变频驱动三相感应电机系统稳定性的数学推导与分析
2010-11-04郭云王刘德志陈俊全李富华
郭云王 东 刘德志 陈俊全 李富华
(海军工程大学电力电子技术研究所舰船综合电力技术国防科技重点实验室 武汉 430033)
变频驱动三相感应电机系统稳定性的数学推导与分析
(海军工程大学电力电子技术研究所舰船综合电力技术国防科技重点实验室 武汉 430033)
变频驱动感应电机系统在低转速、轻载下容易出现低频振荡现象。以变频驱动的三相电机系统为例,由电机小扰动模型及逆变系统开关模型入手,推导出全系统小扰动数学模型。利用现代控制理论赫尔维兹判据分析了系统的稳定性并绘制出三维不稳定区域,详细分析了不同运行工况下电机参数、直流滤波电感电容、变频器死区时间、调制频率、调制比等参数变化时对系统稳定性的影响规律并得到了仿真及实验验证。此推导与分析过程可以推广至变频驱动的多相感应电机系统中,结论有助于此类系统参数合理设计与稳定运行。
变频驱动 感应电机 小扰动模型 开关函数 稳定性
1 引言
交−直−交变频驱动感应电机系统在开环控制方式下容易出现低频功率振荡的现象,早期国外学者对此进行过一些研究,但由于采取一定的措施可以减弱振荡,逐渐忽略了对该问题的探索。随着舰船综合电力系统的不断发展,交−直−交变频驱动感应电机系统成为其中的一项关键环节,对其性能提出了更高、更严格的要求[1]。研究兆瓦级大容量交直交变频驱动多相感应电机系统期间,在空载开环、额定电压和频率时就出现了持续的低频振荡现象,导致保护开关频繁跳闸而无法试验,空载起动的相电流波形如图1所示。开展交−直−交变频驱动感应电机系统稳定性的研究变得必要而紧迫。
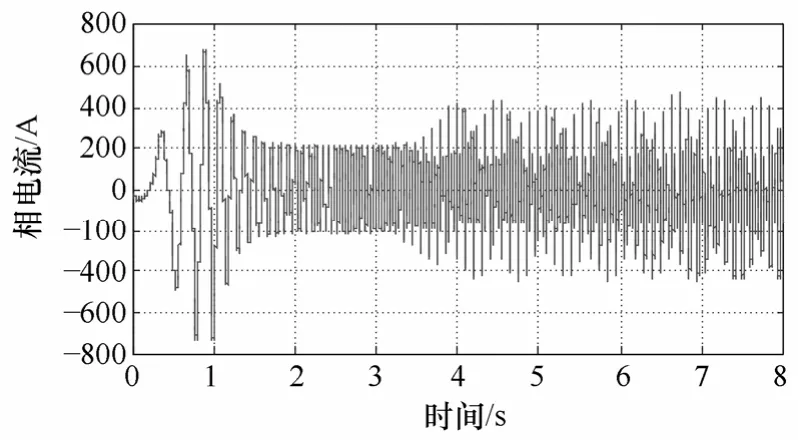
图1 某大容量变频驱动感应电机系统电流振荡波形Fig.1 Current waveforms of certain large-capacity inverter-fed induction motor drive system
20世纪60年代末,Lipo提出了系统的低频振荡是由逆变器直流环节滤波元件与电机磁场、转子之间的能量交换引起的观点,并预测了系统二维不稳定区域[2-3]。文献[2]通过根轨迹方法对三相对称的感应电机稳定性进行了分析。文献[3]由乃奎斯特判据对整流-相控逆变-感应电机系统的稳定性进行了理论分析和仿真验证。20世纪 80~90年代,Mutoh、Ueda等分析了变频驱动系统由于本身电机参数匹配性带来的系统不稳定问题,及死区时间对PWM 逆变器供电系统稳定性的影响,对影响低频振荡的一些因素给了定性解释[4-5]。文献[6]采用一种调节定子频率的方法使此类系统的低频振荡现象得到了一定的抑制。文献[7]从电力电子非线性现象的角度,通过分岔及混沌理论对系统的不稳定性进行了一些研究。20世纪 90年代后,国内开始对电机-负载系统的稳定性进行研究,但主要是针对同步发电机-整流系统稳定性的分析。文献[8]建立了同步发电机-整流器-反电动势负载系统的等效电路模型,分析了系统的稳定性。文献[9]分析了发电机参数、交轴稳定绕组及负载对 3/3相双绕组发电机系统运行稳定性的影响规律。文献[10]对3/3相双绕组发电机系统并联运行时的稳定性进行了研究。而对于变频驱动感应电机系统稳定性研究较少,主要是合肥工业大学、清华大学、天津大学等单位开展了相关研究工作,分析了PWM逆变器供电系统稳定性,研究了产生振荡的主要影响因素及抑制方法。文献[11]通过仿真模拟了系统的低频振荡现象,提出了一种低频振荡判据。文献[12]提出滤波器与电机之间可能构成自激振荡。文献[13]基于李亚普诺夫理论研究了铅酸动力电池组供电的电压源型逆变器-牵引感应电机传动系统的稳定性。但上述研究未涉及滤波器参数、逆变器参数及系统的不同运行负载工况,也未对系统的不稳定区域进行充分的实验验证。
本文以交−直−交变频驱动的三相电机系统为例,考虑了电机参数、直流滤波电感电容、变频器死区时间、调制频率、调制比以及运行工况等因素,对系统稳定性进行了深入全面的研究,为舰船综合电力系统中大容量交−直−交变频驱动的多相感应电机系统的参数设计和稳定性分析打下了基础。
2 变频驱动三相感应电机系统的组成
常见的交−直−交变频驱动三相感应电机系统主要由三相电源、不控整流、滤波环节、PWM 逆变器及感应电机组成,如图2所示。

