两种混沌自同步方法的电路仿真比较
2010-11-07卢均治茂名学院电信学院525000
卢均治 茂名学院电信学院 525000
两种混沌自同步方法的电路仿真比较
卢均治 茂名学院电信学院 525000
基于混沌同步原理和方法,针对Lorenz电路,设计了两种混沌自同步电路,并用Multisim2001对电路进行仿真比较。观察到了预期的同步效果,获得了更加直观的认识和理解。
混沌系统;混沌同步;电路仿真
1、引言
在自然界及实验室存在着大量的同步现象,并有相当大的普遍性。所谓同步,通俗地说就是指动态系统中步调一致的现象。1990年美国海军实验室的学者Pecora和Carroll在电子学线路的设计实验中首次观察到了混沌同步的现象,他们发现一个混沌系统的某些相同的子系统在特定的条件下可以做到相互同步[1]。这里的两个系统同步,是指一个系统的轨道将收敛于另一个系统轨道的同一值,它们之间始终保持步调一致,并且这种同步是结构稳定的。混沌系统同步的方法有很多,如驱动-响应同步方法(Pecora-Carroll同步方法)、主动-被动同步方法、耦合同步方法、连续变量反馈微扰同步方法、自适应同步方法等。这些方法的各有各的优缺点。本文对驱动-响应同步方法、耦合同步方法进行模拟电路设计,然后利用Mulitisim2001对电路模型进行仿真比较,使我们对这两种同步方法有了更加直观的认识。
2、两种同步方法的电路仿真比较
由相关文献[2][3]可知实现混沌同步的有很多方法,但各种方法之间有很大的不同。现主要通过Mulitisim2001对电路模型进行仿真,说明驱动-响应同步及双向耦合同步两种方法在两个Lorenz电路耦合情况下的应用。
