粒子成像测速
——非介入式全场技术
2010-11-07刘玥梁忠生鲍锋
刘玥 梁忠生 鲍锋
厦门大学物理机电学院航空系 361005
粒子成像测速
——非介入式全场技术
刘玥 梁忠生 鲍锋
厦门大学物理机电学院航空系 361005
引言
从普朗特1904年利用自己设计的手摇式水槽观察机翼及其他模型(圆柱体,球体等)的周围流场开始,人们就已经掌握了如何运用流动显示技术来对流场的结构等信息进行实验研究。但在当时的技术水平下,却只能对流场进行定性的描述,无法得到流速定量的数据。传统的定量测量方法,如热线、多孔测压探针、激光多普勒测速(laser Doppler velocimetry, LDV)技术,虽然能够较精确的得到单点定量数据,但在非定常复杂流动的研究中却难以得到流动的瞬时全场信息。且在一些介入式测量(热线,探针)中,由于测量设备的介入扰乱了流场,而无法准确得到一些特定区域(如边界层和激波)的流场信息。
PIV作为一种非介入式全场技术,是从80年代初第一次在文献中出现[1]后开始发展的。起初的PIV技术应该说是从激光散斑干涉测量技术发展而来的。激光散斑干涉技术(Laser Speckle Interferometry)原先是用于工程结构中的,可以检测复合材料材料的变形[2],得到材料的热膨胀系数[3]。其基本原理是通过双曝光得到散斑图,经图像处理后提取出所需要的信息。在过去20多年里,随着光学,激光,电子,摄像和计算机科学技术的进步,PIV经历了从模拟技术到数字技术的转变,已经发展成为一种比较成熟的具有自己特色的流场测试方法。图1[4]所示是光学速度测量技术的进展,可以看出,光学测量是从单点到二维再到三维的实现。随着技术的进步,利用立体、多域、全息甚至是断层技术来实现复杂流场的全场观测已经成为可能。
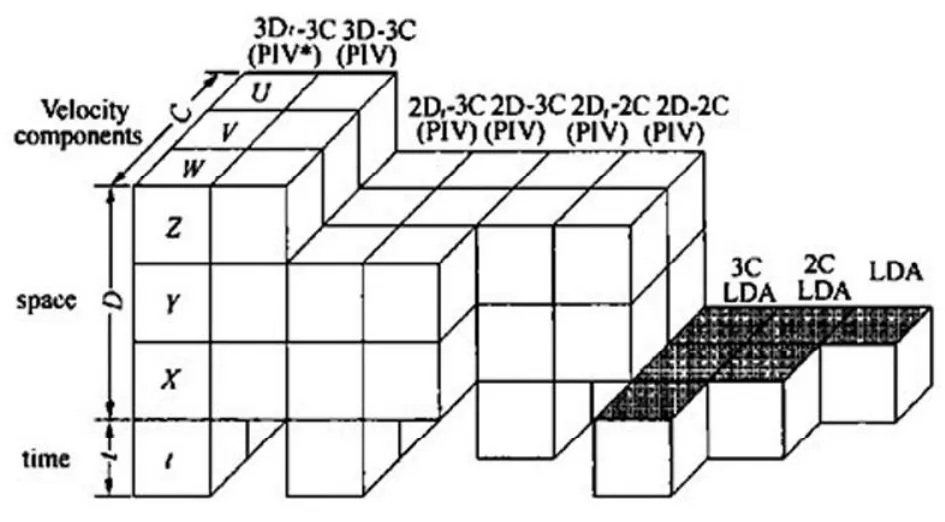
图一 光学速度测量技术水平进展
如今,国内外很多科研机构和商业公司都对PIV的应用做了大量实际工作,德国LAVISION公司,丹麦Dantec公司和美国的TSI公司和国内的北方立方天地公司已经能够提供各种PIV设备和实验方案。而分别在2001、2003、2005年举行的PIV challenge[5][6][7]汇集了全世界很多研究组对PIV图像处理技术的贡献,通过比较这些研究成果,探讨和改良了PIV算法。
本文对PIV的发展及工作原理进行了简要描述,重点讨论PIV的几个核心技术,最后对PIV的发展趋势进行简单的探讨。
1 PIV基本原理
PIV是一种基于光学的速度测量技术,主要是通过在流体中加入跟随流体运动的示踪粒子,这些粒子在流经一个特定平面时被连续照亮两次,利用照相技术将被照亮的粒子记录起来,通过图像的后处理,就能够得到粒子在两次照亮的时间间隔中的位移,从而得出流体的速度场。
PIV系统由硬件和软件两部分组成,硬件部分主要包括控制电路、CCD(CMOS)相机、光源、图像采集电路、采集图像所用的计算机和抓取同步信号的计算机等。软件部分包括系统的控制软件和分析软件。控制软件主要包括进行图像采集的控制程序和同步程序以及比例标定程序。分析软件由两部分组成:一部分是粒子图像处理和分析,第二部分是流场速度矢量的实现和修正。