图2 变频驱动三相感应电机系统组成原理图Fig.2 Structure of inverter-fed three phase induction motor drive system
3 感应电机的小扰动数学模型
对于一个理想三相感应电机,所做假设可参见文献[1-2],其数学模型由磁链方程、电压方程、转矩方程和运动方程组成。磁链方程

式中 Ls——定子等效自感;

Lms——原三相绕组任意两相间最大互感。同步旋转坐标系下电压方程

式中 p——算子d/dt;
rs——定子电阻;
ωe——同步旋转角速度;
ωr——转子旋转的角速度。
转矩方程

式中 P——电机的极对数。
运动方程

式中 TL—负载转矩;
J—转动惯量。由式(1)~式(4)表示的数学模型可以推导出线性化的系统小扰动模型。忽略谐波影响,在初始的稳态下,令式(2)中p=0。文中带有下标“0”的变量均表示其相应的初始稳态值。式中,

稳态工作时,解方程组,可得ids0、iqs0、id′r0、和Te0,如式(6)所示。
式中 Um——相电压幅值;
Ts——定子时间常数,
Tr——转子时间常数,

在小扰动条件下,系统中各变量在稳定点附近产生一定的增量,结合电磁转矩方程和运动方程,可得完整的三相感应电机小扰动数学模型如式(7)所示。

4 三相电压型逆变器系统的平均模型
三相电压型逆变器系统由滤波环节与逆变器两大部分组成。将开关器件与反并二极管组合看成一个理想开关,利用开关函数描述开关行为,该系统可等效为三个单刀双掷开关的并联,则可建立系统的开关平均等效模型[14-16]。
假定Sap、Sbp、Scp表示上半桥中分别连接a、b、c相理想开关的状态,San、Sbn、Scn表示下半桥中分别连接a、b、c相理想开关的状态。
以其中一相对应的开关为例,设 S在开关闭合时为1,开关断开时为0的开关函数,有如下关系式:

