电动自行车用无刷直流电动机控制器设计
2010-11-20王晓旭杨贵杰
杜 丹,王晓旭,杨贵杰
(哈尔滨工业大学,黑龙江哈尔滨150001)
0 引 言
发展绿色交通工具已成为当代社会一个重要课题。相对于燃油交通工具,电动车拥有灵活、轻巧、零排放、价格低廉等优点,具有广阔发展前景[1]。考虑到我国目前的国情,发展电动车具有极高的市场价值和重要的环保意义。而永磁体的可靠性、日益降低的成本及半导体工艺技术的提升,使永磁电机成为众多工业产品应用的首选[2]。无刷直流电动机具有效率高、功率因数高、转矩大、控制简单、维护费用低等特点[3],被广泛用作电动自行车的驱动电机。但考虑到电动自行车是民用产品,驱动与控制系统的可靠性与低成本是系统设计的关键问题。
目前,国内外的电动自行车驱动电机多采用外转子结构,以三路开关型霍尔作为位置传感器,方波电流驱动方式。本文研究的控制对象也是类似结构,电机本体如图1所示,外转子式三相永磁无刷直流电动机,极对数为8,功率350W,速度调节范围80~220 r/min,工作电压24 V、36 V和48 V。
本文主要研究电动自行车用无刷直流电动机的控制器设计问题,目标是在满足系统对动态性能和保护性能要求的前提下,开发出主控芯片功能完备、硬件电路结构简单、总体成本具有价格优势的电动自行车驱动控制器。为此,设计方案中采用Microchip公司的PIC16F72单片机作为核心控制芯片,采用高性能集成驱动芯片IR2103驱动MOSFET组成全桥逆变电路。完成了驱动控制器的软硬件设计,并通过带负载调速及检测报警功能的试验,验证了设计方案的合理性和工程实用性。

图1 外转子式电动自行车用无刷直流电动机
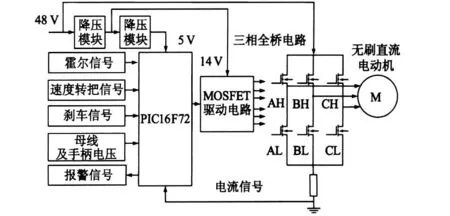
图2 控制系统硬件结构
1 控制系统功能设计
电动自行车的特点是车载电池供电,车速(即电机转速)、刹车等控制信号均要由手柄给定,而且安全性要求较高,需要设置较为完善的保护措施。
本文所设计的控制系统硬件结构如图2所示,主电路由蓄电池供电,作为逆变桥的母线电压。逆变桥由6个MOSFET驱动永磁同步电机。其触发信号由单片机给出,再经过专用驱动芯片提供[4]。其中各类故障报警信号由闪烁频率不同的光信号显示,用户可根据闪灯频率判断故障发生原因并及时进行处理。
根据要求,本系统所设置的功能为:
(1)平稳起停。暂设电机的最高转速为400 r/min。
(2)平滑调速。具有电机转速闭环系统,负载变化时进行PI调节。
(3)定速巡航。若想让转速维持在某一特定值不发生变化,防止系统调节频繁,则通过程序判断,若手柄电压固定在某一值附近超过8 s,则认为起动定速巡航,此时即使手柄归位,速度仍维持不变,当手柄电压再次升高时,退出巡航状态。
(4)完善了各种保护措施,主要有:
(a)过压及欠压保护。系统供电电压48 V,当检测到电压超过60 V时或低于46 V则实行保护,PWM输出全低状态。