通过对Lorenz电路的研究,可以看出,如果传送作为同步信息的系统方程组中的变量是在单个或多于一个方程中出现的,可以利用这个变量,在系统方程组的每一处使用,从而缩短同步的时间,提高同步效率。事实上,大量的数值计算表明,对于我们所研究的非线性自治电路,仅仅通过单变量线性耦合即可实现混沌状态下的同步。因此,为简便起见,下面只考虑两个节点单变量耦合的情况。
(1)驱动-响应同步
对Lorenz系统以x为驱动变量,则驱动部分与响应部分的方程如下
其电路模拟仿真响应部分如图1;驱动部分电路图与响应部分类似。
运行该驱动响应同步系统可得到如图2的仿真结果。
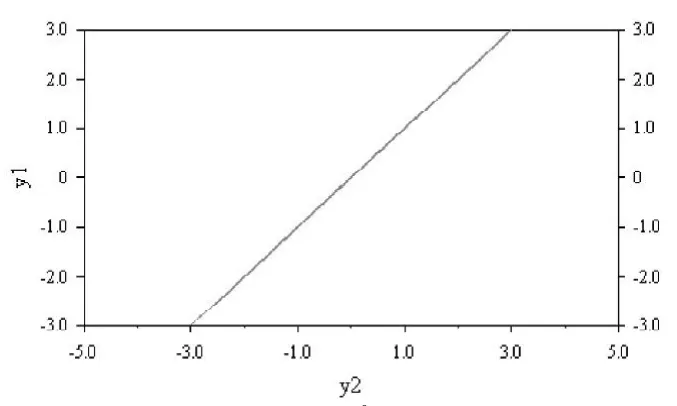
图2 y1-y2相平面图y
以z为驱动变量,则驱动部分与响应部分的方程为


图1 响应系统
该驱动响应同步系统的模拟电路图与以x为驱动变量的同步系统类似,故可参照图1,但该同步系统运行后的仿真结果为图3。
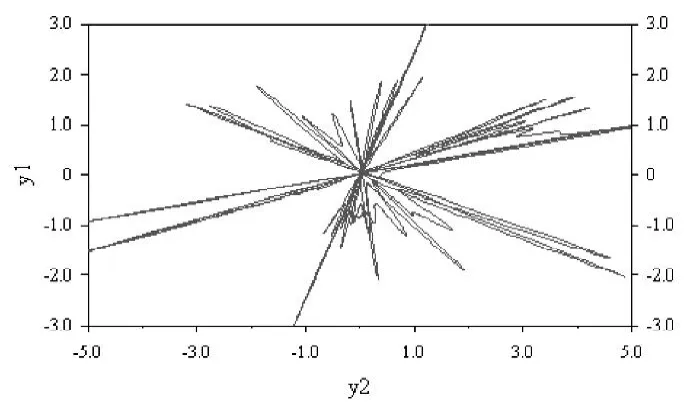
图3 y1-y2相平面图
由上图的电路仿真结果可以清晰地看到驱动系统(3)和响应系统(4)并不同步。从而可知采用不同的驱动变量对系统的同步有着决定性的影响。在选择使用时,一定要选择合适的变量。
(2)双向耦合同步
Lorenz电路的状态方程如下:
其中k为耦合系数,选取合适的k值就能使两系统同步。
对该同步系统进行模拟电路仿真:
其中耦合部分电路如图4。

图4 耦合电路
则系统1的电路为图5。
系统2的电路与系统1类似,取合适的耦合系数,运行系统得到仿真结果如下图6。
由图6可知,两系统很好地实现了同步。
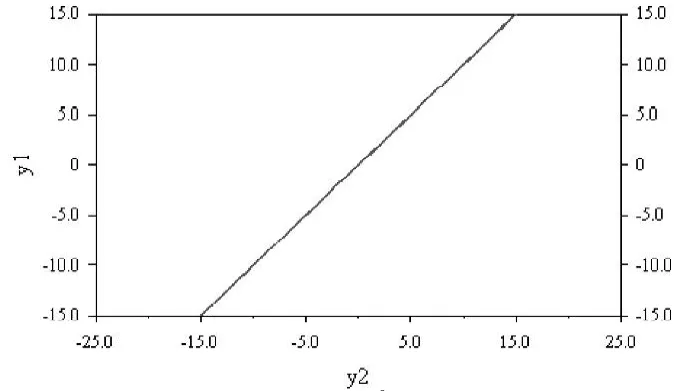
图6 y1-y2相平面图
3、结论
