机载激光雷达数据提取DEM的关键技术分析
2010-11-15靳克强龚志辉汤志强
靳克强,龚志辉,王 勃,汤志强
(1.信息工程大学 测绘学院,河南 郑州 450052;2.96633部队,北京 100096)
机载激光雷达数据提取DEM的关键技术分析
靳克强1,2,龚志辉1,王 勃1,汤志强2
(1.信息工程大学 测绘学院,河南 郑州 450052;2.96633部队,北京 100096)
结合激光雷达数据的特点,着重分析利用激光LiDAR数据提取DEM的几个关键技术:预处理技术、滤波技术、DEM构建与质量评价技术。通过分析,为快速、高效、准确地获取DEM基础数据提供一个技术方案。
机载LiDAR;数据预处理;滤波;DEM;质量评价
随着数字时代的到来,人们对于数据的需求与应用呈现指数级的增长。如何快速、高效、准确地获取、处理、分发、应用数据成为科研学者们的研究热点。在人们关注的数据中,地球空间信息数据成为21世纪支撑人类三大高新技术——地球空间技术(Geo-Spatial Technology)、纳米技术、生物技术之地球空间技术的重要基础数据。
20世纪80年代末,机载激光雷达(Airborne-LiDAR)测量技术作为一种新兴的空间对地观测技术,在多等级三维空间信息的实时获取方面产生了重大突破,引起了测绘、林业等相关行业的浓厚兴趣。随着相关技术的发展以及社会需求的不断扩大,机载激光雷达测量技术的发展日新月异,机载激光雷达测量系统实际上已经代表了对地观测领域一个新的发展方向[1]。
LiDAR(Light Detection And Ranging)是一种主动式对地观测系统,它集成了 GPS、惯性导航、激光测距等先进技术,具有控制测量依赖性少、受天气影响小、自动化程度高、成图周期短等特点,可能为测绘行业带来一场新的技术革命。机载激光雷达技术能够快速获取精确的高分辨率的数字地面模型以及地面物体的三维坐标,非常适合DEM的制作,而且具有采集速度快、高程精度高、处理成本低等特点,同时具备全天候作业及海岸测量、水下地形测量等优点。因此,利用机载LiDAR数据提取DEM,成为最近几年测绘生产以及其他领域的一个热点,在摄影测量与遥感及测绘等领域具有广阔的发展前景和应用需求。
1 LiDAR数据特点与预处理分析
机载LiDAR测距的基本原理,是利用发射器发射激光或者连续波,通过空气传播直接投射到所观测的地形、地物表面,这些电磁波经过地形、地物的反射,被探测器所记录。发射器和探测器采用相同的时间基准,通过记录电磁波从发射到反射回所需的时间,利用光速不变原理,进行非接触测距。由于机载LiDAR探测技术集 GPS、INS、激光测距技术于一身,它获得的数据不仅包含距离(斜距)信息,还包括 GPS动态定位信息以及INS姿态测量信息。要进行后续的点云数据滤波,必须对原始的机载LiDAR数据进行预处理。
1.1 原始机载LiDAR数据误差预处理