图2是PIV应用的简单原理图。散播在流场中的跟随性及反光性良好的示踪粒子,由激光光束首先入射到一组球面透镜上,经聚焦后通过全反射镜至一组可调的柱面透镜形成具有一定厚度的片光,照亮流场中特定的区域,此时经过此区域的示踪粒子被照亮,通过CCD(CMOS)成像设备进行成像。对这个特定的区域在一定时间间隔内利用激光脉冲连续照亮两次,就能得到粒子在第一次照亮时间
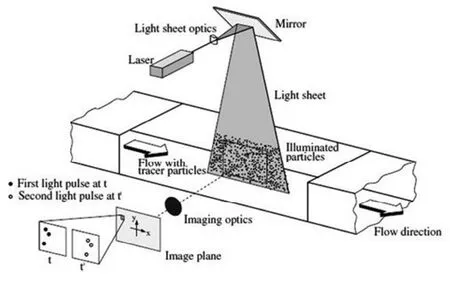
图2 粒子成像测速示意图
t和第二次照亮时间t’的两个图像,对这两幅图像进行互相关分析[8],就能得到流场内部的二维速度矢量分布。
我们可以简单的对其数学模型进行描述。假设流场中某一示踪粒子在二维平面上运动,其在x,y两个方向上的位移随时间的变化为x(t),y(t),是时间t的函数,那么,该示踪粒子所在处的流体质点的二维流速可以表示为公式2.1:

PIV技术就是通过测量示踪粒子的瞬时平均速度实现对二维流场的测量。图3(a)是单个流体质点的位移示意图,图3(b)是示踪粒子移动示意图,通过测量多个示踪粒子的瞬时平均速度就可以实现对二维流场的测量。

图3(a)
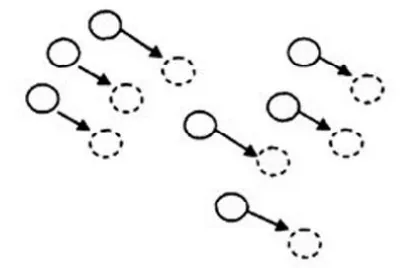
图3(b)
综上,可以看出PIV实际上是一种基于光学的测量方法,其相关技术主要涉及以下几个方面:示踪粒子、流场照明、图像记录技术、算法。针对影响PIV测试性能的这几个方面,对它们进行简单介绍,可以更好的了解PIV的工作原理及其技术局限。
2 示踪粒子特性
PIV系统在对流场速度进行测试时,实际上是通过测量流场中示踪粒子的位移来间接得到流体质点的位移,从而推算出质点的瞬时速度,得到流场信息。因此,示踪粒子是否能够准确的反映实际流体质点的位置决定了PIV测试系统的准确性。如果流体的密度同示踪粒子的密度不相同,就会由于重力的影响而对测量结果造成误差。因此示踪粒子必须要足够小,才能保证良好的跟随性,但是又不能太小使其光反射性能无法满足相机的要求,而降低了其成像可见性[9][10][11]。
适用于PIV研究的粒子种类十分广泛,理论上来说,只要能够保证良好跟随性和光散射性的粒子,无论是什么材质或形式都可以运用。即使是水中自然生长出的藻类也能够得到质量很好的图像。表1和表2分别给出了运用于水中和空气中示踪粒子的种类。
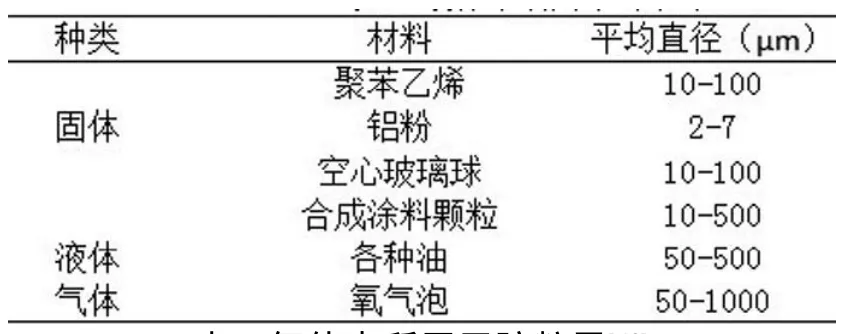
表1 液体中所用示踪粒子[12]
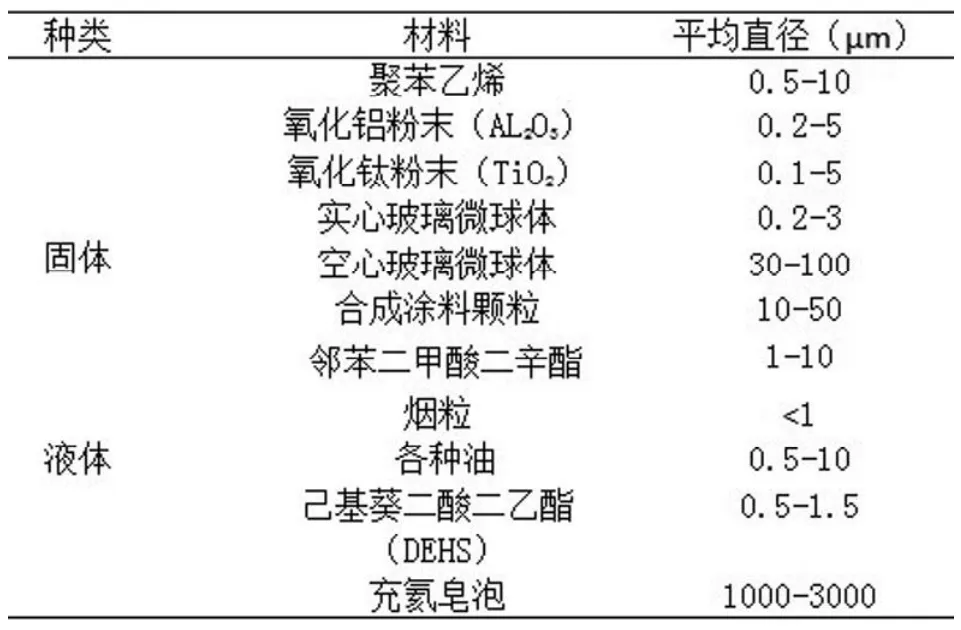
表2 气体中所用示踪粒子[12]
在实际的应用中,根据所使用PIV设备参数(激光强度,照相机分辨率等)和测量流场的具体情况,选择适合于具体问题的示踪粒子来得到较好的图像质量,才能通过图像后处理,提取出比较精确的测量结果。目前国内外很多人都对各种不同类型的粒子进行了广泛的研究[13][14],使得各领域流场测试结果更精确,更符合实际流场情况。
在选定了示踪粒子的种类之后,必须要依靠一个粒子发生系统将其均匀得散播到测试流场中去。尤其在风洞测量时,如何使粒子在曝光时最好的跟随流场,均匀分布在测试段,而不扰乱流场,决定了测量结果的准确度。根据示踪粒子的不同,应用于空气流中的散播设备可大致分为三种:一种是用来产生油粒子的,其核心部件是拉斯金喷管(Laskin nozzle);一种是适用于固体粉末的,利用喷雾器来形成具有均匀粒子的喷雾;还有一种是用来产生皂泡的系统,皂泡的运用能够增大观察区域(FOV)。