在远低于开关频率的范围内,开关网络可以用平均模型建模。开关函数S的平均值为相应的占空比d。列写出逆变器系统的状态方程

即

按电路结构得到三相电压型逆变器系统平均模型,如图3a所示。再经dq旋转坐标系变换,可得旋转dq坐标系下平均等效模型,此时dq是解耦的,如图3b所示。

图3 三相电压型逆变器系统平均模型Fig.3 Average model of three phase voltage-source inverter system
式中 Lf——直流侧电感值;
Cf——直流侧电容值。

直流侧电压来源于电网,若忽略其变化ΔUdc=0;同时由

式中,M为逆变器调制比,可得

通常,为防止逆变器同一相上、下两桥臂的器件同时导通发生短路故障,须设置一段死区时间td。死区的影响是产生一系列宽度为td的畸变脉冲电压,这些脉冲列可以等效为一个矩形波的偏差电压Uef,经过傅里叶分解,此偏差电压的基波分量幅值为

式中 fc——开关频率。
经过分析,死区时间可等效为定子电阻,其值为

由式(7)、式(14)和式(16),最终得到包含死区时间的全系统小扰动数学模型为式(17)。
由该系统小扰动数学模型则可通过现代控制理论赫尔维兹稳定性判据,对系统稳定性进行分析。

5 系统不稳定性域的仿真与实验验证
5.1 由电压-频率-转矩表示的三维不稳定区域
为了验证数学推导的结论,建立了系统仿真模型及实验系统,参数详见表1。

表1 电机参数Tab.1 Parameters of motor
通过稳定性分析可知该系统的固有不稳定区域远离正常工作区,要在工作区模拟出系统的振荡可以通过增大定子电阻、减小转子电阻、减小定子漏抗或减小转子漏抗四种方式来实现。显然,后面三种方式在实际中难以实现,故考虑在电机定子输入端每相串联了相同的电阻r0,来模拟系统的振荡现象。
当变频驱动感应电机系统各参数一定时,系统的不稳定性分别与定子电压、定子频率(转速)和负载量(输出电磁转矩)三个量有直接的关系。为形象地表示系统不同工况下的不稳定性,由系统小扰动数学模型,可以由计算机绘制出三维不稳定区域,以及理想空载下和恒压频比时 U-Te、Te-f坐标面投影的不稳定域,如图 4所示。x坐标为定子频率,y坐标为定子电压,z坐标为电磁转矩。