机载激光雷达系统在测量过程中,会受到多种误差源的影响。其中系统误差会给激光脚点的坐标带来系统偏差。基于机载激光雷达的系统构成,主要的误差分为4类:GPS定位误差、GPS/INS组合姿态定位的测角误差、激光测距误差以及系统集成误差。针对 GPS定位误差不易消除和模型化的特点,采用在测区内建立多个分布较为均匀的基准站或采用精密单点定位(PPP)技术加以改正。对于GPS/INS组合姿态定位误差,根据组合元件特点,采用降低飞行高度等方法减弱其影响。相比前两种误差,激光测距误差具有相对稳定的误差改正模型,通过检校场的方法减小误差。系统集成误差,则与各个系统的工艺集成有关,由于各个测量单元独立工作,数据采样率不同,必须把它们统一到同一个时间系统中。
1.2 机载LiDAR数据的组织与划分
机载LiDAR系统能快速、高效、准确地获取被测目标的三维地理坐标信息,适合中小区域大比例尺测图的需要。然而,由于机载激光雷达系统是主动式非接触探测被测目标,它所获取的数据具有一定的盲目性,经过原始机载LiDAR数据预处理后,得到激光点云数据。如何高效组织这些数量庞大激光点云数据成为相关领域的研究热点之一。为此,美国摄影测量与遥感协会(ASPRS)下的LiDAR委员会专门推出了LiDAR数据的*.las标准格式。目前存在las 1.0、1.1、1.2与 2.0(拟定版)4种版本,其主要目的在于可使LiDAR数据在不同硬、软件之间实现交换和存储[2]。同时,由于各个商家的竞争关系,硬件技术参数无法统一,导致LiDAR数据的格式仍然与提供商的硬件有关,例如Leica公司的仪器采集的LiDAR数据采用ASCII形式的Pts、Ptx格式存储;TerraScan软件处理后的LiDAR数据格式采用二进制的Bin、Ts格式存储等等[3]。
滤波前,需要按照一定的格式读入数据,然而点云数据的数目动辄就是几万个以上。为了快速获取指定范围内的点云数据就成了一个迫切需要解决的问题。对此国内外学者提出了不同的数据组织形式,总体上可分为 KD树和格网组织方式两大类。KD树(K维搜索树)是把二叉搜索树推广到多维数据的一种主存数据结构[4](见图1)。
格网组织形式,就是把激光点云数据按照一定的划分尺度进格网化。它的原理就是按照划分尺度对原激光点云进行重新划分,同时标识划分后的数据分块,应用该分块时,只需检索其对应的标识号,再调出数据,如基于均匀格网划分的分布式组织及并行处理方法[5]。

图1 KD树的几种组织形式
2 几种典型的滤波算法
机载LiDAR数据滤波,就是把地面激光脚点与地物激光脚点分离的过程。它是基于邻近激光脚点间高程突变,一般不是由于地形突然变化引起的基本原理。国外已经有相对成熟的商业软件专门处理机载LiDAR数据滤波分类,如 TerraSolid中的模块 TerraScan、InPho中的模块SCOP++等。这些商业软件采用的滤波算法,详情至今还是核心商业机密而不被外人所知。以下介绍几种典型的滤波算法。
2.1 基于多分辨率分析的数据滤波算法