由于粒子成像测速是一种通过利用示踪粒子来对流体速度进行间接测量的技术,因此我们必须清楚所得到的结果并不完全是真实的流场,但现今的技术已经基本上能够真实的再现实际流场的结构等信息,其误差已经在可接受范围之内了。而各种适用于不同领域的新的示踪粒子相信在将来也会被更多的研究出来。
3 流场照明
示踪粒子投入到流场中后,必须被照亮后才能被相机记录下来,因此对流场的照明也是PIV核心技术之一。而激光作为一种高能量密度的单色光源,能够轻松地汇集成质量较好的薄光片照明流场而不产生色差,是适用于PIV的优质光源。
根据不同的应用场合,可以选取不同的激光来更好的实现实验方案。一些经常被选用的激光如下:
氦-氖激光(λ=633nm):如今市面上提供的氦-氖激光能量可以从1mW到10mW,由于其激光束的连续性和强度高斯分布的特性,使得它在PIV图像处理时能够更有优势。因此它是在可见光范围内的使用最普遍的一种有效的激光。
铜蒸汽激光(λ=510nm,578nm):这种激光波长是介于黄光和绿光之间的,能够到达KHz量级的频率。
氩离子激光(λ=514nm,488nm):与氦-氖激光相似,这是一种气体激发的激光。经常用于流体力学实验室中进行激光多普勒测速(LDV),在PIV中,则可用于低速水流的研究。
红宝石激光(λ=694nm):它能够传递很高的脉冲能量,由于连续性较好,其光束十分适合于全息成像。
半导体激光:主要有Nd:YAG lasers(λ=1064nm, λ =532nm)和Nd:YLF lasers(λ=1053nm, λ=526nm)两种。这种激光在连续的操作中具有比较优秀的光束质量,因此可以用于高速和全息PIV中。
激光在产生后通过一些光学镜的反射、折射后,汇集成所需强度的激光束,这一激光束再通过一些按照一定顺序和规律排列的光学透镜,最终形成照亮观察区域的片光。图4为利用透镜形成片光的原理图。

图4 用柱镜形成片光
流场照明对PIV测量的影响是显著的,照明光线的强度等特性不仅要与所选用的示踪粒子的光散射性能相匹配,还必须同所选用的成像传感器(CCD或CMOS)的感光范围相适应,因此对激光器的选用不能孤立地去考量,而要结合实际,考虑到整体的优化性能。
4 图像记录
PIV的图像记录方式可以分为两大类:单帧/多曝光PIV (single frame/multi-exposure PIV)和多帧/单曝光PIV(multi-frame/single exposure PIV)[15],如图5所示。单帧/多曝光PIV通过在很短的时间内照相,获得明显的流线斑图,再通过图像处理,就能得到流场信息[16]。但这种方式仍然存在一些缺陷,在对其进行处理时比较复杂。相反,随着数字图像记录方式的进步,多帧/单曝光PIV显示出其独特的优势,在高速甚至高超音速的领域有更好的表现。

图5 两种不同的图像记录方式
要想得到高质量的图像,选择一个合适的相机是关键。现今用于PIV测量的传感器主要是CCD和CMOS两种。CCD传感器可靠,产生的数据量较小,容易存储,CMOS传感器则速度快,可用于高速测量[17]。至今为止,大多数的PIV测量中都是使用CCD传感器,主要有以下四种: Full-Frame CCD;Frame Transfer CCD;Interline Transfer CCD;Full-Frame Interline Transfer CCD。