5.2 仿真分析系统不稳定区域
由图4可见,此系统在低频、轻载下将出现不稳定现象。以空载(输出转矩为零)为例进行分析验证,如图5所示,横坐标为定子频率,纵坐标为定子电压有效值,区域内为系统不稳定区,区域外均为稳定区。图中“。”与“×”表示进行仿真验证所选择的点。其中,“。”表示的点A、B、D、E、G、H、J、K、L处于稳定区,“×”表示的点C、F、I处于不稳定区。
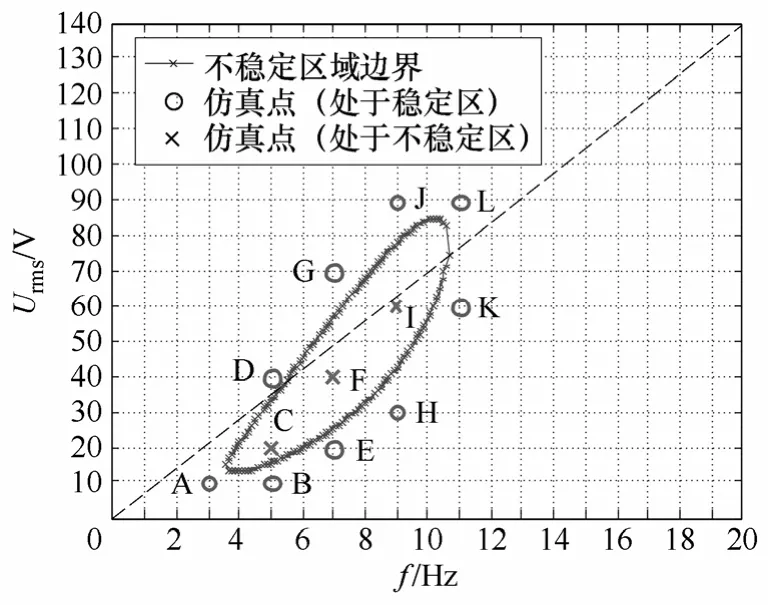
图5 系统空载运行时的不稳定区域Fig.5 Unstable region with simulation points at no-load
在 Matlab/Simulink软件中建立了变频驱动三相感应电机系统仿真模型。仿真结果表明,处于稳定区内的A、B、D、E、G、H、J、K、L点所对应的工况下,系统能够稳定运行,转速波动很小,电流不出现畸变,转矩脉动小;处于不稳定区内的C、F、I点所对应的工况下,系统出现转速持续振荡,电流波形畸变,转矩在大范围内脉动,即出现了低频振荡现象。仿真与理论分析结论是完全一致的,证明了理论推导与分析的正确性。图6为其中部分工作点下的电流、转速、转矩仿真波形。
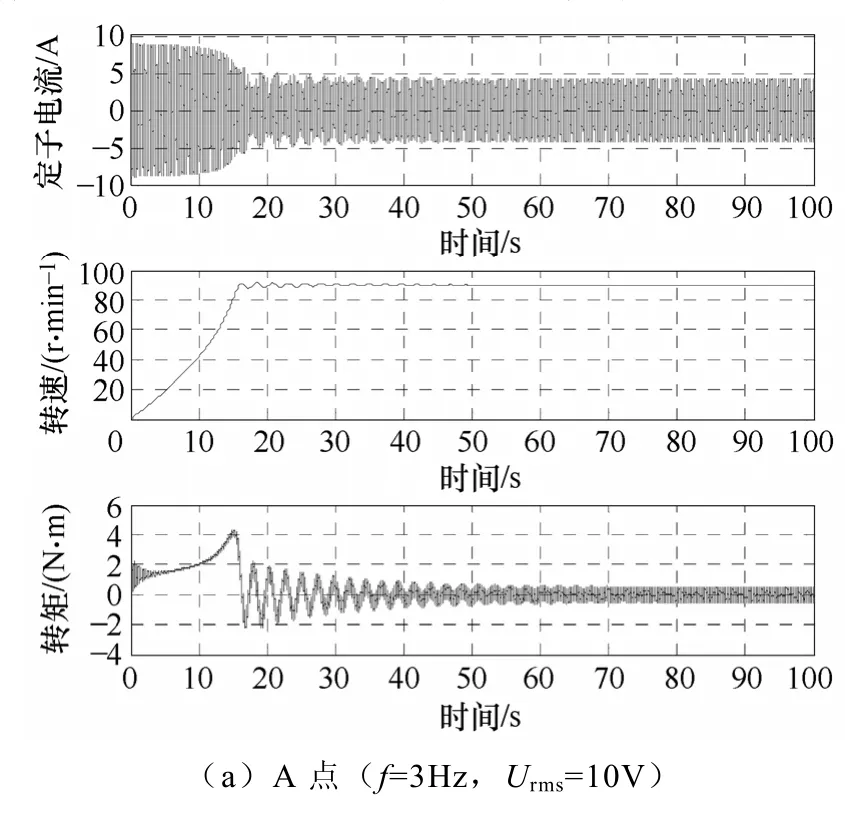