多分辨率分析的数据滤波算法(Wavelet Filter,W F)是 TerraScan中自动滤波功能的主要支持理论,多分辨分析就是求出信号在子空间序列{Vj,j∈Z}中的近似表示,即求出信号在每个子空间中的投影(见式(1))。在不同尺度空间中获取的投影,组成了信号的多层次、不同分辨率的表示。相临两层之间的分辨率相差2倍。
其实质就是获取多尺度的数据描述,从而建立数据金字塔,为数据处理提供一个由粗到细的模型。因此,把多分辨率分析理论引入到机载LiDAR数据滤波的关键步骤也就是建立多尺度的激光点云数据描述[6]。其中尺度函数的傅立叶变换表现为低通滤波器的性质,经投影变换后,信号的细节特征会丢掉,多层数据中的最上层数据应该主要是地面点。因此,在具体建立多层、多分辨率的激光点云数据时,可以用选取局部高程最低点这一操作作为投影变换(见式(2))作用于激光点云数据获取(见图2)。

式中:i为点号下标,R×R表示半径为R的窗口。
此算法的关键就是选择分辨率尺度,选择时应该保证最上层的激光点云近似描述只包含有地面
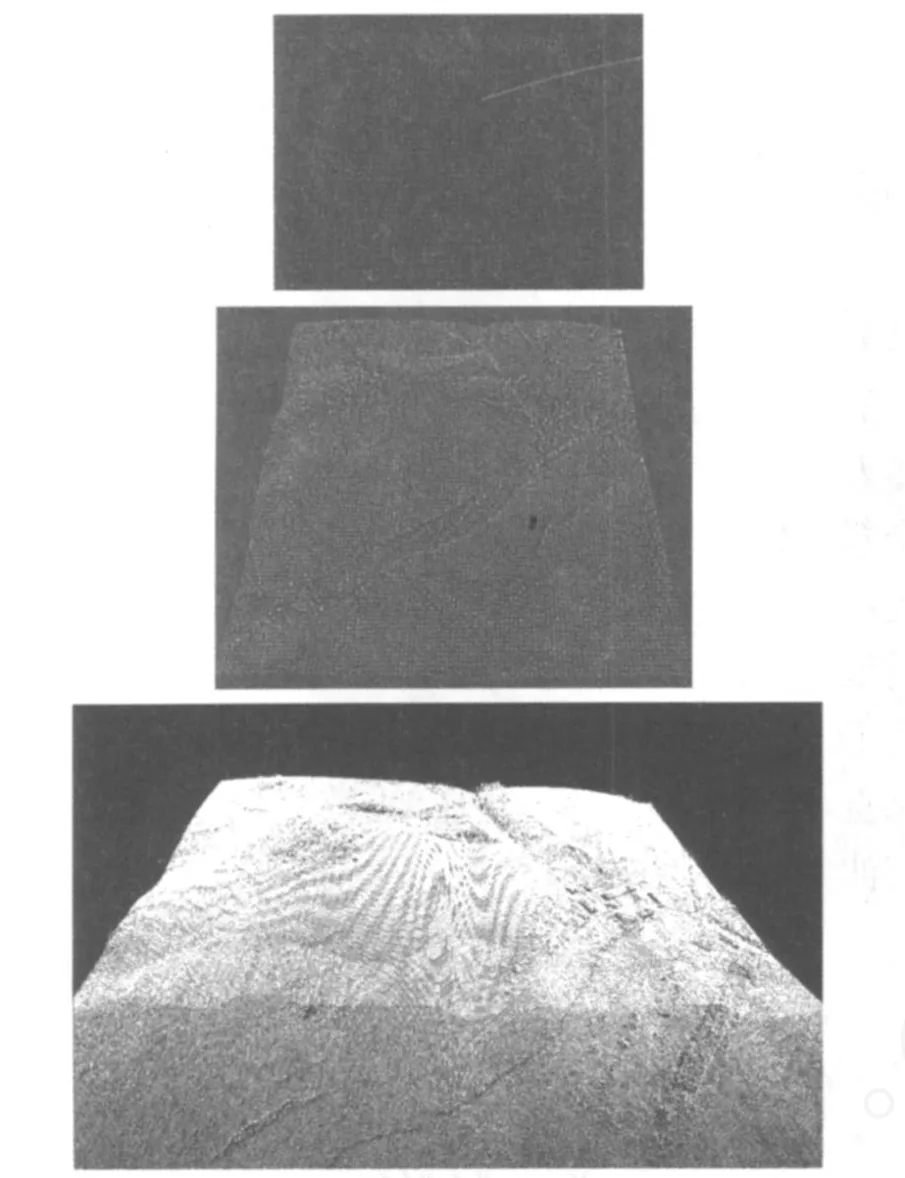
图2 点云数据的多分辩率表示
点。具体计算步骤,即首先选择合适的分辨率尺度,建立多个子空间,然后把原始激光点云数据在每个子空间中做Riesz基下的投影变换,从而获得不同分辨率、不同层次下的激光点云数据描述。最终获得最上层的地面点数据。
2.2 多级移动曲面拟合滤波算法
多级移动曲面拟合滤波算法(Hierarchical Moving Curved Fitting A lgorithm,HMCFA)是基于移动曲面拟合滤波算法的改进。后者是武汉大学学者张小红在2004年提出的[7],在他的专著中也有详细论述。移动曲面拟合滤波直接对离散的激光点云进行数据滤波,对提取DEM而言,粗差也被过滤。它的基本原理是:随着激光点云采样密度的提高,激光脚点之间的邻接关系就反映了地形表面的趋势变化。任何一个复杂的空间曲面,它的局部面元可以利用一个简单二次曲面(见式(3))去逼近拟合;当局部面元小到一定程度时,可近似表示成一个平面(见式(4))。两式中的参数 a0到 a4是曲面拟合参数。

具体来说,先将这些离散的激光脚点数据进行二维排序,然后选取种子区域开始滤波。找出种子区域内相互邻近的最低的几个点为初始地面点,确定一个初始曲面。进而将邻近的待选点代入初始曲面,计算待选点的拟合高程。如果待选点的拟合高程与其观测高程之差,超过给定的阈值,则认为此点不是地面点而被过滤;否则,就接受该点为地面脚点。利用新接受的地面脚点和部分初始地面点重新确定一个局部趋势曲面,去求邻近待选点的拟合高程,比较阈值,判断是否接受此待选点。不断重复,就相当于有一个简单的移动曲面在过滤整个测区,完成滤波过程(见图3)。
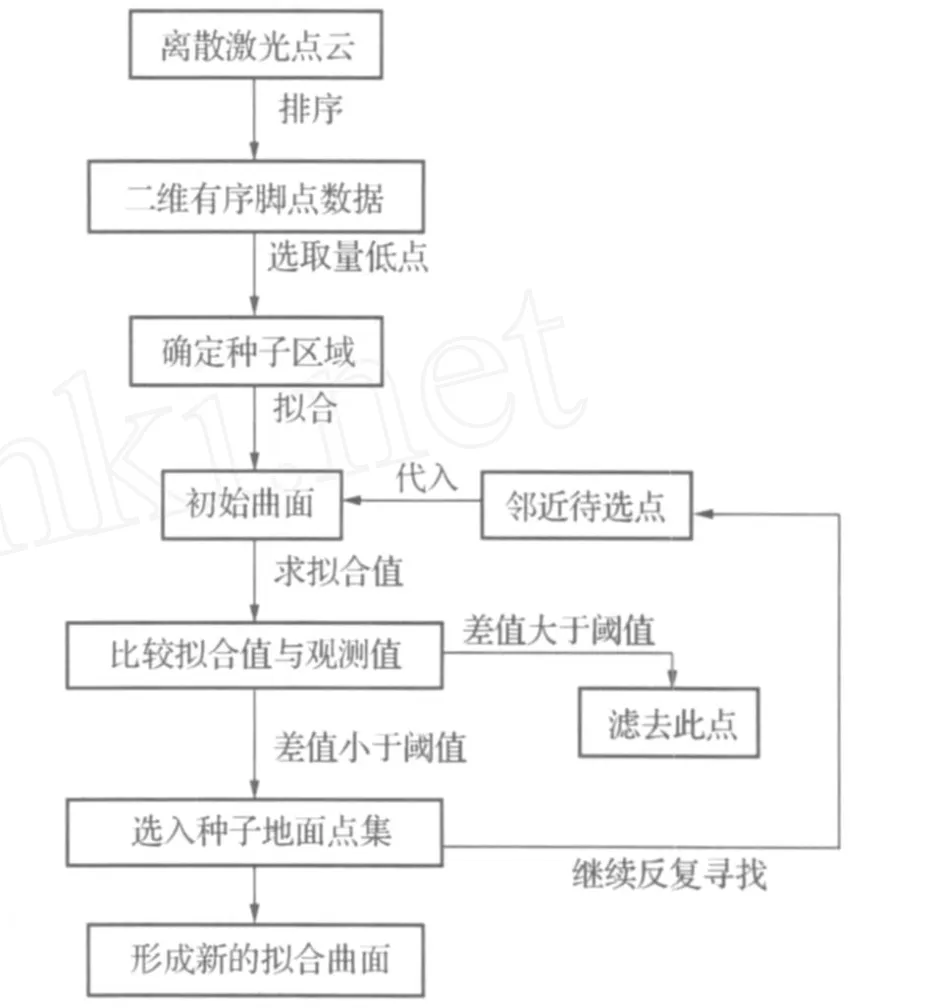
图3 多级移动曲面拟合滤波算法流程