5 算法
通过相机采集到PIV图像后,就要利用合适的算法将图片中的有用信息提取出来(主要是粒子的位移)。当粒子浓度较低时,因为可以肉眼分辨出每一个粒子,就能够利用手动的方式来提取出粒子位移参数,这种建立在低密度情况下的形式可以形象的表述为对粒子的追踪办法,因此可称为“粒子追踪测速”(PTV)[18]。这种方法一般是在早期计算机技术不发达的时候所采用的,如今计算机强大的计算能力使得自动和快速的得出流场信息成为了可能。如今的PIV算法,大部分都是采取互相关技术,这种算法主要是用来对单帧/多曝光PIV图像进行处理,PIV Challenge[5][6]还对粒子跟踪技术和互相关算法进行了比较。本文主要讨论互相关算法。
PIV测速实际上是一种建立在拉格朗日“质点观点”上的研究流体运动的基本方法。它通过采集流场中示踪粒子的瞬时图像,测量某一粒子的影像在两幅图像上的位置变化,并考虑图像与被测流场的几何比例系数,计算出该示踪粒子处流体质点在采样时刻的瞬时速度。对所有示踪粒子进行相同的处理,就得到流场在采样时刻的速度分布[19]。
对于粒子图像测速技术互相关算法的步骤,可以叙述如下[20]:
图像前处理:在进行互相关计算之前,由于粒子成像、固体边界曝光过度、图像灰度不均匀等很多原因会使得图像中存在噪声干扰,使得对互相关计算的效率和精度产生影响,因此需要首先对图像进行前处理。图像的前处理包含两个方面,其一是对噪声以及背景图像的去除,其二则是对亚像素图像的插值。
高校现有的创新创业教育,鲜有针对大学生逻辑思维、分析推理及判断力的培养,更缺乏对其思维能力和思辨能力的训练,缺少对其独立发现、分析、解决问题能力的培养。大学生在创业过程中发现问题,却不知如何解决问题。因此,高校应积极引入批判性思维教育,提高大学生思维能力,改革创新创业课程,增强学生的创新精神、创业意识和创新创业能力。
区域离散:在互相关算法中首先需要对获得的图像进行离散,即将图像分成什么类型的小区域,其中包括块状区域离散、多重网格离散、线状区域离散、圆形区域离散、超解析度离散和无网格离散等。
制定匹配标准:将图像按照上述某种方式进行区域离散后,就需要制定一个匹配准则,即如何判定在第2幅图像中的图像小块即为第1幅图像中的图像小块,这种匹配的方法称为匹配准则。在不同算法中,这些匹配准则互不相同,其中最为常用的是基于快速傅立叶变换的互相关函数(cross correlation function,CC)匹配,其实所谓的互相关算法也就是由此而来。
选择搜索方法:在按照一定的准则对图形小块进行匹配的时候,采用不同的搜索方法也将会对计算速度产生影响,全范围的搜索法(Fs)精度高但耗时也多,而不完全搜索算法则通过缩减搜索范围,按照特定的搜索方法,在最有可能出现匹配区域的局部范围内找到次优解。不完全搜索算法有:3步搜索法(355),4步搜索法(455),交叉搜索法(Cs),新3步搜索法(N3Ss),多重跟踪搜索算法以及钻石搜索法(Ds)等。
变形预测:主要包括位移的泰勒级数展开、窗口偏移、窗口变形和高阶变形。
互相关计算结果的后处理:从PIV技术出现就伴随着对其结果的分析和处理问题,得到的速度矢量正确与否需要有一个判别准则,在不同的文献中都介绍了很多准则,由于各自算法的差异,还没有出现一个普遍的通用准则出现。全局速度连续法、连续方程法、局部均值法、局部中值法、信噪比(signal-to-noise ratio,SNR)或值法等等是其中应用较多的方法。