图6 三个工况点运行的定子相电流、转速、转矩仿真波形Fig.6 Simulation waveforms of stator phase current, speed and torque under different operation conditions
5.3 系统不稳定区域的实验验证
实验系统由供电电源、不控整流柜、滤波-逆变器以及三相感应电动机构成,如图2所示。在电机定子输入端串联了三相电阻,每相r0=1.0Ω,第4.86s时刻串入,14.74s时刻切除;由于实验中负载难以保持恒定,以空载实验加以验证。根据解析分析得到的系统空载不稳定区域和实验结果拟合出的不稳定区域(虚线)如图7所示。
以出现振荡的工况点X为例,系统振荡时采集的实验波形如图8所示。在投入电阻之前,系统运行时远离振荡区,电压、电流和转速均保持稳定,投入电阻后,X点处于系统不稳定区域内,各量出现振荡现象,再切除电阻后系统恢复稳定运行。但由图8可看出,其中电流和转速的振荡较为明显,电压振荡现象并不十分明显,这主要与系统的不稳定程度以及直流侧电容作用有关。事实上,串入更大电阻后,振荡现象明显加剧,电压也呈现较大幅度的振荡,限于篇幅,串入更大电阻时的实验振荡波形文中已略去。

图7 系统不稳定域的理论分析结果与实验结果对比Fig.7 Comparison between mathematic analysis and experiment results

图8 系统出现振荡的实验波形Fig.8 Experiment oscillation waveforms
实验结果表明,该实验系统出现的振荡区域与理论分析得到的区域是一致的。实验结果拟合得到的振荡区域范围与理论分析区域相比略小,主要原因是:
(1)存在一定的空载损耗,输出转矩非零。
(2)实验中电机参数随温度、磁路饱和等发生变化。
(3)电源电压及直流侧电压并非为理想的恒定值。
6 参数变化对系统稳定性的影响规律
当系统各参数变化时,可能对系统的稳定域产生影响。它可能使系统由稳定状态变为不稳定状态或由不稳定变为稳定,也可能仅仅会增大或减小系统的稳定裕度。对不同参数变化情况下系统的稳定域边界量化分析和深入研究是十分有意义的。
由于影响系统稳定性的参数众多,限于篇幅,文中主要以电机定子电阻和系统负载量两个参数为例,分析其变化时对全系统稳定性的影响规律,而其他参数则可类似地进行分析。
对系统小扰动模型的推导结果进行分析,当电机定子输入端串联电阻r0分别为0Ω、0.3Ω、0.6Ω、0.9Ω、1.2Ω时,系统的不稳定域边界变化情况如图9所示。可见,定子电阻增大时,系统的不稳定域将增大,同时不稳定域的边界将逐渐向 V/f值增大的方向移动。

图9 改变定子电阻时的不稳定区域变化规律Fig.9 Influence law of unstable region of system with different stator resistances
针对某一典型工况,可通过根轨迹法分析系统的稳定性,以及参数变化时稳定裕度的变化规律,得出在该状态下系统最稳定或最不稳定时的该参数值。以f =10Hz、Urms=70V的工况为例,分析可知,当串联的电阻0.90Ω<r0<5.02Ω时系统不稳定,且当r0=1.99Ω时系统的特征根具有最大的正实部,故最不稳定。图10所示为影响系统稳定性的两个特征根(其他特征根始终具有较大的负实部)在定子电阻参数变化时的轨迹变化情况。

图10 改变定子电阻,f =10Hz、Urms=70V时根轨迹图Fig.10 Roots locus of system with different stator resistances
类似地,可以分析负载量变化对全系统稳定性的影响规律。由图7知,电机定子输入端串联电阻r0为1.0Ω时,系统存在一定的不稳定域。当负载量变化时,系统的不稳定域将逐渐减小,当负载量增大至某一值时系统将变得稳定,如图11所示。系统的输出转矩分别为0N·m、14.8N·m、28.1N·m、40.2N·m、51.0N·m(由Te-s曲线知,转差率分别为0、0.002、0.004、0.006、0.008),系统的不稳定域不断减小,系统趋于稳定。