(b)过流保护。有效保证了电机和控制器的可靠运行,并有效遏制电池放电过大。
(c)手柄电压超限保护。按5 V供电,动作点1.2~4 V。超出范围则分别维持最低转速或最高转速。另外附加掉线及短路保护,若手柄电压高于4.7 V或低于0.3 V,则认为发生手柄线路掉线或短路,此时驱动电路无输出信号,同时报警。
(d)电机霍尔信号保护。如果检测到霍尔信号掉线,即三路信号输入全低的情况出现,则停车保护,同时报警。
(e)堵转保护。电机堵转超过3 s,则单片机停止输出,有效保护电机和电池。
(f)温度过高保护。当功率电路散热器温度达到75℃时脉宽减小50%并告警,且每上升10℃降低10%脉宽,超过95℃时,停车保护。
(g)防冲车保护(HPD保护)。需起动电机时,如果手柄被卡住或因其他原因未归位到初始位置,电机不起动。当调速手柄回到接近初始位置时再起动。
(h)重载起动防抖。在电机起动后校对霍尔值,如果正确则变量加,如果霍尔变化连续三次正确,则认为电机已起动,反之,则认为重载电机无法正常起动,需检查负载情况。
2 驱动电路硬件设计
本设计中采用了Microchip公司的PIC16F72可编程单片机,通过软件调试可适应不同规格的无刷直流电动机参数。选用该芯片的主要优势有:
(1)在价格方面,8位单片机即可满足系统控制的精度要求,PIC16F72单片成本及开发系统具有较高的性价比。
(2)在性能方面,由于整个系统有多种模拟参数需要转化为数字量,因此选用的单片机需具备多通道A/D转化模块,并且应具有至少一路PWM输出口。中低端的PIC16F72具有1个集捕获、比较、脉宽调制三项功能于一身的CCP模块(Capture/Compare/PWM Module),8位多通道的A/D转换器,电源电压低侦测、电路掉电复位等功能,可以将多种模拟参数转化为数字量,实现脉宽调制PWM(Pulse Width Modulation)。同时在安全因素上,作为控制系统的核心,PIC单片机的可靠性也可达到系统规定。
硬件核心部分设计如下:手柄给定电压范围为0~5 V,由PIC单片机AN2通道采样。电机的霍尔信号分别输入到单片机B口的三位RB4、RB5、RB6。由于PIC单片机B口高位具有电平变化中断的功能,当霍尔信号发生变化时引发中断进入换相子程序。触发信号由单片机C口输出,六路信号由单片机分别控制,互不影响。采用高性能专用驱动芯片IR2103对PIC16F72信号的驱动电流进行放大,然后直接驱动IRF540N。
另外,通过软硬件结合的方式,在负载变化时对电机实现了速度PI闭环调节。PIC16F72的基本电路如图3所示。
3 控制系统软件设计
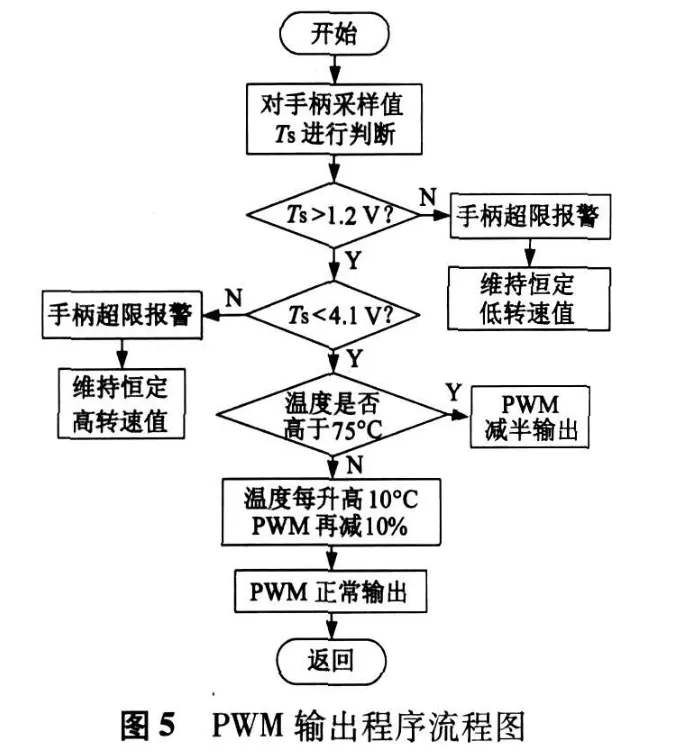
结合硬件电路和电动车的实际需求特性,编制了无刷直流电动机的驱动与系统控制程序,用以完成电机的基本运行、闭环调速,以及防冲车、过压欠压、过流、温控、手柄超限、霍尔断线、手柄故障报警等各种保护功能。信号采样及AD转换子程序流程图如图4所示,PWM输出程序流程图如图5所示。