6 PIV技术的新进展
PIV经过20过年的发展,已经成为了一种能够成功适用于湍流定性及定量研究的工具。利用PIV除了能够得到速度量之外,我们还能够通过PIV数据计算出涡量、加速度和压力场。在环境工程,汽车和飞机制造,能源工程和防御工程中,PIV都提供了有效地帮助,且它的应用领域还在不断扩展[21]。近年来,Micro-PIV的出现,突破了传统微尺度流体力学测量手段的局限性,使得对微尺度流动元件的研究从过去只能给出流量、阻力特性等有限信息逐步转向对全流场内流结构的直接测量上[22][23]。
从PIV的技术进展上来说,它从80年代初期的一个切面发展到一个容积空间、从面内二维速度矢量到二维切片内三维速度矢量、从瞬间速度场测量到一个连续时间过程的速度场测量的各种方法和技术在原理上已经基本实现。虽然粒子成像测速技术已经有了如此大的进展,但对于非定常(非周期)三维空间复杂流动及其时间历程的观测仍然面临严峻的挑战,就全流场观测方法和技术本身而言,三维空间三维速度场时间历程(3Dt-3C)技术仍然是尚未攻克的难关,也是最具挑战性的前沿课题[24]。
如今粒子成像测速技术的发展主要就是实现对非定常三维空间复杂流动的观测和准确测量。涉及的技术方案目前有高速扫描PIV、散焦PIV(De-focus PIV)、多相机PTV(particle tracing velocimetry,PIV中一种)及全息PIV (HPIV)等。比较这些方法,技术原理上最有潜力的应该说是PIV技术和数字全息(digital holography,DH)原理相结合的数字全息粒子成像测速技术(DHPIV)。但该技术目前还未完全成熟,还有很多技术难关需要攻克。
总的来说,PIV技术对于流场研究具有不可磨灭的贡献,具有很大的发展潜力,未来PIV的适用范围将会更广泛,技术也将更加成熟。
[1]R. J. Adrian. Twenty years of particle image velocimetry[J]. Experiments in Fluids, 2005, 39: 159~169.
[2]俞晓磊,赵志敏,郭林峰.激光散斑干涉条纹的CCD分析技术研究[J].应用激光. 2007, 27(5):378~381.
[3]白锐,孙学伟,贾松良.材料热膨胀系数的激光散斑干涉测量方法[J].力学与实践. 2003, 25(4):38~39.
[4]申功炘.面向新世纪的粒子图像测速[J].流体力学实验与测量.2000, 14(2):1~15.
[5]M Stanislas, K Okamoto, Khler. Main results of the First International PIV Challenge [J]. Measurement Science and Technology. 2003, 14:63-89.
[6]M.Stanislas, K.Okamoto, C.J.khler, J. Westerweel. Main results of the Second International PIV Challenge[J]. Experiments in Fluids.2005,39:170-191.