而多级移动曲面拟合滤波,是基于移动曲面拟合滤波算法的基本原理,先给定一个窗口,在此窗口内寻找适当数量的能拟合初始曲面的最低激光脚点,建立粗地表趋势面。然后将窗口尺寸扩大,设置自适应阈值,通过多次迭代得到较为精细的地表[8]。
2.3 等高线的表面估计滤波
等高线的表面估计滤波(Filtering M ethod based on Contours,FMC)是基于激光LiDAR系统获取的点云数据特点提出的[9]。原始激光数据预处理后,利用一定的内插方法,获得激光点云DSM数据。在此基础上,按照相应的数据密度,等距离内插出等高线。根据DSM等高线的特征,如闭合性、首尾点距离、等高线长度、等高线间距等判别准则,设定相应的阈值自动提取属于自然地表的等高线段,获得初始的自然地表点,然后内插生成初始DEM,最后使用迭代法逼近生成最终的DEM(见图4)。此算法适用于地形起伏较大的区域,不需要均匀分布的以道路网提取的种子点。
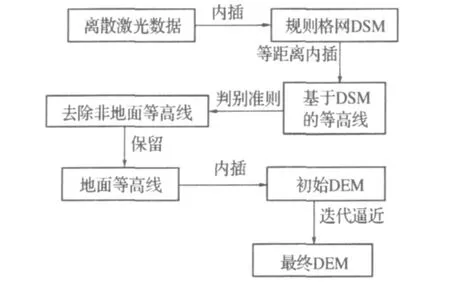
图4 等高线的表面估计滤波流程
3 DEM的构建与评价
对于滤波后的激光点云数据,使用何种方法使其构成DEM,也是机载LiDAR研究中的一个热点。目前存在的DEM构建模型主要有:规则格网模型、不规则三角网模型等[10]。其本质是将离散的激光点云数据通过一定的内插算法重采样,形成规则格网或不规则三角网。其中用于内插出规则格网模型的算法有:线性内插、距离倒数加权插值、径向函数插值、三角网线性插值等。
滤波后构建的DEM数据,如何对其进行质量评价,目前还未形成一个统一的标准机制。根据笔者研究,既然最终构建的DEM数据是经过算法滤波和算法内插出来的,就应该对这些算法本身进行评估,此称为内部评价。包括算法本身的严密性,即有无对激光点云坐标的改化以及增减位于关键地形处的点云数目;算法本身的适应性,即能否在多种复杂的地形中保持优良的滤波性能。另外评价构建生成的DEM质量,还必须使用多源数据来综合评价,例如利用同步获取的高分辨遥感影像形成的立体模型、同期普通航摄获取的DEM数据等,此称为外部评价。通过内部与外部评价的综合,给出相应的精度参数指标。目前,滤波以及滤波后构建DEM的质量评价标准还未形成,研究者只是根据具体的滤波区域给出了一定的质量评价,还远未形成成熟的统一评价体系。
4 结束语
本文结合激光雷达数据的特点,着重分析了利用激光LiDAR数据提取DEM的几个关键技术:原始激光雷达数据的预处理,包括数据组织、读入等;激光雷达数据的滤波,分析了几个经典实用的滤波算法;最后对DEM的构建和质量评价作了分析。随着激光测量系统的性能提升,激光脚点数据密度会越来越大,这就要求必须有快速、高效的处理算法支持。结合多源数据融合技术,提高点云数据滤波的效率与精度,充分发挥相互优势,对期望获得理想的DEM结果具有重要意义。每种滤波算法各有优缺点,能否提出一种自适应的、智能化的、普适性的滤波算法,将是今后研究的一个方向。
[1]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007:2-3.