4 试验结果及分析
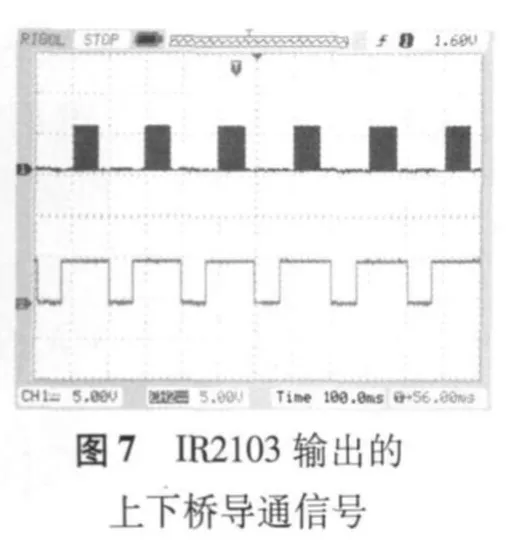
根据上述设计完成的控制器样机如图6所示,试验中的电池电压为36 V。功率部分的场效应管驱动方式为单极性单边PWM调制,上桥臂为PWM控制状态,下桥臂导通期间为常开状态。图7为某一转速下A桥驱动芯片的2路输入信号经过IR2103的转化后,输出控制A桥上下MOSFET的栅极导通信号。
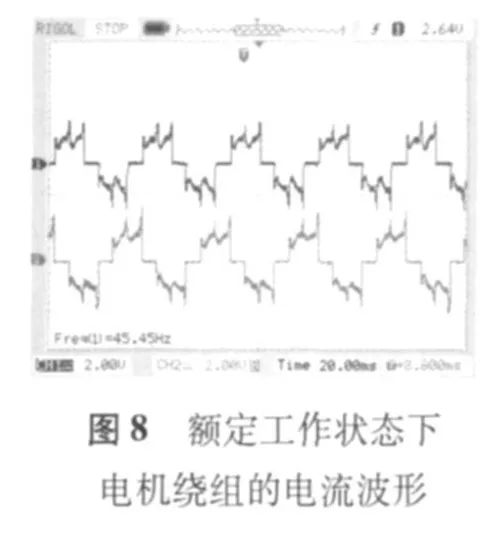
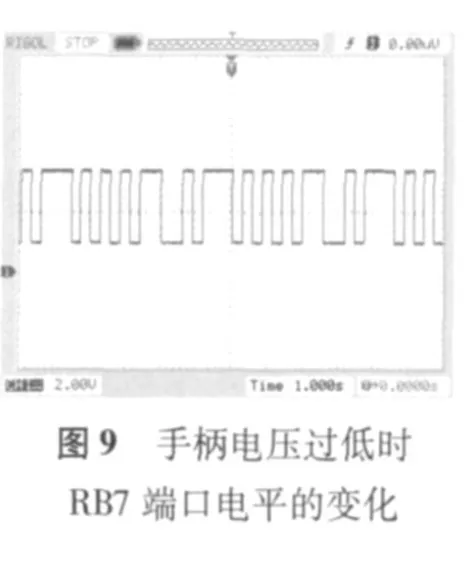
额定工作状态下电机绕组的电流波形如图8所示,电机电流频率45.45Hz,电机转速150 r/min,电流有效值1.3 A。图9为手柄电压过低时,控制系统RB7端口的电平情况,此时LED闪烁报警,闪烁信号频率5Hz,闪烁延时0.8 s。
5 结 语
本文研究了基于PIC16F72单片机的电动车用无刷直流电动机控制器,进行了系统的软硬件设计,研制了样机系统,并进行了特性测试和保护功能测试。该控制器结构简单,外部器件少,关键功能通过软件编程来实现,可以针对不同的控制对象采用不同的控制算法[6],具有很好的灵活性和适应性。试验结果表明,该控制器在车速控制性能、行驶保护功能、运行可靠性、维护的便利性等方面都有良好的性能,而且性能价格比优良,是民用电动车无刷直流电动机驱动控制器的一个较好的解决方案,具有很好的实用价值。
[1] 江建中,李永斌.电动车电机及其控制系统的研究现状和发展前景[C]//第七届中国小电机技术研讨会论文集.上海:2002:6-20.
[2] Patel N,Madawala U.Brushless DC Motor Control Using Bit-Streams[C]//IEEE 2008 10thIntl.Conf.on Control,Automation,Robotics and Vision.2008:85-90.
[3] Lin C T,Hung CW,Liu CW.Position Senserless Control for Four-Switch Three-Phase Brushless DC Motor Drives[J].IEEE Tran sacionson Power Electronics,2008,23(1):438-444.
[4] 王立欣,王宇野,王丰欣.基于DSP的电动车用永磁同步电机的控制方法[J].电机与控制学报,2005,9(1):51-54.
[5] 顾伟光,章跃进,黄苏融.提高无刷直流电机PWM调制频率极限的方法[J].微特电机,2003,1:23-24.
[6] 周扬,葛英辉,倪光正.DSP在电动车应用中的几个关键问题[J].电机与控制学报,2006,10(6):580-584.