通过所设计两种混沌自同步电路,并用Multisim2001对电路进行仿真比较。所得仿真结果表明:直接双向耦合方式自同步的主要影响因素为耦合系数k,虽然对这类系统的同步有很多的研究,但因为该类系统具有复杂的动力学行为,目前的理论仅是一种充分性条件,因此确定合适耦合系数非常关键。
通过对两个Lorenz电路自同步的研究,发现节点的直接双向耦合与驱动响应耦合相比虽然同步后的状态难以确定,但是其满足同步的条件却比较宽松。通过耦合实现混沌系统之间的同步,并不能改变原来非线性系统的动力学特征。而驱动响应耦合却能够精确确定同步后的节点状态。由于驱动-响应同步系统是由一个稳定子系统和另一个不稳定子系统构成,这就大大限制了它的实际应用。因为在现实世界里,许多客观存在的实际系统在物理本质上是不能分割的,即它不可能分割成一个一部分稳定而另一部分不稳定的系统。而耦合同步系统就不存在这个问题,它可以不必对混沌系统进行预先的计算分析,从实验技术上可行,并且易于实现。因此耦合同步更容易应用到各种实际的领域中去。
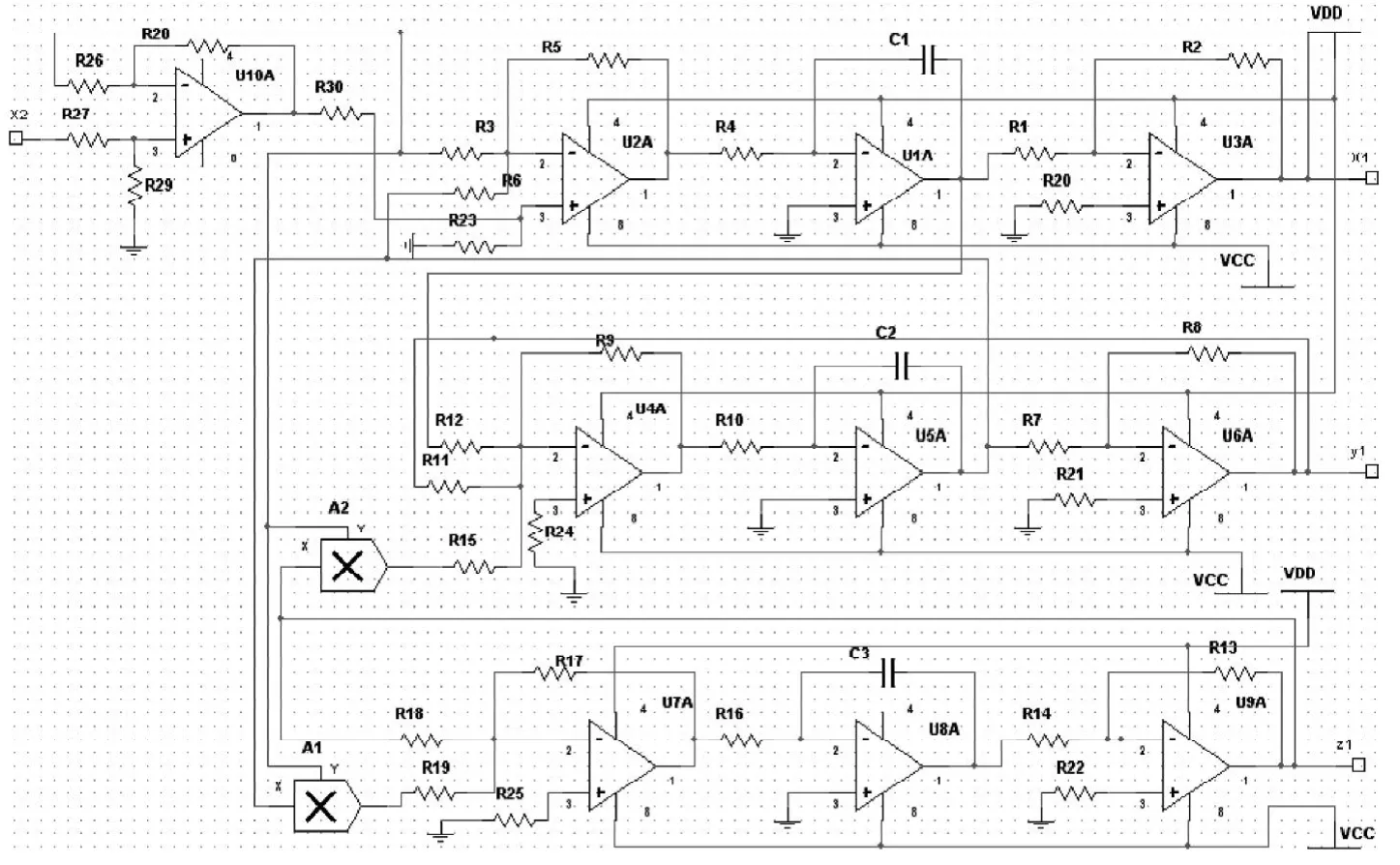
图5 系统1电路
[1] T.L.Carroll et al, Synchronizing Chaotic Circuits, IEEE Trans CAS.1991, Vol 38, No 8∶ 453- 456
[2] 刘崇新.非线性电路理论及应用[M]西.安∶西安交通大学出版社.2007∶ 207-208
[3] 邹恩,李祥飞,陈建国.混沌控制及其优化应用[M] .国防科技大学出版社 .2002
10.3969/j.issn.1001-8972.2010.11.052
卢均治(1980—),男,广东茂名人。茂名学院助教,硕士,主要从事自动控制及相关领域研究。
