链矢量,把三相定子磁链所在的三相坐标系转换成两相静止坐标系如图4所示。
坐标转换公式:
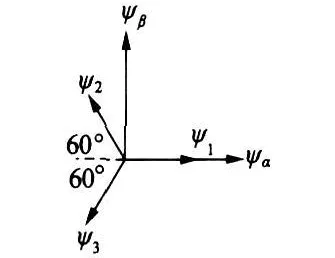
图4 α-β坐标系

定子磁链ψs的幅值和角度δ:

当ψα>0,ψβ>0或ψα>0,ψβ<0时,δ=arctan
当ψα<0,ψβ>0时,δ=arctan
当ψα<0,ψβ<0时,δ=arctan
当ψα=0时,若;若若ψβ=0,δ=0。
3 建模与仿真
3.1 电动汽车直接转矩控制仿真模型
本文使用的电动汽车直接转矩控制仿真系统原理图如图5所示,系统由电动汽车电机模块、磁链三相到两相的坐标转换模块、磁链矢量计算模块、磁链所在区间计算模块、转矩比较器和磁链滞环比较器、功率变换器的驱动开关表等部分组成。

图5 电动汽车直接转矩控制系统原理图
参照图5可在Matlab中建立仿真模型,本文选用Matlab模型中的开关磁阻电动机作为电动汽车驱动电机,参数配置为输出功率60 kW、三相6/4结构,瞬时转矩值可根据电机转矩特性查表而得。
3.2 仿真结果分析

图6 电流斩波控制时的转矩波形
建立仿真模型后,对直接转矩控制和电流斩波控制进行了仿真比较。图6是电流斩波控制在低速时的转矩脉动,从图中可看出,转矩脉动比较大,在一个周期内转矩的最大值为150 N·m,最小值为20 N·m,而且脉动频率较高,在电动汽车中应用时会带来严重的机械振动,影响汽车寿命。
图7是采用直接转矩控制的仿真结果。图7a是汽车踏板给定值是12 N·m时的仿真图,从图中可看出转矩被很好地控制在12 N·m上下很小的转矩脉动范围内。图7b是踏板给定值从零秒12N·m至0.1 s 20 N·m变为0.2 s 15 N·m的仿真图,从图中可看出,转矩响应很快,转矩脉动被控制在给定的转矩值上下很小的范围内。这种特性很适合电动汽车。
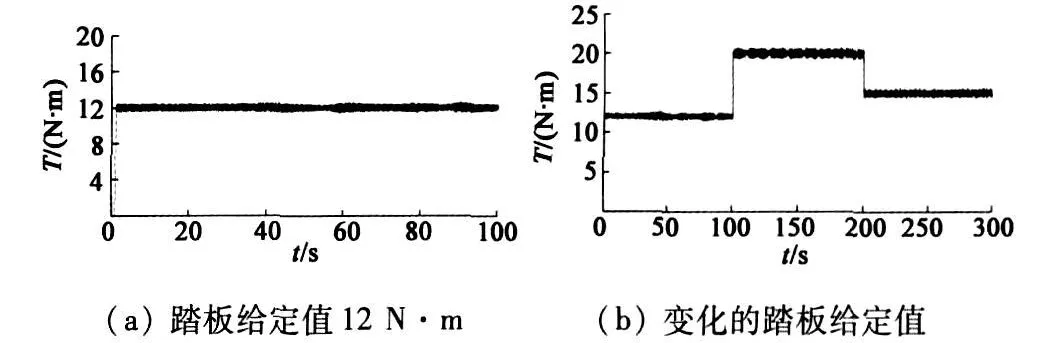
图7 直接转矩控制时转矩波形
图8是电流斩波控制与直接转矩控制的磁链轨迹。从图中可看出,直接转矩控制的磁链轨迹(图8a)是一个圆形,幅值基本恒定,被限定在滞环内,远远好于电流斩波控制的磁链轨迹(图8b)。
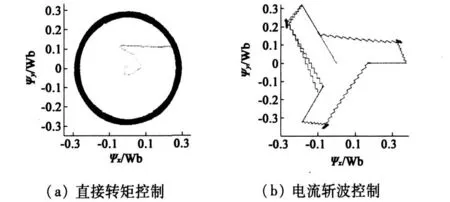
图8 磁链轨迹
仿真结果证明,直接转矩控制能把磁链很好地控制在滞环内,磁链轨迹为一圆形,这种圆形磁链轨迹的控制能降低脉动,而且还能降低电机损耗,整体控制效果明显好于电流斩波控制,适合于电动汽车有限能量的情况。
电动汽车对转矩的要求是开环系统,直接转矩控制很好地满足了这一要求,直接给定控制转矩并把转矩脉动控制在较小的范围内,满足具有高性能电子系统的电动汽车要求,而且消除了在低速时剧烈的震动对电动汽车的影响。
4 结 语
直接转矩控制与电流斩波控制相比转矩具有可控性,直接转矩控制是把磁链控制在滞环内,产生一个圆形的磁链轨迹,这种圆形轨迹的控制可降低电机损耗,而且直接控制转矩把转矩控制在滞环内,降低了转矩脉动,从仿真结果来看其转矩脉动远远小于电流斩波控制产生的转矩脉动,非常适合具有高性能电子系统的电动汽车控制。
[1] 陈清泉.电动车的现状和趋势[J].机械制造与自动化,2003(1):1-4,19.
[2] 王书贤,邓楚南.电动汽车用电机技术研究[J].微电机,2006,39(8):83-85.
[3] 全力.车用SR电机的研发现状[J].拖拉机与农用运输车,2005(6):54-56.
[4] 王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,1999:3-4.
[5] Cheok A D,Fukuda Y.A new torque and flux control method for switched reluctance motor Drives[J].IEEE Trans.on Power Electron,2002,17(4):543-557.
[6] Jeyabharath R,Veena P,Rajaram M.A Novel DTC strategy torque and flux control for switched reluctance motor Drive[J].IEEE Drives and Energy Systems for Industrial Growth,2006,17(4):1-5.
[7] 陈丽莉.开关磁阻电机直接转矩控制策略的研究[D].长沙:中南大学,2008.