[7]M.Stanislas, K.Okamoto, C.J.k?hler, J. Westerweel, F.Scarano. Main results of the third international PIV Challenge[J]. Exp Fluids. 2008, 45:27-71.
[8]Keane R D, Adrian R J. Theory of cross-correlation analysis of PIV images[J]. Appl Sci Res. 1992,49:191-215.
[9]k?hler C.J., Sammler B., Kompenhans J. Generation and control of particle size distributions for optical velocity measurement techniques in fluid mechanic[J]s. Exp. Fluids. 2002,33:736-742.
[10]严敬,杨小林,邓万权等.示踪粒子跟随性讨论[J].农业机械学报,2005, 36(6):54-56.
[11]李志平,李恩邦,李淳,唐春晓.全场光学测量中示踪粒子跟随性的数值分析[J].科学技术与工程.2007,20(7): 5208-5212.
[12]Markus Raffel, Christian E. Willert. Steve T. wereley, Jürgen Kompenhans. Particle Image Velocimetry-A Practical Guide [M]. Springer Berlin Heidelberg New York, 2007.
[12]Markus Raffel, Christian E. Willert. Steve T. wereley, Jürgen Kompenhans. Particle Image Velocimetry-A Practical Guide [M]. Springer Berlin Heidelberg New York, 2007.
[13]阮驰,孙传东,白永林等.水流场PIV测试系统失踪粒子特性研究[J].实验流体力学.2006,20(2):72-77.
[14]Melling A. Tracer particles and seeding for particle image velocimetry[J].meas. Sci. Technol. 1997,8:1406-1416.
[15]Adrian R.J. Particle-imaging techniques for experimental fluid mechanics[J]Ann. Rev. Fluid Mech.1991,23:261-304.
[16]殷士龙,唐洪武,徐友仁.流失图的单帧两次曝光记录[J].物理实验.1999, 20(3):15-16.
[18]Agüi J.C, Jiménez J. On the performance of particle tracking[J]. J Fluid Mech. 1987,185:447-468.
[19]孙鹤泉,康海贵. DPIV流场测试技术中的数据处理[J].大连理工大学学报. 2000,40(3):364-367.
[20]张伟,葛耀君,杨詠昕.粒子图像测速技术互相关算法研究进展[J].力学进展.2007,37(3):443-452.
[21]I Grant. Particle image velocimetry: a review[J]. Proc InstnMech Engrs.1997,211:55-76.
[22]王昊利,王元.Micro-PIV技术——粒子图像测速技术的新进展[J].力学进展. 2005,35(1):77-90.
[23]Miessner U, Lindken R, Westerweel J. Velocity Measurement in Microscopic Two-Phase Flow by means of Micro-PIV. PROCEEDINGS OF THE 6TH INTERNATIONAL CONFERENCE ON NANOCHANNELS, MICROCHANNELS, AND MINICHANNELS, PTS A AND B.2008.1111-1118.
[24]申攻炘,张永刚,曹晓光等.数字全息粒子图像测速技术(DHPIV)研究进展[J].力学进展.2007,37(4):563-574.
Particle Image Velocimetry——A whole fields technology without disturbs the flow
粒子成像测速(PIV)作为一种新的流场测试技术,不同于传统的热线、探针、雷达等测速方法,是能够在不扰乱流场的情况下(非介入),迅速地捕捉到整个流场速度信息的测量技术。它的出现为复杂流场的研究提供了更直接有效的方法。本文介绍了粒子成像测速方法的工作原理,核心技术,讨论了PIV技术的发展趋势。
粒子成像测速(PIV);全场技术;光学测量
As an new technique for fluid flow measurement, Particle Image Velocimetry (PIV), which different from the conventional way to measure the flow velocity (pressure probes, hot wires, laser Doppler velocimety),allows for capturing velocity information of whole flow fields in fractions of a second without disturbs the flow. It brings a more efficient way to study the complex flow field. This paper introduced the principle,core technology of PIV, discussed the further development of this new technique.
Particle Image Velocimetry(PIV);Whole Field Technique;optical method
10.3969/j.issn.1001-8972.2010.13.011
刘玥,厦门大学航空系硕士研究生,主要研究方向为实验流体力学;
梁忠生,厦门大学航空系硕士研究生,主要研究方向为实验流体力学;
鲍锋,厦门大学航空系教授,主要研究方向为航空推进技术,实验流体力学,风洞试验与测量技术,时序解析粒子影像测量技术(trPIV)。