图11 串入r0并改变负载量(转差率)时不稳定区域变化规律Fig.11 Influence law of unstable region of system with different loads
以f =6Hz、Urms=30V的工况为例,通过根轨迹法分析负载(转差率)参数变化对系统稳定性的影响规律。转差率s由0增大至∞时,影响系统稳定性的三个特征根(其他特征根始终具有较大的负实部)轨迹变化情况如图12所示。可知此工况下,转差率 0<s<0.0094时,系统不稳定;0.0094<s<0.049时,系统稳定,但当 s>0.049时系统又再次变为不稳定。但应当特别注意的是,s>0.049时的不稳定并不是由于系统参数不匹配带来的,而是由于感应电机本身的Te-s曲线关系下稳定运行区域决定的。同时,当s=0时系统具有参数不匹配时带来的最大的不稳定性。

图12 串入r0并改变负载量,f =6Hz、Urms=30V时根轨迹图Fig.12 Roots locus of system with different loads
相应地,可以得到在任意某指定工况下不同参数变化时系统的稳定域边界和稳定裕度的变化规律。
各参数单独变化时对系统稳定性的影响规律总结见表 2。事实上,采用该方法对于多个参数共同变化时系统的不稳定域变化规律也很容易得出,本文限于篇幅而省略。经分析,交−直−交变频驱动感应电机系统中,电机的输入电压、定子频率、负载量、定转子的电阻与漏抗,以及死区时间(调制频率)是影响稳定性的主要因素。该结论有助于对此类系统进行合理的参数设计,以保证系统在开环调试状态下能够稳定运行。