[2]刘春,姚银银,吴杭彬.机载激光扫描标准数据格式的分析与数据提取[J].遥感信息,2009(4):38-42.
[3]ANDRE SAMBERG.An imp lementation of the ASPRS LAS standard[J].IAPRS Volume,XXXV I,Part3/W52,2007.
[4]吴涵,杨克俭.基于 KD树的多维索引在数据库中的运用[J].计算机应用,2007,26(9):37-39.
[5]王宗跃,马洪超,徐宏根,等.LiDAR数据的分布式组织及其并行获取方法[J].武汉大学学报:信息科学版,2009,34(8):936-939.
[6]王刃.机载LiDAR数据滤波与建筑物提取技术研究[D].郑州:信息工程大学,2008.
[7]张小红,刘经南.机载激光扫描测高数据滤波新算法[J].测绘科学,2004,29(6):50-53.
[8]苏伟,孙中平,赵冬玲,等.多级移动曲面拟合LiDAR滤波算法[J].遥感学报,2009,13(5):833-839.
[9]任自珍,岑敏仪,张同刚,等.基于等高线的表面估计滤波算法[J].遥感学报,2009,13(1):91-96.
[10]吕献林.多源数据辅助机载LiDAR数据生成DEM方法研究[D].武汉:中国地质大学,2009.
Key step analysis of extraction DEM based on L iDAR data
JIN Ke-qiang1,2,GONG Zhi-hui1,WANGBo1,TANG Zhi-qiang2
(1.Institute of Surveying and Mapping,Information and Engineering University,Zhengzhou 450052,China;2.96633 Troops,Beijing 100096,China)
The paper analyses the key step extraction DEM from Airborne-LiDAR data in detail,and the key step including LiDAR point cloud data p rep rocessing,the data filtering,DEM structure model and DEM quality assessment.And it is also p rovided a fast,efficient,exact data p rocessing scheme.
Airborne-LiDAR;data p rep rocessing;the filtering;DEM;quality assessment
P237
A
1006-7949(2010)06-0039-04
2010-03-12
靳克强(1984-),男,助理工程师,硕士研究生.
[责任编辑刘文霞]