表2 各参数变化对系统稳定性的影响规律Tab.2 Stability influence law of different parameters
7 结论
本文以三相电机为例,建立了变频驱动的感应电动机系统的小扰动数学模型,利用现代控制理论中的赫尔维兹判据分析了系统的稳定性,编程绘制出了其在不同工况时(不同定子电压、定子频率以及输出转矩时)的三维不稳定区域。通过 Matlab/ Simulink仿真分析和模拟实验研究表明,系统的振荡区域与解析分析结论相吻合,证明了分析方法的正确性。
以定子电阻和负载量为例,通过根轨迹法对不同参数变化时系统的稳定域边界和稳定裕度变化情况进行了详细地分析,得出了各参数对系统稳定性的影响规律,多个参数共同变化对不稳定性的影响规律可类似分析。本文的数学推导与分析过程可以推广到多相的变频驱动感应电机系统的稳定性分析中,并可以为此类系统的参数设计和稳定可靠运行起到一定的指导或借鉴作用。
[1] 马伟明. 舰船动力发展的方向——综合电力系统[J].海军工程大学学报, 2002, 14(6): 1-5. Ma Weiming. Integrated power systems——trend of ship power development[J]. Journal of Naval University of Engineering, 2002, 14(6): 1-5.
[2] Nelson R H, Lipo T A, Krause P C. Stability analysis of a symmetrical induction machine[J]. IEEE Transactions on Power Apparatus and System, 1969, 88(11): 1710-1717.
[3] Lipo T A, Krause P C. Stability analysis of a rectifierinverter induction motor drive[J]. IEEE Transactions on Power Apparatus and System, 1969, 88(1): 55-66.
[4] Ueda R, Sonoda T, Koga K. Stability analysis in induction motor driven by V/f controlled generalpurpose inverter[J]. IEEE Transactions on Industry Applications, 1992, 28(2): 472-481.
[5] Ueda R, Sonoda T, Koga K. Experimental results and their simplified analysis on instability problems in PWM inverter induction motor drives[J]. IEEE Transactions on Industry Applications, 1989, 25(1): 86-95.
[6] Mutoh N, Ueda R, Sakai K, et al. Stabilizing control method for suppressing oscillations of induction motor drive by PWM inverters[J]. IEEE Transactions on Industrial Electronics, 1990, 37(1): 48-56.
[7] Banerjee S, Verghese G C. Nonlinear phenomena in power electronics[M]. New York: IEEE Press, 2001.
[8] 马伟明, 胡安, 刘德志, 等. 同步发电机-整流器-反电动势负载系统的稳定性分析[J]. 电工技术学报, 2000, 15(1): 1-6. Ma Weiming, Hu An, Liu Dezhi, et al. Stability analysis of synchronous machine with diode-bridge rectifier and back-EMF load[J]. Transactions of China Electrotechnical Society, 2000, 15(1): 1-6.
[9] 杨青, 马伟明, 吴旭升, 等. 3/3相双绕组发电机系统的运行稳定性[J]. 中国电机工程学报, 2003, 23(4): 86-90. Yang Qing, Ma Weiming, Wu Xusheng, et al. Stability of 3/3-phase double winding generator with simultaneous AC and rectified DC load[J]. Proceedings of the CSEE, 2003, 23(4): 86-90.
[10] 杨青, 马伟明, 刘德志, 等. 3/3相双绕组发电机系统的并联运行稳定性[J]. 中国电机工程学报, 2007, 27(15): 75-82. Yang Qing, Ma Weiming, Liu Dezhi, et al. Stability of paralleled 3/3-phase double winding generators with simultaneous AC and rectified DC load[J]. Proceedings of the CSEE, 2007, 27(15): 75-82.
[11] 李红梅, 李忠杰, 刘良成. 逆变器供电下异步电动机低频振荡现象的研究[J]. 电工技术学报, 2000, 15(3): 16-19. Li Hongmei, Li Zhongjie, Liu Liangcheng. Analysis low frequency oscillation of inverter fed asynchronous motor[J]. Transactions of China Electrotechnical Society, 2000, 15(3): 16-19.
[12] 严干贵, 姜齐荣, 蒋霞,等. 变频电源驱动下的中高压异步电动机的振荡分析[J]. 电力电子技术, 2003, 37(3): 45-48. Yan Gangui, Jiang Qirong, Jiang Xia, et al. Oscillation analysis of induction motor driven by variable amplitude and frequency voltage source[J]. Power Electronics, 2003, 37(3): 45-48.
[13] 程夕明, 欧阳明高, 孙逢春. 基于铅酸动力电池组供电的电压源型逆变器-牵引感应电机传动系统的稳定性研究[J]. 中国电机工程学报, 2003, 23(10): 137-141. Cheng Ximing, Ouyang Minggao, Sun Fengchun. Stability study of the voltage source inverter traction induction machine drive system feeding on a leadacid traction battery package[J]. Proceedings of the CSEE, 2003, 23(10): 137-141.
[14] Hiti S, Boroyevich D, Cuadros C. Small-signal modeling and control of three-phase PWM converters[C]. Industry Applications Society Annual Meeting, 1994: 1143-1150.
[15] 徐德鸿. 电力电子系统建模与控制[M]. 北京: 机械工业出版社, 2005.
[16] 陈明亮. 电力电子变换器端口特性分析及应用研究[D]. 武汉: 海军工程大学, 2007.
Mathematical Deduction and Stability Analysis of Inverter-Fed Three-Phase Induction Motor Drive System
Guo Yunjun Wang Dong Liu Dezhi Chen Junquan Li Fuhua
(National Key Laboratory for Vessel Integrated Power System Technology Naval University of Engineering Wuhan 430033 China)
The inverter-fed induction motor drive system may become unstable at low frequencies and light load. Taking the inverter-fed three-phase induction motor drive system as an example, the small disturbance mathematic model of whole system is deduced. Based on small disturbance model of induction motor and switching model of inverter system, the three-dimensional unstable region is presented and discussed by Hurwitz stability criterion of modern control theory. The results of mathematic analysis, simulation and experiments are identical. The effect of different motor parameters, filter-inverter parameters, and operation conditions on system stability is studied in details. The analysis method can be applied to inverter-fed multiphase induction motor drive system, and the conclusion obtained in the paper may contribute to the design of parameters and stable operation of the system.
Inverter-fed, induction motor, small disturbance model, switching function, stability
TM343
国家自然科学基金创新研究群体(50721063)和国家自然科学基金(50877077)资助项目。
2009-06-22 改稿日期 2009-09-08
王 东 男,1978年生,博士,副教授,从事电力推进、独立电源系统等方面的研究。